
Fターム[3C007WA24]の内容
マニピュレータ、ロボット (46,145) | 自走、自律型のタイプ (2,408) | 特殊環境の移動 (241) | 不整地の移動 (72)
Fターム[3C007WA24]に分類される特許
1 - 20 / 72
脚式ロボット、その制御方法、及び制御プログラム
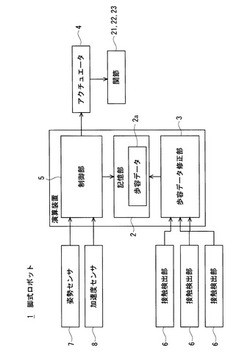
【課題】不整地路面に足部を確実に着地させること。
【解決手段】脚式ロボット1は、胴体10と、胴体10に連結された脚部20と、脚部20の下端に設けられた足部26と、歩容データ2aを記憶する記憶手段と、記憶手段に記憶された歩容データ2aに基づいて、脚部20の関節を駆動制御する制御手段と、足部26の足裏と路面との接触を検出する接触検出手段と、接触検出手段により検出された足部26の足裏と路面との接触位置を中心にして、足部26をロール軸及び/又はピッチ軸周りに回転させ、足部26の足裏の他の部分を路面に接地させるように歩容データ2aを修正する歩容データ修正手段と、を備える。
(もっと読む)
多形態ロボット

【課題】平地では姿勢を変えることなくすべての方向に移動でき、転倒しても移動可能な姿勢に復帰でき、凹凸の激しい路面で常に重心を安定させて移動でき、また狭い場所への進入、パイプ等の内部移動、円柱を挟み込むことで昇降動作を行なうことができる多形態ロボットを提供する。
【解決手段】上下・前後・左右対称な形状とするボディとボディ2を支持する移動機構と移動機構に使用する全方向移動部材と、駆動輪を脚の先に結合しそして駆動輪の結合部に関節を1つ設ける脚部9と、脚先の関節6以外また可移動範囲を歩行動作時に必要な関節角度の2倍とする3つの関節3、4、5と、四足の脚部、を備える。
(もっと読む)
連結移動装置
【課題】移動体が目標地点へ移動している途中で、バッテリー残量が低下しても、当該移動体が継続して移動できるようにする。
【解決手段】連結移動装置10は、不整地上を移動する複数の移動体3と、これらの移動体3を連結し電力を伝達可能な線状体5とを備える。複数の移動体3が、線状体5で連結された状態で移動する。各移動体3は、不整地上を移動するための移動手段と、給電されることにより該移動手段を駆動する駆動装置と、移動用エネルギーを蓄積し該エネルギーを用いて駆動装置に給電する給電装置と、を有する。各移動体3の給電装置は、他の移動体の給電装置から線状体5を介して電力を受けられるようになっている。
(もっと読む)
ロボット本体のキャスティング方法及び装置
【課題】 到達が困難な位置に、ロボット本体を正確に移動させることができ、災害救助や宇宙空間の作業等に広く応用することを可能にする。
【解決手段】 ロボット本体の初期位置と、ロボット本体の目標到達位置の3次元座標とに基づいて、少なくとも3カ所の目標固定位置を決定し、ワイヤの先端に設けられたグリッパあるいはアンカーをそれぞれの目標固定位置に固定し、ロボット本体と目標固定位置との間をそれぞれワイヤで連結する。次にロボット本体の目標キャスティング軌道を演算し、ワイヤのうち、少なくとも2本のワイヤの張力をそれぞれの目標値に制御し、各ワイヤにより張力拮抗状態を形成する。その後張力拮抗状態にあるワイヤのいずれかの固定を解除し、蓄積された弾性エネルギにより、ロボット本体を3次元空間にキャスティングするとともに、ロボット本体の3次元空間での運動を、各ワイヤの繰り出し量、巻き取り量、あるいは張力を別個に制御する。
(もっと読む)
二脚型移動装置
【課題】人間が暮らす住環境に存在する障害物をスムースに跨ぎ越すことのできる二脚型移動装置を提供する。
【解決手段】角度自在に屈折可能な膝関節を有する第1および第2の脚と、第1および第2の脚の根元の関節(腿関節)をそれぞれ回動自在に支持する臀部10と、前記膝関節の屈折角度および前記腿関節の回転角度をそれぞれ制御して、進行方向の床上に設けられた凸状の障害物を跨ぎ越す跨ぎ越し制御手段と、を備える。跨ぎ越し制御手段は、第2の脚を障害物の後方側に接地させた状態で第1の脚を前記障害物の上方へ振り出して該障害物を跨ぐ場合に、第2の脚の膝関節を後方へ突出させた姿勢(逆膝の姿勢)に制御する。好ましくは、第1および第2の脚の先端に設けられた第1および第2の車輪機構による走行を併用することにより、等速で走行しながらのスムースな跨ぎ越しを行う。
(もっと読む)
走行装置およびロボット
【課題】 砂地や泥濘地等の軟弱地面での走行性を高めた走行装置およびロボットを提供する。
【解決手段】
