
Fターム[3C007KX07]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411)
Fターム[3C007KX07]の下位に属するFターム
指、吸着パッドに設けるもの (181)
Fターム[3C007KX07]に分類される特許
161 - 180 / 230
チャック装置

【課題】検出部を設けることによる大型化を抑制しつつ、簡素な構成で把持部の開閉量を高精度に検出する。
【解決手段】チャックボディ12に供給される圧力流体によってピストン14を変位させることにより、把持部22を構成する一組の第1及び第2フィンガ20a、20bをベース体36に沿って開閉動作させると共に、前記第1及び第2フィンガ20a、20bの内部に軸状のボビン78を挿通させ、該ボビン78の小径部90にコイル86を巻回している。そして、第1及び第2フィンガ20a、20bの開閉動作に伴うコイル86のインピーダンス変化から開閉量を検出している。
(もっと読む)
ガラス搬送ロボットハンド

【課題】 搬送ロボットハンドにより、ガラス板をパレットへ積みつける際に、ガラス板のズレ現象を防止するため、合紙をガラス板間に挟むようにするが、その合紙もガラス板と同時にパレットへ搬送できるロボットハンドにする。しかし、その搬送の際に風圧による合紙のめくれと、パレット積載時の合紙の垂れ下がりとによるトラブルを防止し、効率的なガラス搬送ロボットハンドを提供する。
【解決手段】 二つの課題を解決するため、ガラス搬送ロボットハンド10に吸着されたガラス板1面前に対向して合紙2を配置させると共にそれら面間にブローによるブローダウンする風を送り吸着させ、その風向をガラス面と合紙の4角の対向面方向に特に向け、搬送中のめくれ、と、積付け時の垂れ下がりを発生させないことを特徴とするガラス搬送ロボットハンド。
(もっと読む)
把持装置、及び、ハニカム構造体の製造方法
【課題】 ハニカム構造体を適切な姿勢で把持し、所定の位置に簡便に搬送して載置することができる把持装置を提供すること。
【解決手段】 本発明の把持装置は、回転軸が平行となる少なくとも2個の支持ローラを有する第一の把持部と、上記第一の把持部の支持ローラに対向する少なくとも1個の支持ローラを有する第二の把持部と、上記第一の把持部及び上記第二の把持部を有する少なくとも1つの把持機構とを備え、上記第一の把持部の支持ローラの回転軸と上記第二の把持部の支持ローラの回転軸とは平行になっており、上記第一の把持部及び上記第二の把持部の少なくとも一方を移動させることにより、上記支持ローラを介して上記第一の把持部と上記第二の把持部との間に被把持物を把持することを特徴とする。
(もっと読む)
ロボットの姿勢検出装置及びその方法
姿勢を変更できるロボットの姿勢検出装置及び方法を開示する。ロボット姿勢検出装置は、複数のモーター、複数の接触センサ、及びロボット制御部を含む。モーターは、ロボットに取り付けられてロボットの動きを検出する。接触センサは、ロボットに取り付けられてユーザー及び物の接触を区別する。ロボット制御部は、モーター及び接触センサを通じて検出される情報に基づきロボットの姿勢を検出する。  (もっと読む)
(もっと読む)
教示装置およびキャリブレーション方法、これらを用いたハンドリングシステム
【課題】ハンドに対するセンサの光軸のずれを求めるキャリブレーション操作を行うための教示装置を提供する。
【解決手段】収納容器あるいは搬送装置の半導体ウェハの載置位置に載置した教示治具11を、ロボット1のハンド上に設けたセンサで検出することによって、前記ロボット1に前記半導体ウェハの位置を教示するために、前記ロボット1で前記教示治具11を所定の位置に載置させ、前記教示治具11を前記センサで検出して前記教示冶具11の位置を推定し、前記教示治11具を載置した教示位置と前記推定値との差を求めることによって前記センサの光軸をキャリブレーションする教示装置24において、前記教示装置24は、高さの異なる少なくとも2つのキャリブレーション用ステーション23から構成されるものである。
(もっと読む)
搬送ロボットシステムのたわみ補正装置
【課題】重力による前後軸の垂直方向へのたわみが大きくなっても、薄板をラックへ挿入するロボットの前後軸、上下軸及び回転軸の動作を停止することなく、薄板をラックへまっすぐ挿入することができる搬送ロボットシステムのたわみ補正装置を提供。
【解決手段】ラック4の基準部材とハンド3の先端との距離を測定するハンド3の先端部に取り付けられた変位検出器7a、又は、ラックの基準部材とハンドの先端との距離を測定する各ラック入口に取り付けられた変位検出器7bを有し、変位検出器7a、7bからの距離情報により、上下軸5及び回転動作軸6の重力によるたわみ量を補正する上下軸5及び/又は回転動作軸6の補正動作量を決定し補正する補正制御回路により、ハンドの先端下面と薄板を格納するラックの基準部材との垂直方向距離dを、薄板2の搬入、取り出しを行う動作中を通じて一定に保つようにした。
