
Fターム[3C007LT06]の内容
マニピュレータ、ロボット (46,145) | 位置制御 (995) | 外界計測センサを用いた位置制御 (283)
Fターム[3C007LT06]に分類される特許
1 - 20 / 283
ピッキング用部品供給装置、および部品ピッキング装置
【課題】
部品供給装置に多数の部品を山積み状態でストックしても、容易かつ確実に部品の山積み状態を変えることが可能な山積み部品供給装置を提供する。
【解決手段】
前記収容容器の底面を構成する容器底部と、収容容器の壁面を形成する円筒形状であって、当該円筒形状の軸を回転軸として前記容器底部に対して相対回転可能な収容容器本体と、前記前記収容容器本体に所定の回転動作をさせる容器本体駆動部と、を備えた。
(もっと読む)
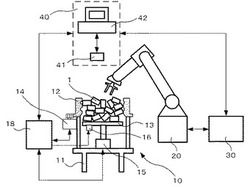
立体視ロボットピッキング装置

【課題】カメラとワークの間隔が長くなるのを抑制し、ステレオ方式でワークの3次元位置を算出しロボットの吸引部の配置位置を決める立体視ロボットピッキング装置を提供する。
【解決手段】コンテナ11内のワーク12を順次ロボット13によって別位置に移動する立体視ロボットピッキング装置10において、ワーク取出し位置18までコンテナ11を送る移動手段14と、ワーク取出し位置18にあるコンテナ11全体を撮像するカメラ15と、ワーク取出し位置18にあるコンテナ11を部分的に撮像するカメラ16と、カメラ15、16が撮像した各画像中のワーク12をパターンマッチングによって検出して、各画像中でのワーク12の2次元位置を算出する画像処理手段23とを有し、カメラ15、16は、コンテナ11の移動方向に沿って配置され、画像処理手段23は、カメラ15、16の各画像中のワーク12の2次元位置からワーク12の3次元位置を算出する。
(もっと読む)
画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置
【課題】汎用的なロボットが配置されている生産ラインであっても、コンベアトラッキング等の処理を容易に実現できる画像処理装置および画像処理システム、ならびにそれらに向けられたガイダンス装置を提供する。
【解決手段】画像処理装置は、搬送装置上のワークの位置情報を管理する管理手段と、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する取得手段と、管理手段によって管理されているワークの位置情報を撮像部の撮像が行われたタイミングに対応する値に更新する更新手段と、更新手段による更新後の位置情報と計測処理によって取得されたワークの位置情報とを比較することで、撮像部の撮像範囲内に新たに搬送されたワークを特定する特定手段と、特定手段が特定したワークの位置情報を制御装置へ送信する送信手段とを含む。
(もっと読む)
ロボット制御装置、物品取り出しシステム、プログラムおよびロボットの制御方法
【課題】 物品の姿勢がランダムであっても、ロボットを用いて取り出し部位を把持して、物品を取り出す。
【解決手段】 複数の取り出し部位を備える物品の位置・姿勢情報に基づいて、前記複数の取り出し部位にそれぞれ設定された把持方向のうち、所定の方向となす角度が最小となる把持方向を選択方向として選択する方向選択部と、前記複数の取り出し部位のうち、前記把持方向として前記選択方向が設定された取り出し部位を把持して前記物品を取り出すようにロボットを制御する制御部と、を有する。
(もっと読む)
電磁石ハンドおよびそれを用いたロボットシステム
【課題】箱体内にバラ積み状態で収容されたワークを、中断することなく、干渉なく、一つずつピッキングする。
【解決手段】箱体C内にバラ積み状態で収容された複数の円柱または円筒形状ワークWをピッキングするロボット12を有するロボットシステム10であって、ロボット12は、第1の電磁吸着面20aでワークWの円周面Wpまたは端面Weを電磁吸着する主電磁吸着部20と、先端24に且つ互いに鈍角に配置された第2及び第3の電磁吸着面22a,22bの両方でワークWの円周面Wpを電磁吸着するまたは第2または第3の電磁吸着面22a,22bのいずれか一方でワークWの端面Weを電磁吸着する副電磁吸着部22とを有する電磁石ハンド18を有する。ロボット12は、バラ積み状態の複数のワークWそれぞれを、異なる複数の電磁吸着形態でピッキングする。
