
Fターム[3C007KX07]の内容
マニピュレータ、ロボット (46,145) | センサの配置 (1,426) | 腕に設けるもの (849) | ハンドに設けるもの (411)
Fターム[3C007KX07]の下位に属するFターム
指、吸着パッドに設けるもの (181)
Fターム[3C007KX07]に分類される特許
61 - 80 / 230
吸引保持方法、搬送装置、搬送方法、及び吸引保持装置
【課題】保持対象物が急激に引き寄せられることで、吹出す気体の圧力に抗して保持対象物が吸引保持面に接触することを抑制することができる吸引保持方法、搬送装置、搬送方法、及び吸引保持装置を提供する。
【解決手段】吸引保持方法は、旋回流発生室に発生させた気体の旋回流に生じる負圧と、旋回流発生室の吹出し口から吹出し口が開口した吸引保持面に流出する気体とにより、吸引保持面を有する吸引パットに、保持対象物を非接触で吸引保持する吸引保持方法であって、旋回流発生室に圧縮気体が供給されていない状態の吸引パットの吸引保持面を、保持対象物の被吸引保持面に対して、吸引パットが保持対象物を吸引保持している状態における吸引保持面と被吸引保持面との保持距離、又は保持距離より短い距離を隔てた吸引初期位置に位置させる工程と、吸引パットの旋回流発生室に圧縮気体を供給して、保持対象物を吸引して吸引保持状態にする工程と、を有する。
(もっと読む)
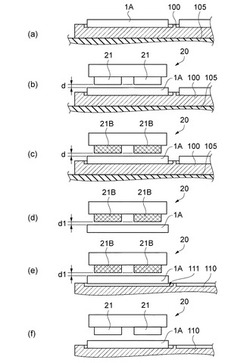
物品保持装置

【課題】物品を非接触で保持する物品保持装置において、物品の保持及び解除を迅速に行えるようにする。
【解決手段】物品保持装置20は、ガラス基板を非接触で保持する装置であり、装置本体21と、ファン制御部30と、を備えている。装置本体21は、ケース22と、ファン24と、吸い込み口26と、吹き出し口28と、を有している。ケース22は、ガラス基板に対向可能な物品対向部42及び内部に設けられた空間40aを有している。ファン24は、ケース22の空間40aに配置され、気体を吸い込んで吹き出す。吸い込み口26は、ファン24の吸い込み側と連通する。吹き出し口28は、吸い込み口26と異なる位置で物品対向部42に配置され、ファン24の吹き出し側と連通する。ファン制御部30は、ガラス基板を保持可能にファン24の回転速度を制御する。
(もっと読む)
吸引保持ハンド、吸引保持方法、及び搬送装置
【課題】保持端末の吸着端面に対する保持対象物の姿勢を一定に保ち、吸着端面に対する保持対象物の姿勢が一定でなくなって傾くことに起因して、吸着端面と保持対象物との間の隙間が保たれなくなり、吸着端面と保持対象物とが接触することなどを抑制できる吸引保持ハンド、吸引保持方法、及び搬送装置を提供する。
【解決手段】吸引保持ハンドは、旋回流発生室に発生させた気体の旋回流の中心部に生ずる負圧と、旋回流発生室の端から側方に流出する気体とにより、保持対象物を非接触で吸引保持する吸引保持ハンドであって、旋回流発生室の吸引用吹出し口が開口した吸引保持面を有する吸引パットと、吸引パットに吸引されて吸引保持面に臨む位置に在る保持対象物の面に略連続する被吸引面に対向し、被吸引面に圧縮気体を吹き付けることが可能な位置に配設された複数の吹出し孔を有する気体吹出し装置と、を備える。
(もっと読む)
ロボットの制御装置
【課題】
作業ツールが作業中にレーザセンサを利用する倣い有効区間と作業ツールが作業中にレーザセンサを利用しない倣い無効区間において、倣い有効区間では位置姿勢制御を行い、倣い無効区間では教示姿勢となるように姿勢制御の切替えができるロボットの制御装置を提供する。
【解決手段】
溶接ロボットの制御装置はワークの形状を認識するレーザセンサを備える。レーザセンサを利用する倣い有効区間では、センサの検出結果に基づく目標位置姿勢に基づいて位置姿勢倣い制御を行うロボット制御部RCを備える。ロボット制御部RCは、倣い有効区間に隣接する前記センサを利用しない倣い無効区間では、倣い無効区間の教示点における教示データに含まれる教示姿勢となるようにロボットの姿勢制御を行うとともに、倣い有効区間の終了点の実位置と、前記目標位置姿勢の位置との差に基づいて位置制御を行う第1位置姿勢制御を行う。