(もっと読む)
基板取り扱いロボットの改善した校正方法
加工システムにおけるロボットを校正する方法(500)が提供される。方法は、距離センサ(214)をロボットのエンドエフェクタ(102)に脱着自在に結合すること(502)、及び距離センサをしてセンサ(214)から基板支持体(108)までの距離を計測させること(506)を含む。そして、その距離が選択されたしきい値を満たす又はその範囲内であるかどうかを判定する。距離が選択されたしきい値を満たす又はその範囲内であるときのロボットジョイント位置を記録する。 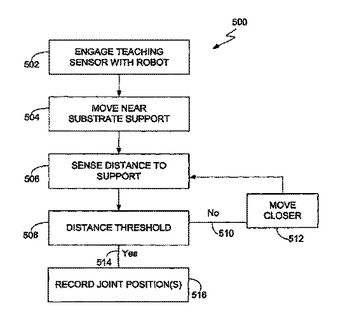 (もっと読む)
(もっと読む)
物品把持装置
【課題】段積みされたコンテナ6の中心O1とハンド4の中心O2との位置がずれている場合でも、簡単に修正して把持できるようにする。
【解決手段】ロボットハンド4に一対のグリッパ12、13を設け、これらグリッパ12、13をそれぞれエアシリンダ14、15によってコンテナ6を把持する位置と開放する位置とに移動可能とし、グリッパ12、13が把持する位置に移動したことを前記エアシリンダ14、15に設けた近接センサ16、17によって検出できるようにする。一対のグリッパ12、13を、コンテナ6を把持する位置に移動させた際に、いずれか一方のシリンダ14または15から検出信号が得られない時には、ロボット2の動作により、ハンド4を信号の得られなかったシリンダ14または15側へ移動させて、両センサ16、17から信号を得られるようにする。
(もっと読む)
伸縮式移載装置
【課題】移載部に設置すべきセンサの配線に起因する断線、パーティクルの問題が発生しない伸縮式移載装置を提供する。
【解決手段】基台1に対して移載部5が水平方向に進出後退する伸縮式移載装置30であって、この移載部5に設置すべきセンサ6A、6Bを無線式とし、このセンサ6A、6Bに電源を供給する充電池7を移載部5に備え、この移載部5が待機位置にあるときに、充電池7を充電する非接触充電手段8を基台1に備えた。
(もっと読む)
ロボットハンド
【目的】本発明が解決しようとする課題は、流体圧を駆動源とし、ワークの二面の位置が常に一定位置で停止する二方向の位置決めが可能なロボットハンドを提供することを目的とする。
【解決手段】本発明は、ケーシングから突出した状態で開閉動作を行う4つのレバーと、ケーシング内に往復動作可能に装着された4つのピストンと、該ピストンの往復動作を前記レバーの開閉動作に変換する4つのリンク部材とを備え、
レバーの開閉動作がピストンの往復動作に対して垂直になるように設定し、
ピストン往復動作と同期作動する1つのレバーと他のレバーとは非同期に作動する構造を備え、
4つのレバーはそれぞれ直角になるように配置し、4つのピストンの内、対面のピストンに関し、片方のピストンを他方のピストンのシリンダ推力より大きくなる構造とし、かつ該ピストンのシリンダストロークを調整できる機構を備える。
(もっと読む)
ロボットの制御装置
【課題】センサによる倣いを行っている際に、センサによる認識率又は認識失敗率を手元でリアルタイムに確認できる手段を備えたロボットの制御装置を提供する。
【解決手段】
ロボットの制御装置10はティーチペンダントTPと、ロボットに設けられる溶接トーチ14、溶接トーチ14に搭載され、作業に先行して作業対象物の形状を認識するレーザセンサLSを有する。又、制御装置10はレーザセンサLSがワークWの形状を認識できた認識率を算出する算出部を備え、ティーチペンダントTPに認識率を表示する液晶ディスプレイが設けられている。
(もっと読む)
物体把持を行うロボット及びロボットによる物体の把持方法
【課題】ロボットによる物体把持動作の正確性を向上させる。
【解決手段】ロボット1は、物体50を把持する手部124を有する腕部12、物体50を撮像してステレオ画像を得るステレオカメラ101、物体50の赤外線反射スペクトルを計測するための赤外線光源125及び赤外線センサ126、ステレオ画像を用いて物体50の形状を推定する形状推定部111、赤外線反射スペクトルを用いて物体50の材質を推定する材質推定部112、並びに、物体50の形状及び材質に適応した腕部12の動作内容を決定する動作計画部115を備える。
(もっと読む)
作業補助装置
【課題】作業者が対象物を移動する作業を補助する作業補助装置を提供する。
【解決手段】作業補助装置100は、把持装置10と、把持装置10を回転軸Qの回りに回転可能に連結する移動装置20を備える。対象物Wは把持装置10と作業者Tにより保持される。作業者Tが対象物Wを回転させると、作業補助装置は、対象物Wの姿勢角と目標姿勢角の偏差が小さくなる方向の回転を対象物に与えると推定される「回転軸の移動方向と移動量」を指定する第1移動指令値を算出する。第1移動指令値に従って移動装置を移動させる。把持装置10と移動装置20は回転可能に連結されているため、回転軸Qが移動する際の対象物Wの回転は回転軸Qと作業者Tの位置関係で規定される。作業者Tは、回転軸Qが移動する際の対象物Wの回転を理解しやすい。作業補助装置は、作業者Tが理解し易いように対象物Wを移動させることができる。
