
Fターム[3C007KX07]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411)
Fターム[3C007KX07]の下位に属するFターム
指、吸着パッドに設けるもの (181)
Fターム[3C007KX07]に分類される特許
121 - 140 / 230
位置合わせ装置及び保持装置
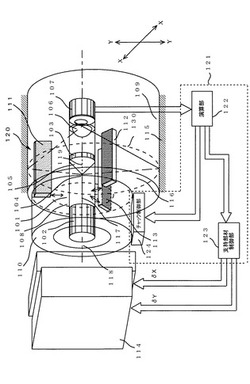
【課題】 複雑な位置合わせであっても精度良く行えるようにすること。
【解決手段】 支持部材110に取り付けられた光発生部101は、光源102が発生した光を、コーンミラー103の頂部104を含む反射部105によって直角方向に反射し、放射状の測定用光130を出力する。光センサ107は、円柱状穴116を有する対象物115の円柱状穴内壁面109で反射した測定用光130を検出して対応する検出信号を出力する。制御部121及び制御装置114は、前記検出信号に基づいて円柱状穴116の中心軸と支持部材110の中心軸との距離が許容値内になるように支持部材110と対象物115の少なくとも一方の位置を制御し、両者の位置合わせが終わった後、チャック120を制御して爪部材111〜113を円柱状穴内壁面109に当接させ、チャック120によって対象物115を保持する。
(もっと読む)
産業用ロボットのハンド装置

【課題】各指毎に各1個のモータを必要とせず、さらに、システムが異常を検出した非常停止時など、ハンド装置への電源を遮断せざるを得ないときも、ハンド装置は把持力を維持することができ、把持しているワークを落下させることがないられない産業用ロボットのハンド装置を提供。
【解決手段】ボールねじ 2の軸方向にフレーム内周にスライド可能に案内されたブロック 4と、ナット16の小径切り込み部15下面とブロックの小径部17下面との間に配置されたスプリング 9(弾性体でもよい)と、スプリング 9の変形を検出するセンサ12と、を有し、サーボモータ 3を作動させることにより各フィンガー 5の他端が開閉動作するようにし、各フィンガー 5の他端がワーク10に当たった後、さらにスプリング 9を変形してセンサ12が作動するまでサーボモータ 3を作動させた後、サーボモータ 3のブレーキ13を作動させた状態でワーク10を把持させるようにした。
(もっと読む)
マニピュレータ
【課題】歯車部品を歯面に当接するガイド鋼球で支持する支持台に効率よく装着する。
【解決手段】ハンド部14は、歯車部品であるワーク16を把持する3個の爪58を有する。3個の爪58のそれぞれが径方向外に向けてにスライドして、ワークの円筒面20に当接し、これを把持する。爪58は、回動自在に支持されたローラ74を有する。ワークは、このローラを介して支持されるため、ハンド部14に把持されている状態であっても回転自在となっている。
(もっと読む)
保持手段駆動装置、その制御方法、及び制御プログラム
【課題】電子部品保持手段を介して電子部品に加える荷重を検出するに際し、荷重センサを使用することにより、リアルタイムで当該荷重を検出することが可能な電子部品保持手段の保持手段駆動装置、その制御方法及び制御プログラムを提供する。
【解決手段】駆動ユニット15は、サーボモータによる送り用の駆動源を備え、この送り用の駆動源のサーボモータの駆動力により操作ロッド15aが電子部品のZ軸方向である上下方向に動作する。この操作ロッド15aには、下端部に荷重センサ15eが装着される。この荷重センサ15eは、サーボモータを通じた操作ロッド15aの下方移動により吸着ノズル11と接触することで当該ノズル11を押し下げる際に操作ロッド15aに加わる荷重、すなわち工程処理部2aに位置決めされる電子部品3に加わる荷重を直接検出する。
(もっと読む)
ロボットのハンド装置
【課題】 狭隘な環境で重量の大きなワークを容易かつ確実に把持することができるロボットのハンド装置を提供する。