(もっと読む)
制御システム、制御方法、操作制御装置及び作業装置
【課題】被制御体とその周辺にある障害物とが接近していることを操作者に伝えて遠隔制御に係る操作性を向上させる。
【解決手段】ロボット10は、ロボットハンド先端部とその周辺にある障害物との距離Lと、ロボットハンド先端部の移動速度Vを特定し(S1,S2)、ロボットハンド先端部が障害物に接触するまでの推定接触時間を算出する(S3)。ロボット10は、ロボットハンド先端部が障害物に接近している旨を通知する接触情報を操作制御装置20宛てに送信した時から、通信路を経由して接触情報が操作制御装置20に到達するまでの伝送所要時間の予測値Tdを取得する(S4)。ロボット10は、推定所要時間が予測値Tdと規定時間Trとの和以下になると(S5;YES)、接触情報を送信する(S6,S7)。これにより通信遅延の程度に関わらず、操作制御装置20は、現に接触がある前に接触情報に基づき両者の接近を報知する(S8,S9)。
(もっと読む)
把持装置
【課題】溝形部材の把持後に溝形部材の姿勢調整を必要としない把持装置を提供することを課題とする。
【解決手段】把持装置40は、ロアサッシュ12の底壁71に当接する第1当接部43と、連結部材18の下面73に当接する第2当接部45と、第1電動モータ46で回転させられることでロアサッシュ12の側壁72の凸部15に係合する第1凹部49及び側壁75の凸部16に係合する第1凹部48が設けられている第1係合部51と、第2電動モータ52で回転させられることで凸部15、16に係合する2つの第2凹部が設けられている第2係合部56とを備えている。
【効果】把持装置40に対するロアサッシュ12の位置決め精度が向上するので、把持装置40に対するロアサッシュ12の姿勢調整が不要になる。したがって、ロアサッシュ12の把持後にロアサッシュ12の姿勢調整を必要としない把持装置40を提供することができる。
(もっと読む)
ロボット
【課題】ロボットにより行われるドア開閉方法に関し、特に開閉方向が未知であるドアを自動的に開閉できるようにする。
【解決手段】ロボットは、ロボットアーム1と、取っ手を把持するハンド形状あるいは引っ掛けられる形状の手先効果器2を備えており、ロボットがドア取っ手を把持している手先を様々な方向に動かし、力検出部3により力情報を検出するとともに手先位置計算部4により算出された手先の位置変位を検出する。力検出部3で検出された力が閾値以上ならば真のドア開閉方向ではなく、力検出部3で検出された力が閾値以下かつ手先位置計算部4により算出された動作の試行前後の手先の位置変位があれば、真のドア開閉方向であるものとする。
(もっと読む)
ワークピックアップ装置及び方法
【課題】把持手段をワークに適切に吸着させることができるワークピックアップ装置を提供すること。
【解決手段】ワークピックアップ装置1は、サーボシリンダ11を待機位置から下降させる下降手段21と、バキュームカップ13がブランク15を押圧する力に対応する物理量を検出する検出手段22と、検出した物理量と基準となる物理量とを比較する比較手段23と、比較結果に基づき、サーボシリンダ11を下降させるか停止させるかを制御する停止制御手段と、を含む。
(もっと読む)
搬送ロボット
【課題】高価な力センサや複雑な信号処理を不要にしつつ、吸着部材を適切な力で対象物に確実に押し付けた状態で対象物を吸着把持できる搬送ロボットを提供する。
【解決手段】
支持体5が取り付けられ、支持体を移動させるように動作する動作機構7と、吸着部材3を対象物に押し付けるために、吸着部材と支持体のうち吸着部材を移動方向前方側にして、吸着部材を対象物に向けて移動させる押付移動を動作機構に行わせる動作制御部11と、押付移動により吸着部材が対象物に押し付けられることで、吸着部材が弾性的に支持体側へ押し戻された量が所定量に達したかを検知する押付検知部9とを備える。押付検知部が、吸着部材の押し戻された量が所定量となったことを検知した時に、動作制御部は、押付移動を停止させる。
(もっと読む)
ロボットハンドの位置補正方法、ロボットハンド、ロボット
【課題】良好にティーチングを実施することが可能なロボットハンドの位置補正方法、ロボットハンド、ロボットを提供する。