(もっと読む)
ピッキング用ワーク供給装置、およびワークピッキング装置
【課題】
バラ積みされたワークの位置と姿勢を確実に変化させ、新たなバラ積み状態を生成するピッキング用ワーク供給装置、および当該ピッキング用ワーク供給装置を用いたワークピッキング装置を提供する。
【解決手段】
ワーク供給装置に、複数のワークをバラ積み可能な上方が開いた容器本体と、前記容器本体の底部から上方内側に進退自在に設けられた突出部と、前記突出部を進退自在に動作させる突出駆動部と、を備えている。
(もっと読む)
ワークピッキングシステム
【課題】把持対象となるワークの姿勢に関わらず、ワークの把持姿勢を一定に保つこと。
【解決手段】把持対象であるワークの3次元形状を計測する3次元計測部10と、多軸ロボット30の終端可動部に設けられ、把持爪の間隔を変更する機構および把持爪の先端向きを変更する機構を含むハンド20とを備えるようにワークピッキングシステム1を構成する。また、3次元計測部によって計測された3次元形状に基づいてワークの姿勢を算出する算出部41bと、算出部によって算出されたワークの姿勢および終端可動部の回転軸の方向に基づいて把持爪の先端向きを決定する決定部41cと、終端可動部の回転軸の向きおよび決定部によって決定された把持爪の先端向きを保持しつつワークを把持する動作を指示する指示部41dとを備えるようにワークピッキングシステムを構成する。
(もっと読む)
画像処理装置および画像処理システム
【課題】撮像装置に対する撮像指示を発生してから実際に撮像が行われるまでにタイムラグが存在する場合であっても、正確にトラッキング処理を行うことのできる視覚センサを提供する。
【解決手段】画像処理装置は、搬送装置の搬送経路における移動量を示す信号を受付けるインターフェイスと、搬送経路において撮像部の撮像範囲より下流側に配置されるとともにワークを取り扱う移動機械、を制御するための制御装置と通信するためのインターフェイスと、撮像部の撮像によって得られた画像に対して計測処理を行うことで、画像中の予め登録されたワークに対応する領域の位置情報を取得する手段と、制御装置との間で搬送経路における移動量を同期して保持する手段と、撮像指示に応答して撮像部による撮像を開始する手段と、位置情報と当該位置情報の取得に用いた画像を撮像したときの移動量とを制御装置へ送信する手段とを含む。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法
【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
ハニカム構造体の搬送装置、及び、ハニカム構造体の封口方法
【課題】ハニカム構造体の貫通孔と封口用マスクの貫通孔との正確な位置合わせを容易に行なうことのできるハニカム構造体の搬送装置及びハニカム構造体の封口方法を提供する。
【解決手段】初期回転角度認識部が、カメラ90の画像に基づいてハニカム構造体70の初期回転角度を認識し、必要回転角度取得部が、アーム水平旋回部62の駆動に伴うハニカム構造体70の回転角度に基づいて、封口用マスク170に対するハニカム構造体70の回転角度を所望の最終回転角度とするために必要な回転角度を取得し、ハンド軸回転制御部が、必要な回転角度に基づいてハンド軸回転部20を駆動してハンド10が把持したハニカム構造体70を回転させる。ハニカム構造体70を封口用マスク170の上に所望の回転角度として配置できるので、封口用マスク170とハニカム構造体70との位置合わせが容易となる。
(もっと読む)
立体的表示方法
【課題】3次元データについて、特殊な表示装置等を用いることなく、ワークの傾きや重なりを認識することが可能な立体的表示方法を提供する。
【解決手段】ワーク1の3次元データと、3次元データについて所定の視点から視認した場合における2次元データを作成する視覚化装置20と、2次元データの表示が可能である表示装置21と、を準備し、観察者が3次元データを視認する視点と、3次元データを回転させる際の最大回転角である最大角度及び最小回転角である最小角度と、3次元データを回転させる際に中心軸となる回転中心軸とを決定し、回転中心軸を基準として前記3次元データを最小角度と最大角度の間で回転させた場合の複数の回転角度において、視点から3次元データを視認した場合における2次元データを、視覚化装置20によって複数作成し、表示装置21に複数の2次元データを表示する。
