
Fターム[3C007KX07]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411)
Fターム[3C007KX07]の下位に属するFターム
指、吸着パッドに設けるもの (181)
Fターム[3C007KX07]に分類される特許
21 - 40 / 230
ロボットの制御装置およびロボットを制御する方法
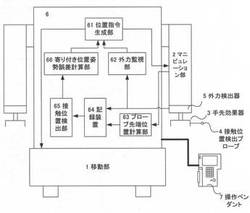
【課題】ロボットがラフな寄り付きでそのまま精密な作業をすることができるための作業教示データ修正方法、および装置を提供する。
【解決手段】ロボットが行うべき作業対象物に対する作業手順を記憶する作業手順記憶手段と、再生時のロボットと作業対象物との相対的位置及び相対的姿勢が、別の位置及び姿勢となったことを位置・姿勢検出手段によって検出したことに応じて、位置及び姿勢の変化量を獲得し、算出値に基づいて作業手順を修正する作業手順修正手段とを備え、修正される作業手順が、接触状態検出手段によって検出された作業対象物の位置及び姿勢をもとに得られる、ロボットを基準とした座標から作業対象物を基準とした座標への同次変換行列を用いてロボットを基準とした座標上での作業手順として与えられる、ロボットの制御装置。
(もっと読む)
ロボットの教示手順校正装置および方法

【課題】ロボットの特徴である高速性を失わずに作業対象物に接触するとともに接触位置検出し、エンコーダ分解能程度のサブミリ単位の高精度検出することで、高速高精度なロボットの作業座標系のキャリブレーション(校正)方法を提供する。
【解決手段】弾性変形領域を持ったプローブを用いて、位置姿勢誤差発生前後において接触位置検出処理を所定回数繰り返すことで、ロボット座標に対する作業対象物の位置姿勢を算出し、位置姿勢誤差を計算し、位置誤差発生前の教示データを修正するという手順で処理する。
(もっと読む)
電動チャック
【課題】電動アクチュエーター或いはメカニカルチャックが故障した場合に部品交換が容易であり、汎用性が高く、メカニカルチャックにおけるフィンガーのワークに対する芯出し作業を手動で簡単に行える電動チャックの提供。
【解決手段】モータ9と、その回転出力軸に回転が止められて螺合した直動出力軸11とを備えた電動アクチュエーター3に、プッシャー22が押圧されることによりワーク把持用のフィンガー35が開かれ、プッシャー22が押圧されていない時はバネの力でフィンガー35が閉じるメカニカルチャック4を着脱可能に取り付けてある。回転出力軸に直動出力軸11を軸方向に調整できるハンドル19を固定する。ハンドル19は放熱部材を兼ねたアルミ合金製とすることがある。
(もっと読む)
自動溶接方法及び装置
【課題】 母管に複数の枝管を溶接する溶接処理に要する時間を低減させる。
【解決手段】 母管1の長手方向に延びるガイドレール12に、多関節ロボット14に枝管溶接機4を備えた溶接モジュール13と、別の多関節ロボット16にセンサ装置17を備えたセンシングモジュール15を、独立に往復動可能に取り付ける。母管1に、複数の枝管2a〜2nを取り付ける場合は、母管1の長手方向一端側より他端側へ並ぶ各枝管2a〜2nについて、センシングモジュール15のセンサ装置17によるセンシング作業を順次行ない、それぞれの位置計測結果の情報を制御装置18に一旦記憶する。センシングモジュール15による溶接順序が後の枝管2b〜2nについてのセンシング作業と並行して、溶接モジュール13により、制御装置18より得た位置計測結果の情報を基に枝管溶接機4の位置を制御しながら各枝管2a〜2nの母管1への溶接作業を行わせる。
(もっと読む)
ロボットハンド
【課題】把持部の形状が異なる複数種類のワークを別々に把持する場合に、作動を中断することなくかつ部品を交換することなく、ワークの把持部を把持することができ、かつ把持部の形状が大きくことなっても対応でき、使用していない部分がワーク等に干渉するおそれが少ないロボットハンドを提供する。