【解決手段】複数の関節とCCDカメラ313を有するロボットハンド300とを備えるロボットに対してワーク200に設定された目標位置を教示する際にロボットハンド300の位置を補正する方法であって、目標位置に挿入したブッシュ210に設けられた目標マークをCCDカメラ313により撮像して、当該撮像した目標マークとCCDカメラ313の撮像範囲の基準位置とから、ロボットハンド300と目標位置との相対的な位置ズレを認識する認識ステップと、認識した位置ズレが小さくなるようにロボットの関節の駆動を制御してロボットハンド300の位置を補正する第1の位置補正ステップと、を備える。
(もっと読む)
ロボットハンドの歪み検出方法および自動交換システム
【課題】 ロボットハンドの歪みの有無を検出する安価なロボットハンドの歪み検出方法の提供と設定値以上の歪みを検出した時には予備のロボットハンドに自動交換するロボットハンドの自動交換システムの提供。
【解決手段】 材料をXY平面に平行に保持する材料保持手段を備えたロボットハンド13をロボット11に着脱交換自在に設け、定盤1表面にローカル座標(x,y,z)を設定し、前記ロボットハンドに4個の距離測定センサを設け、加工前に前記ローカル座標による歪み測定用プログラムによりロボットハンドを定盤上に位置決めし、前記4個の距離測定センサにより定盤表面との距離を測定し、この距離測定センサのそれぞれの測定値と、移動位置における定盤の表面との間の距離とを比較して平行度を求めてロボットハンドの歪みを求め、歪みが設定値以上の場合には予備のロボットハンドに自動交換することを特徴とするロボットハンドの自動交換システム。
(もっと読む)
ロボット制御装置及び方法
【課題】コストの増加等の問題を生ずることなく、把持動作の成功率を向上させる。
【解決手段】本発明に係るロボット制御装置は、ロボットの体幹部に搭載され作業領域の画像情報を取得する撮像装置2と、撮像装置2により取得された画像情報に基づいて物体の位置を認識する物体位置認識部3と、物体位置認識部3により認識された物体の位置に基づいてアーム部を動作させるアーム制御部4と、撮像装置3により取得された画像情報に基づいてハンド部、物体、及び撮像装置の相対的な位置関係を認識し、この位置関係に基づいてハンド部が適正位置にあるか否かを判定するハンド位置判定部5と、ハンド部が適正位置にあると判定された場合にハンド部に物体を把持する動作を実行させるハンド制御部6と、ハンド部が適正位置にないと判定された場合にアーム部にハンド部を適正位置に移動させる動作を実行させるアーム修正動作部7とを備える。
(もっと読む)
ロボットシステム及びその制御方法
【課題】操作性を向上させたロボットシステム及びその制御方法を提供すること。
【解決手段】ロボットシステム1は、所定空間内を移動可能なロボットアーム手段2と、所定空間内におけるロボットアーム手段2の現在位置を検出する現在位置検出手段と、所定空間内における、ロボットアーム手段2を移動させる目標位置を設定する目標位置設定手段53と、現在位置検出手段により検出された現在位置と、目標位置設定手段53により設定された目標位置と、の偏差δを算出する偏差算出手段52と、偏差算出手段52により算出された偏差δと、現在位置検出手段により検出された現在位置と、に基づいて、ロボットアーム手段2を目標位置へ移動させる制御を行う制御手段6と、を備えている。
(もっと読む)
移載機
【課題】フォークに光センサの配線をすることなくワークの有無を検知することができる移載機を提供すること。
【解決手段】屈伸可能に連結された第1アーム1及び第2アーム2を左右に1対配設し、第1アーム1の基部をそれぞれ駆動軸3に接続するとともに、第2アーム2の先端部でフォーク4を支持し、各アーム1、2の屈伸によりフォーク4を進退するようにした移載機において、フォーク4上のワークWの有無を検知する光センサ10を移載機本体7に設けるとともに、フォーク4上のワークWの有無によって開閉する遮光板12と、その作動機構13からなるシャッタ機構を有するミラー11を配設し、光センサ10の光をミラー11に反射させることによりワークWの有無を検知できるようにし、かつ、光センサ10をミラー11が通過する経路から外れた位置に取り付ける。