(もっと読む)
探索装置、自動組付け装置、探索方法、およびプログラム
【課題】部品のワークへの組付け位置を精度よく探索できる探索装置を提供する。
【解決手段】ワークは、バカ穴とバカ穴の底面に形成されたネジ穴とを有する。探索装置は、ネジと底面とを接触させた状態で、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを移動させる。探索装置は、u軸方向の正および負の向きと、v軸方向の正および負の向きとに、ネジを各々移動させたときに反力が閾値Th1以上となる位置Pα,Pβ,Pγ,Pδを特定する。探索装置は、位置Pαと位置Pβとの間の距離が閾値Th2未満の場合には、位置Pαと位置Pβとの中間位置を起点としたv軸方向への移動と、位置Pγおよび位置Pδの特定とを実行する。探索装置は、位置Pγと位置Pδとの間の距離が閾値Th2未満の場合には、位置Pγと位置Pδとの中間位置をネジの組付け位置と判断する。
(もっと読む)
清掃ロボットシステム及びその制御方法
【課題】
アレンジロボットが、清掃ロボット及びパネル部材の位置等の環境情報を確実に取得し、自律運転することができる清掃ロボットシステム及びその制御方法を提供する。
【解決手段】
ハンド部10に少なくとも清掃ロボット3とパネル部材5の位置及び形状を計測するセンサ12、13を設置した清掃ロボットシステム1の制御方法であって、アレンジロボット2が移動する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、アレンジロボット2の移動を自動制御するステップと、アレンジロボット2が清掃ロボット3を把持する際に、マニピュレータ4を作動させ、複数の位置でセンサ12、13が計測を行うステップと、センサ12、13が取得した情報を元に、マニピュレータ4が清掃ロボット3を把持する作業を自動制御するステップを有する。
(もっと読む)
自動ピッキング装置及び自動ピッキング方法
【課題】自動ピッキングを行う際に、ハンド及びピッキング対象部品の破損リスクを低くする自動ピッキング装置を提供する。
【解決手段】部品60の高さ情報を含む視覚情報を取得する計測装置20と、部品20どうしの高さの差が許容値以上になったか判断し、高さの差dが許容値以上である場合には、最上部品60aを移動させる最上部品移動命令を生成する許容差制御装置21と、部品60の位置情報及び姿勢情報を演算する部品位置姿勢情報演算装置22と、最上部品60a又は部品60に対するロボット10を制御するロボット制御信号を生成し、ロボット制御信号によりロボット10を制御するロボット制御装置30と、ロボット10の先端に取り付けられたエンドエフェクタ16を制御するエンドエフェクタ制御信号を生成し、エンドエフェクタ制御信号によりエンドエフェクタ16を制御するエンドエフェクタ制御装置40とを備える。
(もっと読む)
物体把持装置、物体把持装置の制御方法、およびプログラム
【課題】ピッキング時の干渉によるワークの位置姿勢の変動の影響を低減することを目的とする。
【解決手段】複数のワークを含む領域の画像を撮像する撮像部と、複数のワークを含む領域の距離情報を取得する取得部と、画像と距離情報とに基づいて、複数のワークから複数の把持候補ワークの三次元位置姿勢を計測して三次元位置姿勢情報を生成する計測部と、計測部により計測された前記三次元位置姿勢情報に基づいて、把持候補ワークから把持対象ワークを選択する選択部と、把持対象ワークを把持する把持部と、把持部により把持対象ワークが把持されている間に、把持候補ワークの三次元位置姿勢を所定の時間間隔で計測して三次元位置姿勢情報を更新する更新部と、を備え、選択部は、把持部による把持が終了した場合、更新部により更新された把持候補ワークの前記三次元位置姿勢情報に基づいて、次の把持対象ワークを選択する。
(もっと読む)
ワーク取り出し方法
【課題】ワークの状態に関係なく密集した複数のワークの中から任意のワークを簡単に取り出すことができるワーク取り出し方法を提供する。
