
Fターム[3C007KX07]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411)
Fターム[3C007KX07]の下位に属するFターム
指、吸着パッドに設けるもの (181)
Fターム[3C007KX07]に分類される特許
221 - 230 / 230
ロボットハンド

【課題】軽量で構造が簡単な汎用性の高い安価なロボットハンドを提供すること。
【解決手段】1台のモータ1の出力軸2に太陽歯車3を固定し、この歯車にかみ合う遊星歯車4を、この太陽歯車を取り囲むように配置し、それぞれの遊星歯車の回転軸には、L字状、あるいは偏心軸、またはスパイラル状の交換可能なフィンガー6を取り外し自由に固定できる構造とする。さらに、モータの出力軸と太陽歯車の間にトルクセンサを挿入し、遊星歯車の回転軸に固定したフィンガーが物品を把持するときに発生する反力をトルクとして検出することにより、把持力の検出ができる。
(もっと読む)
ウエハ搬送アームとウエハ搬送装置

【課題】ウエハの擦れによる塵の発生が抑えられたウエハ搬送装置を提供する。
【解決手段】ウエハ搬送アーム110は、アーム本体130と、アーム本体130の先端部に設けられた二つの固定爪140と、アーム本体130に対して±X方向に移動可能な一つの可動爪160と、ウエハ10の外周縁を光学的に検出するための二つのセンサー150とを備えている。二つのセンサー150は搬送基準軸を挟んでウエハ10のノッチ12の幅より広い間隔を置いて配置されている。固定爪140はウエハ10を把持して心出しするためのウエハ心出し把持面142とを有し、可動爪160はウエハ10を把持して心出しするためのウエハ心出し把持面162とを有している。ウエハ心出し把持面142とウエハ心出し把持面162の幅はいずれもウエハ10のノッチ12の幅よりも広い。
(もっと読む)
ガラス搬送装置およびその使用方法
ガラス搬送装置および方法であって、ガラスシートがガラス製造設備内のある地点から別の地点へと移動される際に、ガラスシートの振動を最小限に抑えるようにガラスシートと係合しそれを保持するための強化ロボットが使用される、ガラス搬送装置および方法が本明細書に記載されている。強化ロボットは、1つ以上の吸着カップおよび1つ以上の空気力学式装置を使用することによって、ガラスシートと係合しそれを保持する。吸着カップは、ガラスシートが移動される際に、ガラスシートの外側縁部または非品質領域と接触してそれを支持する。また、空気力学式装置は、ガラスシートが移動される際に、ガラスシートと接触せずに空気力学式装置がガラスシートの品質領域を支持および保持できるように、ガラスシートの中央部分または品質領域に向かってガスを放出する。該装置はまた、空気力学式装置から放出されるガスの温度がガラスシートの温度と実質的に一致するように、空気力学式装置からガラスシートに向かって放出されるガスの温度を調節するための温度制御装置を使用してもよい。 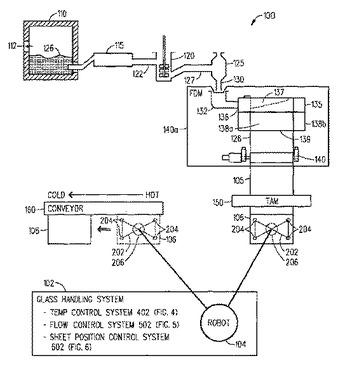 (もっと読む)
(もっと読む)
センサモジュールおよびこれを用いたロボットハンド
【課題】異なる圧力の作用状態を検出する3種類の感圧センサを所望する位置に円滑に混在させて配置することができるセンサモジュールおよびこれを用いたロボットハンドを提供する。
【解決手段】圧力の作用により抵抗値が個々に減少するように抵抗変化率を異ならせた3数種の感圧ゴム11a〜11cによって電極22を被覆してなる複数の感圧センサ13a〜13cと、これらの感圧センサにより検出された電極に対する抵抗値に基づいて圧力の作用状態を判断するCPUと、このCPUの判断情報を外部に通信によって伝達する接続端子とを備え、上記複数の感圧センサの電極、CPUおよび接続端子を電気的に接続してモジュール化している。
(もっと読む)
仕上げ加工装置
【課題】 バリ取り動作の無駄を少なくし、かつ削りすぎをも防止できる仕上げ加工装置を提供する。