【解決手段】把持部5aの形状が異なる複数種類のワーク5を別々に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。1対の爪12の少なくとも一方は、長手方向の異なる位置に、複数種類のワークA、B、Cの把持部に、それぞれ対応した形状の複数の凹溝12a、12b、12cを有する。
(もっと読む)
開閉チャック
【課題】ワークの把持を正確に検出することが可能な開閉チャックを提供する。
【解決手段】爪によりワークを把持する開閉チャックであって、ガイドレールを有するガイド部材と、ガイドレール上を摺動するよう設置され、爪を取り付け可能な第1及び第2のスライダと、第1及び第2のスライダが互いに離間又は接近するよう、第1及び第2のスライダを摺動させる駆動源と、ガイド部材において、第1及び第2のスライダに取り付けられた爪がワークを把持した際にひずみが生じる位置に取り付けられたひずみセンサと、を備える開閉チャック。
(もっと読む)
ロボット、及びその制御方法
【課題】被誘導者を適切に誘導することができるロボット、及びその制御方法を提供すること。
【解決手段】本発明の一態様にかかるロボットは、ハンドを有する腕部と、脚部と、胴体部と、を有し、人201を誘導して移動するロボットであって、所定のロボット位置におけるハンドの目標位置とハンドの測定位置との偏差に応じて、ロボットに対する被誘導者の追従状態を推定する追従状態推定部136と、追従状態の推定結果に応じて、ロボットの移動速度を調整する歩行調整部137と、歩行調整部137によって調整された移動速度に応じて前記ロボットを移動させるよう、脚部を駆動する駆動制御部138と、を備えたものである。
(もっと読む)
レーザー加工表示装置及びこれを用いたロボットの教示方法
【課題】レーザー加工の教示作業を迅速に行うことができるレーザー加工表示装置及びこれに用いたロボットの教示方法を提供すること。
【解決手段】レーザー加工表示装置1は、ロボット7のエンドエフェクタ72に装着して加工用レーザー光Aを照射するレーザー加工手段2と、被加工対象8に測長用レーザー光Bを照射して、測長用レーザー光Bの出射位置311から被加工対象8までの距離を計測する測長手段31と、加工用レーザー光Aの出射位置231から被加工対象8における各部までの距離を算出し、被加工対象8の表面断面形状を特定する算出手段と、表面断面形状82を表示すると共に、表面断面形状における各部が加工用レーザー光Aの焦点距離の調整可能範囲T内に入るか否かを表示する表示手段を備えている。
(もっと読む)
ロボットハンド
【課題】 直径の異なる円筒形部分を有するワークの前記円筒形部分をその径方向に把持する場合に、円筒形部分の直径が大きく異なっても、作動を中断することなくかつ部品を交換することなく、ワークの把持部を安定して把持することができるロボットハンドを提供する。
【解決手段】 直径の異なる円筒形部分5aを有するワーク1の円筒形部分をその径方向に把持するロボットハンド10。長手方向に延びる1対の爪12と、爪の間隔を開位置と閉位置の間で開閉するチャック装置14とを備える。爪12は、チャック装置により開閉される開閉部材12aと、開閉部材に爪の長手方向に伸縮可能に取り付けられた先端部材12bと、先端部材を爪の長手方向に伸縮させるアクチュエータ12cとを有しており、開閉部材12aと先端部材12bは、ワーク1の円筒形部分5aに接触してこれを把持する互いに交差する把持面13a,13bをそれぞれ有する。
(もっと読む)
自動位置ずれ補正方法、及び自動位置教示方法。
【課題】
フィンガ部が水平面内で回転方向にずれて取り付けられていても、最適な位置教示データが自動で取得できる位置教示方法を提供する。フィンガ部の位置ずれ量を検出して、このずれ量を補正して、最適な位置に被搬送物を搬送できる位置教示方法を提供する。
【解決手段】
搬送ロボットが移動可能なX軸方向に対し平行に備えられた第1、第2の目的物を検出することで搬送ロボットの中心位置を特定し、その後、第3の目的物を検出する。これらの動作で得られた位置データから最適な搬送位置を自動で教示する。
