
Fターム[3C007KX07]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411)
Fターム[3C007KX07]の下位に属するFターム
指、吸着パッドに設けるもの (181)
Fターム[3C007KX07]に分類される特許
41 - 60 / 230
ロボットの把持装置
【課題】ロボットの組立作業において、ワークの把持動作を確実に行う。
【解決手段】把持部材2a、2bの間にワークWを把持する工程において、各把持部材2a、2bに設けられた接触押圧部21a、21bがワークWを押圧して把持することによって発生する光学縞を検出して、把持力の制御を行う。このとき、把持部材2aに設けられたワーク有無検出部22aがワークWに接触することによって発生する光学縞を検出することで、把持部材2a、2bの間にシート状のワークWが有ることを確認する。
(もっと読む)
ロボットアームの制御プログラム及び制御システム

【課題】ハンド部を適切な位置に停止させることができるロボットアームの制御プログラムを提供する。
【解決手段】本発明に係るロボットアームの制御プログラムは、ロボットアームのハンド部を、把持対象物に向かって移動させる処理と、ハンド部に設けられた距離測定部に、ハンド部と把持対象物との距離を測定させる処理と、距離測定部がハンド部と把持対象物との距離の測定が不能となると、測定不能となる直前のハンド部と把持対象物との距離と、ロボットアームの関節部の角度から算出させた、測定不能となった後のハンド部の移動距離と、に基づいて、ハンド部と把持対象物との距離を推定させる処理と、推定させたハンド部と把持対象物との距離が閾値以下となると、ハンド部を把持対象物に向かって移動させる動作を停止させる処理と、をコンピュータに実行させる。
(もっと読む)
ハンド装置
【課題】比較的簡素な構成でワークとハンド部との相対位置を検出することにより、ワーク把持動作の高速化を実現することのできるハンド装置を提供すること。
【解決手段】ロボットアーム200のハンド450に位置検出装置10を付加して位置検出機能付きのハンド装置400を構成する。位置検出装置10は、検出領域10Rに向けて位置検出光L2を出射する複数の発光素子12を備えた位置検出用光源部11を有しており、検出領域10Rに位置検出光L2の強度分布を形成する。また、検出領域10Rで反射した位置検出光L3は光検出器30で受光され、その受光結果に基づいて、位置検出部50は、ワークObとハンド450との相対位置を検出する。
(もっと読む)
ロボット
【課題】目標とする位置に処理装置を素早く且つ正確に位置させ、所望の処理を行わせることができるロボットを提供する。
【解決手段】対象物Eを把持する把持部10と、対象物Eと把持部10とを相対移動させるアーム20と、把持部10に働く慣性力および対象物Eに働く慣性力の差分を検出する慣性センサー40と、アーム20を制御して把持部10を対象物Eに向けて相対移動させるとともに、慣性センサー40の検出結果を用いて把持部10と対象物Eとの間の相対位置のずれを演算し、演算結果に基づいてアーム20を制御して、ずれが相殺されるように把持部10と対象物Eとの間の相対位置を調節する制御装置60と、を有することを特徴とする。
(もっと読む)
ロボットシステム
【課題】カメラをハンドに内蔵しながらも、より広範囲にある物品を検出して把持することができるロボットシステムを提供する。
【解決手段】物品を把持するハンドと、ハンドを回転駆動させるアームと、ロボットの動作を制御するコントローラと、ハンドに内蔵され、アームにより回転されるハンドの回転軸に対して撮像方向がオフセットするように配設されたカメラと、カメラにより取得された画像情報を処理してコントローラに信号を送信する画像処理装置と、を有して構成する。
(もっと読む)
非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置
【課題】測定対象物の位置・姿勢を直接測定して、精度の高い位置・姿勢の測定及び制御を可能にするとともに、測定対象物の位置・姿勢を非接触で測定することでモデル化を簡略にし、モデル化に起因した誤差を小さくすることを可能にした非接触型位置・姿勢測定方法及び非接触型位置・姿勢測定装置並びにこれを備えた半導体実装装置を提供する。
【解決手段】エンコーダ10の位置検出器15と距離計16、17が取り付けられた測定装置2と、測定対象物9に取り付けられたエンコーダ10のスケール11とを備えてなる非接触型位置・姿勢測定装置Bを用い、距離計16、17によって位置検出器15とスケール11の間隔及び平行度を測定し、間隔と平行度が一定となるように測定装置2のマニピュレータ13を制御し、測定装置2の位置情報と距離計16、17の計測値とエンコーダ10の計測値とを用いて測定対象物9の位置と姿勢を測定する。
(もっと読む)
ロボットアーム制御装置、その制御方法及びプログラム
【課題】安全性を向上させたロボットアーム制御装置、その制御方法及びプログラムを提供すること。