【解決手段】 被加工ワークのバリ取り表面に対して、力制御を用いて加工ツールを押し付けて、該表面を倣い、表面形状の位置データを求める(S1)。又、ロボットの撓みによる誤差をこの位置データに対して補正する(S2)。得られた位置データとCADから得られたバリ取り表面形状の目標形状とを比較する(S6,S10)。表面形状の法線方向のずれを求める(S7,S11)。ずれの開始位置(S8)と終了位置及びそのずれの大きさによって、バリの発生開始位置と終了位置、その高さを求める(S14)。バリの終了位置と開始位置を結ぶパスとバリを除去する切削パスからなる加工プログラムを作成し、実行する(S16,S17)。バリ位置を求めそのバリ位置まで移動してそのバリを除去するので、効率よくバリ取りができる。
(もっと読む)
基板移送装置
【課題】基板を安定して移送することができ、基板の収納状態も感知することができる 基板移送装置を提供すること。
【解決手段】基板移送装置はハンド130a、130bがピックアップ位置から溝の位置に戻った時、ハンド130a、130bのポケット部132に配置された基板Wを把持する把持部材140を含む。この把持部材140は基板Wのエッジと面接触する湾曲部144aを有し、そして少なくとも一つのハンド130a、130bの移動方向と同一の方向に移動可能に前記ベース上に設けられるプッシャー144及びプッシャー144が基板Wのエッジを側方に押すように弾性力を加える弾性体146を含み得る。
(もっと読む)
触覚センサを有するロボットの教育
【課題】作業環境内で正確に仕事を行うために、ロボットを教育および/または較正するために有益な方法および装置を提供する。
【解決手段】本発明は、ロボット12に連結して作動し、ロボット12の作業環境内の1つ以上の所望位置に位置付けられる1つ以上の触覚センサデバイス38を備える。本発明の1つの構成によれば、作業環境内にタッチ感応面(タッチ感応ゾーン)を設け、このタッチ感応面を対象物に接触させ、前記タッチ感応面に対する接触位置を示す信号を発生させ、発生した前記信号を含む情報を用いて、前記作業環境内の接触位置をロボット12に教える、各工程を含むことを特徴とする。  (もっと読む)
(もっと読む)
把持装置および移載機
【課題】容器21が変形していても確実に把持できる把持装置13を提供する。
【解決手段】容器21の側面に当接して押さえる側面押え部39を設ける。容器21の上側周縁部で内周側に折り曲げられている折曲部27に係脱可能とするフック49を設ける。フック49を容器21の折曲部27に係合させて側面押え部39との間で把持する把持位置と、容器21の折曲部27から離反する把持解除位置との間で移動させるシリンダ47を設ける。側面押え部39が容器21の側面に当接して押さえ、フック49が容器21の折曲部27に係合し、これら側面押え部39とフック49との間で容器21が変形していても確実に把持する。
(もっと読む)
把持装置
【課題】可動側把持部と定置側把持部の間でワークを把持するのに、可動側把持部の移動案内を振動し難く常に安定した姿勢で行え、可動側把持部の移動装置が故障したときも把持姿勢を維持できる把持装置を提供する。
【解決手段】第1の方向Aに移動自在な移動体10と、移動装置15と、第1の方向に対して直交する第2の方向Bに向ってワーク50を支える定置側把持部21,22と、第1、第2の方向に対して直交する第3の方向Cに沿った軸心36を中心とした揺動方向に揺動自在なアーム部材30と、アーム部材に設けた被案内部37を案内することで、アーム部材を揺動方向および第2の方向に移動するよう案内する案内部材40を備えている。アーム部材に、アーム部材が第2の方向と平行に位置した際に、定置側把持部と対向する可動側把持部26と、移動体に形成したカム部12に案内されるカムフォロア38を設けた。
(もっと読む)
伸縮式の手のひらを有するロボットハンド
【解決手段】ロボットハンドは、指と手のひらとを有する基部を備える。指は可動範囲を定める。ハンドは、手のひらから指の可動範囲までの距離を変化させることによって、指と手のひらとの間で物体を把握することができる。この距離を変化させることは、手のひらを指の可動範囲に向かって動かすか、指の可動範囲を手のひらに向かって動かすことによって達成可能である。手のひらを動かすロボットハンドは、手のひらを基部から指の可動範囲に向かって伸ばすアクチュエータを備える。手のひらに対して指の可動範囲を動かすロボットハンドは、基部に対して平行移動するように構成された共通指支持部に指が取り付けられている。 (もっと読む)
221 - 230 / 230
[ Back to top ]