【解決手段】 4節リンクを構成する第1リンク手段61と2節を共用して第2リンク手段64を構成し、第1モータM11によって第1リンク手段61を駆動するとともに、第2モータM12によって第2リンク手段64を駆動し、第1把持部63と第2把持部62とを個別に動作するロボットハンドを実現する。
(もっと読む)
ロボット用マニピュレータ
【課題】表面構造を部位によって最適化したロボット用マニピュレータを提供することを課題とする。
【解決手段】ロボット用マニピュレータ1であって、構造部2の表面側に設けられる圧力センサからなるセンサ部3と、少なくともセンサ部3を覆う被覆材からなる被覆部4とを備え、被覆部4は、指先からの距離に応じて厚さ及び/又は硬さの異なった被覆材4a,4b,4c,4eが配置されることを特徴とし、また、センサ部3は、指先からの距離に応じて分解能が異なった圧力センサが配置されることを特徴とする。
(もっと読む)
ロボットハンド
【課題】表面構造を部位によって最適化したロボットハンドを提供することを課題とする。
【解決手段】複数本の指A,B,C,Dを有するロボットハンド1であって、構造部2の表面側に設けられる圧力センサからなるセンサ部3と、少なくともセンサ部3を覆う被覆材からなる被覆部4とを備え、センサ部3及び/又は被覆部4の構成によって細かい作業を行うのに適した特性を持つ指の本数が細かい作業を行うのに適していない特性を持つ指の本数より多い、あるいは、センサ部3及び/又は被覆部4の構成によって把持を行うのに適した特性を持つ指の本数が把持を行うのに適していない特性を持つ指の本数より多いことを特徴とする。
(もっと読む)
物体認識装置およびロボット装置
【課題】距離センサから得られる距離データを用いて、対象物体の三次元的な位置姿勢を認識する。
【解決手段】物体の位置及び姿勢を認識する物体認識装置であって、(1)モデル入力手段と、(2)シーン計測手段と、(3)対応点ペア作成手段と、(4)幾何学的一貫性を有する他の対応点ペアをグループGiに追加する処理を繰り返し、全ての対応点ペアを基準にグループを作成するグループ化手段と、(5)物体の位置姿勢を決定する一致度検証手段と、(6)位置姿勢を補正する処理を繰り返すことで高精度化し、最終的な位置姿勢を算出する高精度化手段を備える。
(もっと読む)
ロボットハンド
【課題】物体を把持するときの安定性と巧緻性とを両立した指を有するロボットハンドを提供することを課題とする。
【解決手段】複数本の指を有するロボットハンド10であって、複数本の指は、指先の物体の把持部分の形状が異なる第1の指A,Bと第2の指C,Dを含み、第1の指A,Bは、指先の先端部の曲率が第2の指C,Dより大きくかつ指先の中央部の曲率が第2の指C,Dより小さく、第2の指C,Dは、指先の先端部の曲率が第1の指A,Bより小さくかつ指先の中央部の曲率が第1の指A,Bより大きいことを特徴とする。
(もっと読む)
ウエハ検出装置及びウエハ搬送装置
【課題】ウエハ搬送用のハンドが180°回転する構成のウエハ搬送装置において、ハンドに設けられたウエハ検出用のセンサ部の検出情報を本体側に支障なく伝達することを可能にする。
【解決手段】ウエハ搬送装置11は、本体13に対して回動軸21を介してハンド14が回動可能に支持され、ハンド14には第1光ファイバ及び第2光ファイバが、その第1端部が本体13と対向する位置で、かつ回動軸21に対して対称位置に配置され、第2端部が載置部19に載置されたウエハに光を出射及び反射光を受光可能に設けられている。本体13には、ハンド14が第1状態又は第2状態に配置された状態において、前記両光ファイバの第1端部の端面と対向する位置に投光部30及び受光部31が配置されている。ウエハの検出手段は、受光部31の受光量に基づいてウエハの検出を行う。
(もっと読む)
センサ装置