【解決手段】ロボットアーム制御装置1は、複数の関節部を有するロボットアーム2と、ロボットアーム2に対して作用する外力を検出する外力検出手段と、外力検出手段により検出されたロボットアーム2の外力に基づいて、ロボットアーム2のインピーダンス制御を行う際の位置補正量を算出する位置補正量算出手段と、ロボットアーム2の移動目標位置を指定するための手先位置指令値を生成する指令値生成手段と、位置補正量算出手段により算出される位置補正量と、指令値生成手段により生成された手先位置指令値と、に基づいて、ロボットアーム2の各関節部の駆動を制御する駆動制御手段と、を備えている。指令値生成手段は、位置補正量算出手段により算出される位置補正量が所定量以下になるまで、手先位置指令値の生成を停止する。
(もっと読む)
コンロッドのクランプ装置
【課題】コンロッドを加工装置で機械加工する際に、様々な車種に対応するために形状や大きさの異なるコンロッドであっても簡易な構成でクランプすることができる、コンロッドのクランプ装置を提供する。
【解決手段】本実施形態に係るクランプ装置10は、取付け部20に固定された状態で前方に延出する棒状の支持部31と、該支持部31に連結された状態で同じく前方に延出する棒状の可動部51とを備え、支持部31及び可動部51に、位置決め機構、大端部クランプ機構、小端部クランプ機構、第一の駆動機構等の各機構が配設される。
(もっと読む)
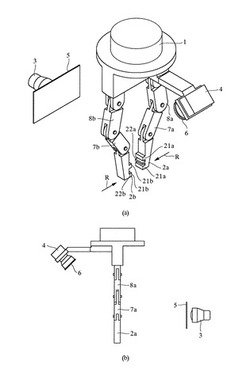
ロボットハンド
【課題】付加ビジョンセンサが不要でコンパクトであり、暗闇の中でもすべりによる落下することなく、把持することができるロボットハンドを提供する。
【解決手段】指部を屈曲させることで物体を把持するロボットハンドであって、手掌部または指部に設けられた接触検出手段と、検出結果に応じて駆動部を制御する手段を有し、検出手段は、物体に光を照射する光源と、物体の光が照射された部位の画像情報を取り込むべく光を集光するレンズを具備したイメージセンサと、上記レンズの焦点を変化させるレンズ移動機構と、取り込んだ画像情報の差分に基づいて、物体の相対的な移動量を演算する演算手段と、を有し、レンズの焦点と物体の位置との一致・不一致を判断して手掌部または指部と物体との接触を検出するとともに物体の外形形状を検出し、かつ、物体表面の相対的な移動量を演算する手段と、を有して構成する。
(もっと読む)
ロボットハンド
【課題】ワークチャック装置のチャック位置にワークを自動で精度良くセットできるロボットハンドを提供すること。
【解決手段】ロボットアームに装着されるものであって、3個以上のハンド爪14によりワーク10の内周又は外周を把持し、ワークチャック装置のチャック位置にワーク10を挿入させるロボットハンドにおいて、3個以上のハンド爪14に把持されたワーク10が軸心を中心とする回転方向に外力を受けた場合に、ワーク10を自由に回転させる自由回転機構を有する。
(もっと読む)
電動ハンド
【課題】電気を駆動源とした電動ハンドにおいて、小型で消費電力が少なく、使い勝手の良い電動ハンドを提供することを目的とする。
【解決手段】電磁ソレノイドを用いたハンドの駆動部と、一対のマスタージョウが開閉動作を行う把持部と、ソレノイドの動作を把持部の開閉動作に変換する変換部を備えたソレノイドハンドにおいて、電磁ソレノイドは磁石を内蔵してプランジャーを吸引保持するラッチ式ソレノイドを構成し、プランジャーの位置はソレノイドが吸引保持した時に把持部が開き位置になるように配置し、把持部の閉じ位置から開き位置までをソレノイドの吸引力で駆動して吸引保持し、開き位置から閉じ位置まではスプリング機構部のスプリング力で駆動し、ソレノイドの吸引力及び吸引保持力をスプリング力よりも大きく設定したソレノイドハンドを構成する。
(もっと読む)
可動軸の位置管理装置
【課題】安価かつ簡単な構成でありながら、可動軸の位置・姿勢を精度良く管理することができる位置管理装置を提供する。
【解決手段】可動軸の位置管理装置20は、光束BLを照射する投光手段21と、光束BLを拡散反射させる反射手段22と、反射光を受光してその光量を出力する受光手段23と、受光手段23からの出力値に基づいて、基準位置からのツール12のズレ量を検出する検出手段としてのセンサアンプとを備える。投光手段21は、静止体としての架台6に取付けられ、反射手段22及び受光手段23は、複数の可動軸を連結して構成されるロボットアーム11先端に設けたツール12に取付けられる。
(もっと読む)
把持装置
【課題】変形し易く強度が弱い段ボール箱のようなワークの変形を最小、確実に保持し、ワーク寸法に応じて確実にワークを把持することのできる把持装置を提供。
【解決手段】把持装置1は、ロボットのアーム先端22に取り付けられた水平角枠2と、短辺側から垂下し把持平面4を有する固定把持部3と、他方側に移動部5と、移動部から垂下する把持平面7を有する移動把持部6と、移動部に設けられた検出移動部9と、検出移動部を付勢するスプリング12と、検出移動部から垂下する接触平面11を有する検出板10と、検出板の接触平面と把持部の把持平面との差が所定量以下になった時に信号を出力する検出器13と、を設け、さらに、移動及び固定把持部の下部に互いに相手側方向に延出する爪3e,6eを設けた。