(もっと読む)
基板搬送装置及び基板搬送方法並びに記憶媒体
【課題】基板載置部から基板を受け取ったときに基板の姿勢が異常な状態であるか否かを確実に検出すること。
【解決手段】前記フォーク3Aを基体31に沿って前進させ、ウエハWを保持する突き上げピン73に対して上昇させることにより、当該突き上げピン73上のウエハWをフォーク3Aに受け取る。このときに前記保持爪30A〜30Dの各々に設けられた歪みセンサ4A〜4Dにより、保持爪30A〜30Dに上から荷重が加わったときの当該保持爪30A〜30Dの歪み量を検出する。各々の歪みセンサの歪み量に基づいて、ウエハWの姿勢が正常であるか否かを判断し、ウエハWの姿勢が異常であると判断したときに、前記フォーク3Aの後退を禁止する。
(もっと読む)
ロボットハンド
【課題】把持体を回転させるための駆動源を定位置に設置することができ、被把持物配置予定位置周りで把持体を無制限に回転させることのできるロボットハンドを提供する。
【解決手段】把持体61を移動させる第一駆動部62と、把持体を回転させる第二駆動部63とを備え、第一駆動部は、スライドシャフト64と、駆動源の出力でスライドシャフトを軸線方向に往復動させるスライド手段65と、先端部に把持体が連結された回転レバー66と、回転レバーを回転可能に支持し、所定位置に位置した状態でスライドシャフトの一端部周りで回転自在に設けられた支持体67とを備え、第二駆動部は、駆動源の出力を支持体に伝達し、支持体をスライドシャフト周りで回転させる伝達機構とを備え、スライドシャフトは、支持体に支持された回転レバーの基端部を収容する無端円環状の溝が形成されている。
(もっと読む)
ロボットハンド及び搬送ロボット
【課題】被搬送物Wがロボットハンド9から落下することを回避して、被搬送物Wの搬送作業の煩雑化を十分に抑えること。
【解決手段】ハンド本体11に設けられかつ真空圧を利用して被搬送物を吸着する複数のベローズ型吸着パッド19と、吸着状態における各ベローズ型吸着パッド19の軸長を測定する軸長センサ29と、各軸長センサ29から測定された各ベローズ型吸着パット19の軸長に基づいて、搬送中における被搬送物Wの姿勢を判定するコントローラ31と、を備えたこと。
(もっと読む)
アーム駆動機構、及びこれを備えたマニピュレータ
【課題】先端部に作業ツールが装着されるアーム機構を大型化させることなくアーム機構を姿勢変更させることのできるアーム駆動機構及びこれを備えたマニピュレータを提供する。
【解決手段】アーム駆動機構は、一対の回転体と、両回転体に掛け渡される無端環状体と、駆動モータにより回転されるスクリューシャフトと、スクリューシャフトに螺合され、無端環状体の一部が固着されたスライダとを備え、他方の回転体が一方の回転体よりも小径に設定され、無端環状体の回転体間にある二つの対向部のうちの一方の外周側が巻き掛けられて他方の回転体側にある対向部を平行にするアイドラを備え、スクリューシャフトが一方の対向部の外周側と対向するように配置されている。
(もっと読む)
基板搬送用装置
【課題】 基板保護、装置保護のための基板有無検出、および衝突検出を小型、低コストな1つのセンサにて精度よく検出し、基板の大型化に対する鉛直方向の振動についても同時に低減できる基板搬送用装置を提供する。
【解決手段】 エンドエフェクタに取り付けたひずみセンサと、ひずみセンサ出力から基板有無を検出する基板有無検出部と、衝突有無を検出する衝突有無検出部と、鉛直方向の振動を低減する振動低減部を備える。
(もっと読む)
トレイ移載装置及び方法
【課題】簡単な構造で、トレイの有無やトレイ高さを検出することができるトレイ移載装置及び方法を提供する。