【課題】モータにより駆動される機械装置の状態を計測するセンサは、可動部に配置されるためその情報は無線で伝送されることで多くのメリットがある。しかしセンサや無線回路に供給する電源にバッテリを使用すると容量不足や高頻度のバッテリ交換が問題となる。
【解決手段】機械装置102の状態を測定するロボットセンサ装置111において運動エネルギーを電力に変換する発電モジュール104を用いることでセンサ103および無線回路106の電力供給を行う。またバッテリ105を併用することで生成される電力不足を補う。供給源を切り替える手段を持つことで電源の切り忘れや電力不足に対応することができ、安定的な供給や動作を実現することが可能となる
(もっと読む)
ロボット用ハンド及びロボット用ハンドの制御方法並びにロボット用ハンドの制御システム
【課題】把持する対象物の姿勢を変えることなく、対象物を高精度に且つ迅速に把持できるロボット用ハンド、その制御方法並びに制御システムを提供する。
【解決手段】このロボット用ハンド1においては、掌部4にカメラ15が設けられ、カメラ15のレンズ10の光軸10aを中心としてほぼ等距離、等角度の位置に指部5、6、7が開閉可能に取り付けられ、指部5、6、7の指先は、対象物を把持するために折り曲げたときにレンズ10の光軸10a上で互いに接触可能とされ、光軸10a上に指部5、6、7の把持中心17が設けられている。
(もっと読む)
姿勢制御方法および姿勢制御装置
【課題】簡易な制御により、丸管の処理面に対し、処理手段の姿勢を所望の姿勢で臨ませることができる姿勢制御方法および姿勢制御装置を提供する。
【解決手段】処理手段と、処理手段により処理が施される丸管の処理面と、の間の距離を4つの距離計測手段により計測して、処理手段の姿勢を制御する姿勢制御方法であって、第1計測距離から第2計測距離を引いた差分と、第3計測距離から第4計測距離を引いた差分とに基づいて、ピッチ軸周りの姿勢を制御し、第1計測距離から第3計測距離を引いた差分と、第2計測距離から第4計測距離を引いた差分とに基づいて、ヨー軸周りの姿勢を制御し、第2計測距離および第3計測距離を合算した第1合算距離と、第1計測距離および第4計測距離を合算した第2合算距離との差分とに基づいて、ロール軸周りの姿勢を制御する。
(もっと読む)
ワーク運搬装置
【課題】回動可能なアームに連結されたフレームと、そのフレームに支持された第1乃至第3のクランプ装置とを有し、その第1乃至第3のクランプ装置によってワークを把持して運搬するワーク運搬装置において、1台のワーク運搬装置によって、各種形態のワークを運搬できるようにする。
【解決手段】第1及び第2のクランプ装置9,9Aを互いに接近又は離隔可能にフレーム7に支持すると共に、第3のクランプ装置9Bを、第1及び第2のクランプ装置9,9Aのクランプ爪14,14Aを結ぶ直線Lに対して、直交する方向に移動可能にフレーム7に支持する。
(もっと読む)
複数のウェハを取り扱う能力を備えた受渡し機構
一体化されたロボット機構は、搬送機器を改善し、対象物移動を、アライメント又は識別等の別の機能と一体化するために開示されている。開示された一体化されたロボットアセンブリは、複数の加工物を移動させるための多重エンドエフェクタと、1つの加工物を移動させるための単一エンドエフェクタと、アライメント能力を提供するためのロボットボディに組み込まれた回転チャックと、搬送中に対象物を識別するための選択的な識別サブシステムとを有することができる。本発明のロボットアセンブリは、ソータ又はストッカ機器において、処理機器において、及び受渡しシステムにおいて使用されることができる。 (もっと読む)
把持制御装置
【課題】任意形状の物体を確実に且つ効率良く把持することができるロボットハンドの把持制御装置を提供する。