(もっと読む)
ロボットの操作方法及びロボット操作用デバイス
【課題】ワークをツールでグリップしたロボットを、操作者がワークを直接動かすのと同じ感覚で操作すること。
【解決手段】ロボットのグリッパ17でグリップしたワーク21の対向する2面に、着脱ユニット63の吸着盤63aを用いてロボット操作用デバイス60のベース61をそれぞれ固着する。ベース61に力覚センサ65を介して取り付けられた各ロボット操作用デバイス60の操作ハンドル67を両手で把持した操作者が、ワーク21を動かす操作力を各操作ハンドル67にそれぞれ加える。各操作力を方向別に力覚センサ65で検出してその検出信号をロボットの制御装置に出力し、制御装置は検出信号に基づいてロボットを動作させる。
(もっと読む)
搬送ロボット装置および搬送ロボット装置の制御方法
【課題】慣性力および振動により液体などの搬送物がこぼれない搬送ロボット装置を提供する。
【解決手段】移動体と、移動体に設けられたアーム部と、アーム部を動作させるアクチュエーターと、アーム部の先端に取り付けられ搬送物が載置される搬送物載置部と、を有する搬送ロボット装置1であって、搬送物載置部の姿勢およびアーム部の振動を制御するためにアクチュエーターの動作を制御する制御部40と、搬送物載置部の加速度を検出する加速度検出部20と、アーム部の振動を検出する振動検出部30と、を備え、加速度検出部20にて検出された信号に基づいて搬送物載置部の姿勢を制御し、振動検出部30にて検出された信号に基づいてアーム部の振動を制御する。
(もっと読む)
ロボット制御装置
【課題】作業員から対象物が直接見えなくても、操作子の操作により駆動されるロボットにグリップされたワークを、対象物に組み付け易い姿勢置に移動させ易くする。
【解決手段】ワーク101を挟持するツールのグリッパ付近の測距センサ5g,5h,5iにより、センサ付近のワーク101とボード201との距離をそれぞれ計測し、基準距離との差を、操作者が操作する操作レバーと共に操作装置に設けた液晶表示器等において報知する。また、ワーク101の各箇所とボード201との各距離が全て基準距離又は基準距離に対して基準範囲内の差に収まったならば、ワーク101がボード201に対して組み付け可能な姿勢に姿勢合わせされたことを液晶表示器等で報知する。
(もっと読む)
ロボット及び物品搬送システム
【課題】機能を維持しながらもより小型化することができるようにした、ロボット及び物品搬送システムを提供する。
【解決手段】アーム部材23と、アーム部材23を揺動させるアクチュエータ22と、アーム部材23の先端に設けられるハンド部材24と、アーム部材23とハンド部材24とを回転可能に連結する関節部材と、アクチュエータ22を支持し直線駆動するリニアアクチュエータ3と、アクチュエータ22及びリニアアクチュエータ3を協働させての各ハンド部材を進退方向に直線移動させるコントローラとを有して構成する。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がより安定に把持されるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】物体がハンド1により把持されることによって複数の指機構11〜15および手の平部10のそれぞれに当接している状態において、複数の指機構11〜15のそれぞれから当該物体にかけられる荷重が調節されうる。これにより、手の平部10における荷重中心p0の位置が目標手の平領域PAに含まれるように変位されうる。また、手の平部10にかかる荷重f0が目標荷重範囲FAに収まるように調節されうる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】物体がその載置箇所から安定に持ち上げられるようにハンドの動作を制御することができるシステム等を提供する。
【解決手段】ハンド1が有する第1種の指機構11〜13の動きにより物体がつままれた上で、この物体の一部を載置箇所に当接させたままで他の部分が持ち上げられる。さらに、手の平部10の位置および姿勢が制御されることにより、手の平部10と物体との当接箇所が広げられる。そして、複数の指機構11〜15の動きが制御されることにより当該複数の指機構11〜15により物体が握られる。
(もっと読む)
ロボットハンドならびにその制御システム、制御方法および制御プログラム
【課題】配管等の配置の自由度を高めながら、指機構の動作を安定に制御することができるシステム等を提供する。
【解決手段】ハンド1によれば、配管33に流体の圧力に応じた断面積変化が許容される程度の柔軟性を持たせ、これによって配管33およびこれを介して連結されているマスタシリンダ31の配置自由度を高めることができる。また、配管33中の流体圧力に応じて生じる配管33の断面積変化が考慮されるので、スレーブピストン位置Pxが高精度で測定されうる。
(もっと読む)
41 - 60 / 230
[ Back to top ]