【解決手段】複数の積載スペースa,b,cにそれぞれ段積み可能な複数のトレイ10と、トレイに設けられたトレイ把持部11とトレイ上に積載されたワーク1を把持可能なハンド12と、ハンドに取り付けられトレイをその上方から撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、カメラで撮影した画像を画像処理してロボットを制御するロボット制御装置20とを備える。各積載スペースの上方から撮影した画像5に基づき、最上段のトレイ把持部11の位置及び姿勢と、各積載スペースのトレイ10の段積み数とを計測し、これに基づき最上段のトレイ10の移載及び最上段のトレイ上のワーク1の移載を行う。
(もっと読む)
コネクタ自動挿抜装置
【課題】 多数のRFコネクタを有した供試体において、予め手作業でRFコネクタに終端器を装着することなく、複数のRFコネクタに対して終端器を自動挿抜してRFコネクタのRF特性計測を行うコネクタ自動挿抜機構を得る。
【解決手段】 終端器及びRFコネクタの端末位置を計測する画像処理装置と、終端器を保持器から取り出して把持する把持部と、把持部を3次元方向に移動させる駆動部を有したロボットハンドと、計測用ケーブルを3次元方向に移動可能な計測用ハンドと、ロボットハンドにおける把持部の把持または解放動作、およびロボットハンド及び計測用ハンドの移動動作を制御する制御装置とを備える。
(もっと読む)
アーク溶接ロボットの制御装置及びプログラム
【課題】溶接線倣いが適用できないワークに対しても溶接トーチの少なくとも狙い角のトーチ姿勢の自動調整ができ、ロボット言語プログラミングが不要となり、1つの命令により、数値指定に基づいて所望のトーチ姿勢が得られるアーク溶接ロボットの制御装置を提供する。
【解決手段】制御装置10は、1つの指令に応じてマニピュレータM1を駆動制御し、指定距離に基づいてレーザ変位センサLSを、第1センシング点から第2センシング点に移動させる。制御装置10は指令に応じてレーザ変位センサLSが取得した両センシング点の検出結果に基づき溶接線座標系を演算し、溶接線座標系に基づきマニピュレータM1の位置・姿勢を演算し、位置・姿勢に基づき逆演算してマニピュレータM1の各軸角度を求め記憶する。
(もっと読む)
ウェハー搬送ロボット、及び、それを備えた基板処理装置
【課題】ウェハーアライメント・オリフラ合わせ機構を備えるウェハー搬送ロボットであり、ウェハー搬送ロボットの本来有する機構および制御系を利用して当該機構を簡素に構成でき、センサユニット取付け部を配置する必要のないウェハー搬送ロボット、及び、ウェハー搬送ロボットを備えた基板処理装置を提供することを目的とする。
【解決手段】ウェハー搬送ロボットの駆動機構より延設された支柱を軸として動作する第1アームの上方にウェハーのセット箇所を固定配置し、かつ、第1アームにはセンサを配設させ、ウェハーチャックによりウェハーをセンサ上に移動させてセンサとウェハーの位置を合わせてから該センサでセンシングを行い、この状態から駆動機構により支柱を昇降させてウェハーをセット箇所に載置させ、支柱を軸に所定の角度に回転させることによりウェハーのオリフラ合せを行うオリフラ合せ手段を具備した構造を有する。
(もっと読む)
自動機による位置出し方法及び自動機の位置出し装置
【課題】 安価で正確且つ迅速に位置出しを行なうことができる自動機による位置出し方法及び自動機の位置出し装置の提供。
【解決手段】 X軸方向へ移動し、且つθ方向へ旋回するアーム1と、当該アーム1の旋回面に対して平行であり、且つ略平坦な作業テーブル2を備え、アーム1の先端部に作業テーブル2へ向けたチャック3を回転自在に支持した自動機による位置出し方法において、アーム1の先端部に作業テーブル2又は作業テーブル2上の物体の表面の高低を検出するセンサ4を支持し、作業テーブル2又は作業テーブル2上の物体におけるターゲットポイントに球面状ゲージ5を載せ、センサ4で作業テーブル2又は作業テーブル2上の物体のターゲットエリアをX軸方向への移動とθ方向への旋回で走査し、センサ4から得た検出信号の変化を以って球面状ゲージ5の頂部を検出し、当該頂部の位置座標を保存する自動機による位置出し方法。
(もっと読む)
21 - 40 / 230
[ Back to top ]