(もっと読む)
移送システム
【課題】本発明は、異形の混在した箱物の大きさを検出して、正確に移載するロボットシステムを提供する。
【解決手段】
カセットに積載された箱物3を移載する移送システムであって、前記箱物3を積載した前記カセットと、前記カセットに少なくとも2つのアーム7R、7Lを挿入し、前記箱物3を移載する双腕ロボット1との間に、コンベア2を介して対向するように配置されたものである。
(もっと読む)
基板搬送ロボット及びそれを備えた基板搬送装置、半導体製造装置
【課題】基板搬送用ロボットにおいて、基板を目的位置へ搬送する際の搬送経路上に障害物が存在する場合の干渉回避動作を早く行う。また、基板の有無に応じて最短の軌跡を通過できるようにする。
【解決手段】基板搬送ロボットの動作範囲に予め干渉領域を設定し、教示位置の動作の開始位置と目的位置と干渉領域との組み合わせのパターンを記憶し、開始位置から目的位置までの動作がパターンのいずれに当てはまるかを判定し、判定したパターンに応じて、干渉領域を避けるように開始位置から目的位置までの動作軌跡を決定するようにした。
(もっと読む)
ロボットハンド
【課題】 精度良く物体を選別し、物体を把持することを提供することにある。
【解決手段】 支持部40と、支持部40に設けられ、物体100を把持するための対向する第1及び第2の把持部110と、第1及び第2の把持部110にそれぞれ設けられ、物体100に光を照射するための対向する第1及び第2の光源90と、支持部40に設けられ、且つ、第1及び第2の把持部110を含む平面によって挟まれた領域に設けられ、且つ、光によって照射された物体100を撮像して物体100の画像を取得する撮像装置50と、撮像装置50に接続され、且つ、撮像装置50で取得した画像を処理する画像処理装置とを備えたことを特徴とするロボットハンド。
(もっと読む)
移送ロボットの制御方法
【課題】本発明は、比較的小さな設置面積に配置でき、上下への昇降範囲が広くできるとともに、安全にワークを移送することが可能な移送ロボットを提供する。
【解決手段】搬送物を載置するハンド部14と、前記ハンド部14を一方向に移動させる水平アーム機構30と、前記水平アーム機構30を上下に移動する昇降機構20を備えた移送ロボットにおいて、前記昇降機構20が、ベース部材2に備えられた少なくとも2組のリンク機構から構成され、2組のリンク機構の第2関節部6が互いに内側になるように動作させながら、ハンド部14のローリング方向、横ずれ動作、ヨーイング方向の動作を行なう。
(もっと読む)
画像を利用したセンサレスモータ駆動ロボット
【課題】ハンドの移動の開始からワークの把持、さらに移動、ワークの解放に至る一連のプロセスの中で、位置認識の必要度合いに応じて必要な手段を確保して、全体として多関節アームロボットの効率的な移動、動作の実現を図ることを目的とする。
【解決手段】アーム及び/又はハンドの駆動を外部センサによるフィードバック機構を有さないモータにより行い、かつ、少なくともワーク検索位置からワーク把持まで等の移動及び動作はステレオカメラで撮像したワーク等の画像と予めデータベースに保存されたワーク等のテンプレート画像とのマッチングによるワーク等検出に基づいて前記モータにより行うことを特徴とする。
(もっと読む)
腱駆動型マニピュレータのための関節空間インピーダンス制御
【課題】多節型ロボットハンドにおいて、関節同士に力学的連成を生じさせることなく関節トルク又は関節インピーダンスの閉ループ制御を行う腱駆動型マニピュレータのシステムと制御方法を提供する。
【解決手段】単一の線形演算を使用して、トルクエラーを腱の位置空間へ投影することによって、腱の基準位置又はモーターコマンドを計算する段階を備えている。センサで感知された腱張力と基準トルクと内部張力とを使用して、トルクエラーを計算する。関節位置エラーに基づいて基準トルクを計算することによって関節インピーダンスを制御するのに使用することができる。また、トルクエラーを腱張力空間に投影し、次にそれを関節空間に投影し直すことによって、最小及び最大腱張力を制限する。
(もっと読む)
61 - 80 / 230
[ Back to top ]