【解決手段】この把持制御装置7は、画像認識ユニット10と、ロボットハンド制御ユニット11と、複数のモータドライバ12とを有している。画像認識ユニット10は、物体上の目標接触点の座標を決定し、目標接触点における法線ベクトルを求める。ロボットハンド制御ユニット11は、指先部上の任意点の中から目標接触点における法線の方向と沿う方向の法線を有する候補接触点を求め、更に、その目標接触点と候補接触点とが実質的に接するような目標関節角度を求め、その目標関節角度に応じた関節角度指令値を作成する。各モータドライバ12は、関節角度指令値に応じて各モータ5を駆動制御する。
(もっと読む)
把持位置姿勢決定システムおよび把持位置姿勢決定方法
【課題】把持位置姿勢がアームおよびハンドの可動範囲外となるのを可及的に避けることを可能にする。
【解決手段】位置姿勢計測センサによって計測された把持対象物の位置姿勢およびデータベースに格納された前記把持対象物の形状情報に基づいて、前記把持対象物に関する把持位置姿勢が、少なくとも2つの関節を有するアームおよび前記アームの先端に設けられた把持機構の可動範囲外である否かを判定するステップと、前記アームおよび前記把持機構の可動範囲外である場合に、前記把持位置姿勢を修正することにより前記アームおよび前記把持機構の可動範囲内に修正された把持位置姿勢が存在するか否かを演算するステップと、存在する場合に前記修正された把持位置姿勢となるように前記アームおよび前記把持機構を制御するステップと、を備えたことを特徴とする。
(もっと読む)
ハンドリング装置
【課題】視覚センサを要せずに、把持前の予備計測と、把持後の本計測を実行できるハンドリング装置。
【解決手段】パラレルリンク型ロボットのアーム先端に、光電センサを設ける。Z位置が既知の載置面上に仮止めされたワークWの2辺について、センシングビームBMをよぎらせ、よぎり時のロボット位置・姿勢から、ワークWの仮止め位置(2次元)を求める。基準仮止め位置・姿勢とのずれを補償するロボット位置・姿勢の補正を行い、ワークWを把持/ピックアップする。次いで、把持されたワークWの複数辺または複数コーナを、既知の突き当て辺または突き当て面に突き当て、その際のロボットの位置・姿勢を用いて把持位置・姿勢を求め、基準把持位置・姿勢とのずれを補償するロボットの位置・姿勢の下で別ワークへの組み付けを行う。
(もっと読む)
把持ロボット装置
【課題】 1台のハンドでさまざまな硬さ、重さ、形状のものを把持する機構と制御法を提供する
【解決手段】識別情報が記録されたICタグを複数の物体にそれぞれ貼着し、前記各物体を自動的に識別して前記各物体を把持するロボットマニピュレータの把持ロボットハンドであって、把持ロボットハンドの中心位置に取り付けたCCDカメラと、同CCDカメラの近接位置に取り付けた照明装置と、前記各物体のICタグに記録された情報を読取るICタグリーダと、同ICタグリーダが読取った物体の形状情報及びその把持位置に基づいて、前記把持ロボットハンドの把持部を識別した前記各物体の把持位置に移動させる第1のアクチュエータと、同第1のアクチュエータの作動後に、前記把持ロボットハンドの把持力を前記物体のICタグに記録された把持力と比較して一致させる第2のアクチュエータとから構成されることを特徴とする把持ロボット装置である。
(もっと読む)
産業用ロボット
【課題】把持対象ワークの異種形状や寸法違いや高さがばらつく場合を含む多数のワークをすくいあげるように把持することができ、かつフィンガーの先端が水平方向に同じ軸方向高さの位置でワークを掴むことができるハンド装置を有する産業用ロボットを提供すること。
【解決手段】少なくとも2個のフィンガーを有しかつ少なくとも2個のフィンガーが開閉する際、すくいあげるように求心動作を行い、かつエンコーダーの検出角度θに対応して、ロボットを作動させてアーム21先端に支持されたハンド装置30を補正量だけ垂直方向Y軸方向に移動させて各フィンガーの先端が同じY軸方向高さでワークを掴むようにした。
(もっと読む)
121 - 140 / 230
[ Back to top ]