【解決手段】本発明に係るワーク取り出し方法によれば、検出されたワークWの位置及び姿勢に基づき任意のワークWが第1方向D1に押し動かされる。こうしてワークW上に第1チャック15aで把持可能な第1把持領域A1が確保される。その結果、第1チャック15aはワークWの第1把持領域A1を確実に把持することができる。その後、ワークWの一端が持ち上げられて、第2チャック15bが把持可能な第2把持領域A2が確保される。その結果、第2チャック15bはワークWの第2把持領域A2を確実に把持することができる。こうしてワーク取り出し装置1は、ワークWの状態に関係なく密集した複数のワークWの中から任意のワークWを簡単に取り出すことができる。
(もっと読む)
サスペンションアッセンブリ取り付け方法
【課題】サスペンションアッセンブリを車両ボディに接近させていく過程でダンパーが車両ボディ側と干渉する場合でも、外部センシング機器を用いずに、その干渉を回避してサスペンションアッセンブリを車両に取り付けることのできるサスペンションアッセンブリ取り付け方法を提供すること。
【解決手段】サス整列・搭載ロボット4の上昇と同期させて、下廻り締付・ダンパー挿入ロボット5によりダンパーの位置を必要に応じて変更することで、ボディに対するダンパーの干渉を回避する。所定の高さに到達したとき、ダンパー取付孔13L,13Rの位置に関連して動作するエンジンルーム内締付ロボット6のエンドエフェクタ61の位置を測定し、測定した位置からダンパー取付孔の位置を算出し、算出した位置を下廻り締付・ダンパー挿入ロボットに伝送し、伝送された位置に応じてダンパーをダンパー取付孔に位置合わせする。
(もっと読む)
ロボットシステム
【課題】自走式のロボットを適用して、被検者である人間に対して所定の処置を確実にかつ低コストで行うことができるロボットシステムを提供する。
【解決手段】移動可能なロボット100と、シート状に形成され、上面における被検者200の位置および姿勢を検出するシートセンサ10と、シートセンサ10に設けられ、シートセンサ10により検出された被検者200の位置および姿勢に関する情報、ならびに、シートセンサ10の位置および向きに関する情報を送信する第一,第二送信部23,32と、ロボット100に設けられ、第一,第二送信部23,32により送信される情報を受信する受信部111と、ロボット100に設けられ、受信部111により受信した情報に基づいて、ロボット100が被検者200に対する所定の処置を行うようにロボット100を制御するロボット制御部112を備える。
(もっと読む)
画像生成装置、画像生成方法、およびプログラム
【課題】把持機構等の不要部分のない対象物のみの姿勢別画像を簡便な画像処理で得る。
【解決手段】対象物の画像を生成する画像生成装置であって、対象物を把持する把持部と、対象物と把持部との少なくとも1つの画像を撮像する撮像部と、把持部により把持された対象物が、撮像部に対して複数の所定姿勢のうちの1つの所定姿勢となるように把持部を制御する制御部と、撮像部により撮像された1つの所定姿勢にある対象物および対象物が1つの所定姿勢となるように制御された把持部の画像と、1つの所定姿勢とを関連付けて、把持状態画像として取得する第1の画像取得部と、対象物を把持しておらず且つ対象物が1つの所定姿勢となるように制御された姿勢と一致する所定姿勢である把持部の画像を非把持状態画像として取得する第2の画像取得部と、把持状態画像と、非把持状態画像との差分に基づいて、1つの所定姿勢について対象物のみの対象物画像を生成する画像生成部と、を備える。
(もっと読む)
形状計測装置、ロボットシステムおよび形状計測方法
【課題】計測対象物の走査に要する合計の時間を短くすることが可能な形状計測装置を提供する。
【解決手段】このセンサユニット(形状計測装置)4は、レーザ光を照射するレーザ発生器15と、レーザ発生器15から照射されたレーザスリット光をワーク200の載置されている領域に走査するミラー部16と、ミラー部16から照射され、計測対象物により反射されたレーザ光の反射光を検出することにより、ワーク200の載置されている領域を検出するとともに、ワーク200の3次元計測を行う高速カメラ11と、高速カメラ11によって検出されたワーク200の載置されている領域に応じてミラー部16による走査範囲を変更するように制御するセンサコントローラ13とを備える。
(もっと読む)
1 - 20 / 283
[ Back to top ]