(もっと読む)
ロールを取り扱うロボット
ウェブ材料のロールを取り扱うロボットに関する。該ロボットは、多数の数値制御された軸線に従って可動でありしかも吸引ヘッド(61A)を支持する関節型アーム(60)を有する。 (もっと読む)
ロボット制御装置
【課題】1台の撮像装置を複数のロボットの間で使いまわす場合の作業者の負担を軽減させる。
【解決手段】ロボット制御装置14は、固定的に設置され且つロボットアーム12に接続された制御装置本体20と、制御装置本体20に接続された持ち運び可能な教示操作盤22とを備え、教示操作盤22によってロボットアーム12を操作できるようになっている。教示操作盤22には、撮像装置としてCCDカメラ18を接続するためのカメラ接続用端子30が設けられており、CCDカメラ18によって撮像された画像がカメラ接続用端子30を通して教示操作盤22に直接入力できるようになっている。
(もっと読む)
二軸の力センサを備えたMEMSベース形のマイクログリッパおよびナノグリッパ
広範囲のサイズのマイクロ物品およびナノ物品を把持できかつ二軸の力の検出能力を備えているマイクログリッパの設計およびマイクロファブリケーション法を提供する。グリッピング運動は、1つ以上の電熱アクチュエータにより引起こされる。x方向およびy方向に沿う集積形の力センサは、グリップ力並びに法線方向に沿ってマイクログリッパアームの端部に加えられる力を測定でき、両方ともナノニュートンより小さい分解能を有する。マイクロファブリケーション法は、アクチュエータおよび力センサのモノリシック集積を可能にする。 (もっと読む)
接触提示装置及び方法
【課題】 振動モータを用いて、ユーザに平面または物体表面に触れた感覚を提示する装置を提供する。
【解決手段】 偏心回転子を有する複数の振動モータ10、11を人体に装着し、角速度変化に伴い発生するトルクを、異なるタイミングで皮膚面内に水平な方向に与える。複数の振動モータによりトルクを交互に発生させることにより、ユーザに平面や物体表面を知覚させることができるようになる。
(もっと読む)
ロボット装置
【課題】対象物把持機能を有しているロボット装置について、対象物のハンド部による把持動作をよりスムースに行えるようにする。
【解決手段】アーム部22L、22Rとその先に設けられたハンド部23L、23Rを備え、ハンド部により対象物2を把持する作業を行えるようにされているロボット装置について、対象物の側面を撮影できるようにされた手先センサ24L、24Rを設け、把持作業の過程でアーム部の運動によりハンド部を対象物に対して位置決めした状態で手先センサにて取得する対象物の側面画像に基づいて対象物についての側面情報を生成し、この側面情報を用いてハンド部による対象物把持動作の制御を行えるようにしている。
(もっと読む)
半導体移送装備(Semiconductormaterialhandlingsystem)
【課題】半導体移送装備を提供すること。
【解決手段】半導体移送装備において、ウエハ移送ロボット1000は、フレーム内に装着され、所定の昇降軸に沿って上下移動する昇降部材を含むロボットボディー100と、駆動リンクと複数の被動リンクとからなり、駆動リンクは昇降部材に装着され、被動リンクの末端部はロードポートが装着されたフレーム面に沿って水平方向に線形移動する関節アーム200と、被動リンクの末端部に装着され、垂直の回転軸を中心に回転するスイングユニット300と、スイングユニットに装着されるベース、ベースに装着されて水平方向に直線往復運動する複数のスライディングユニット、およびウエハカセットからウエハを引き出し、収納するウエハハンドを含む直交アーム400とを備える。
(もっと読む)
マニピュレータの移動構造及び手術支援ロボット
【課題】 MRIのガントリ内のようにアームの可動高さが制約された空間内でも、マニピュレータのピボット運動を行えるようにすること。
【解決手段】駆動装置11とロボット本体12とを備えて手術支援ロボット10が構成されている。ロボット本体12は、ほぼ水平方向に動作する第1及び第2アーム36,37を備えている。第2アーム37には、その先端側に設けられたジンバル機構48と、このジンバル機構48に支持されるとともに、マニピュレータMがその軸線方向に移動可能に保持されるスライダー49とを備えている。ジンバル機構48は、アーム36,37の動作に応じて、スライダー49を介してマニピュレータMの姿勢を変化させ、スライダー49は、マニピュレータMの姿勢の変化に伴って、その先端の高さ位置がほぼ一定となるように、マニピュレータMを軸線方向に移動させる。
(もっと読む)
161 - 180 / 230
[ Back to top ]