ロボットは、ボデイ1と、このボデイ1の左右に設けられた走行装置2を備えている。各走行装置2は、前後の車輪10と、これら車輪10に引っ張り状態で着脱可能に掛けられた弾性材料からなる無端状のカバーベルト20を有する。車輪10は、剛性の車輪本体11と、その外周に装着された弾性材料からなるタイヤ12を有する。タイヤ12の外周には多数の接地ラグ16が形成されている。カバーベルト20は、主部25と、主部25の両側縁部から内周側に突出する一対の係止部26とを有している。カバーベルト20の主部25が接地ラグ16の先端縁に接し、係止部26が接地ラグ16の側面に当たっている。
(もっと読む)
走行ロボット
【課題】従来の走行ロボットは、各駆動輪や各関節部にモータや回転駆動手段を備えていたので、重量が増すと共に、制御も複雑になり易く、小型軽量化や走行性及び信頼性のさらなる向上が要望されていた。
【解決手段】車体Bの前部に、ロール軸回りに回動自在なサスペンションアーム1と、サスペンションアーム1の両端部に対してピッチ軸回りに回転駆動可能な左右の前部支持脚2を備えると共に、各前部支持脚に少なくとも一つの駆動輪Wfを夫々備え、車体Bの後部に、ピッチ軸回りに回転駆動可能な左右の後部支持脚3と、各後部支持脚3に対してピッチ軸回りに回動自在な旋回脚4を備えると共に、各旋回脚4の両端部に駆動輪Wrを夫々備えた走行ロボットRとした。モータ類を削減して小型軽量化や制御の簡素化を実現すると共に、常に全ての駆動輪を接地させることを可能にして、走行性能のさらなる向上を実現し、月や惑星での探査活動に非常に好適なものとなる。
(もっと読む)
ロボット装置、その制御方法、及びプログラム
【課題】省電力化を実現したロボット装置、その制御方法、及びプログラムを提供すること。
【解決手段】ロボット装置10は、車輪を用いて走行する。また、ロボット装置10は、走行路面の状態を検出する状態検出手段と、車輪を回転可能に支持し、車輪からの衝撃を吸収するサスペンション手段と、サスペンション手段に対して駆動力を供給する駆動手段と、サスペンション手段の動作をロック及び解除するロック手段と、状態検出手段により検出された走行路面の状態に応じて、ロック手段のロック及び解除と、駆動手段の駆動及び停止と、を制御する制御手段と、を備えている。
(もっと読む)
脚式移動ロボットの制御装置
【課題】ロボットの移動経路周辺に存在する所定種類の段差部を適切に回避し得る目標運動を生成しつつ、ロボットの動作制御を行う。
【解決手段】目標運動決定手段100は、ロボット1の移動環境の床形状情報とロボット1の移動経路に関する要求とに基づき、ロボット1の脚体2の先端部の運動の軌道を規定する脚体運動パラメータを決定しつつ、ロボット1の目標運動を逐次決定する。目標運動決定手段100に床形状情報を出力する床形状情報出力手段114は、所定種類の段差部DFの起立面を実際の起立面よりも緩斜面に整形してなる床形状情報を出力する。
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
ロボット
【課題】胴体の下部に左右2本の脚部を備え、その脚部の先端に備えた車輪を適切に制御して凹凸路面を安定的に車輪で走行することが可能なロボットの脚部サスペンションを提供することにある。
【解決手段】2足型の倒立2輪走行にて移動するロボットにおいて、凹凸路面を安定して走行するため、各脚先と車輪の間にバネとダンパを備え、バネを懸架する位置をアクチュエータにより可変とすることで各脚先位置を調整可能であり、バネとダンパにより路面の凹凸を吸収し、上半身に搭載されたジャイロでロボットの状態を推定し、アクチュエータを伸縮させて上半身の揺れを収束することを特徴とする脚部サスペンション。
(もっと読む)
脚式ロボット
【課題】起伏や段差のある路面を安定に歩行することのできる脚式ロボットを提供する。
【解決手段】脚式ロボットは、記憶装置、4個以上の距離センサ群、路面センサ、及び、コントローラを備える。記憶装置は、足リンクの目標軌道を記憶している。距離センサ群は、足裏の4箇所以上の異なる位置に配置されている。各距離センサは、夫々の配置位置における足裏と路面との間の距離を計測する。路面センサは、路面の起伏や段差の形状を計測する。コントローラは次の処理を実行する。まずコントローラは、足リンクの目標軌道と路面センサの計測値によって定まる遊脚の足裏の接地予定領域を求める。次にコントローラは、求めた接地予定領域内に配置されている距離センサ群の中から3個の距離センサを選択する。そしてコントローラは、選択された3個の距離センサの計測値が等しくなるように足リンクの姿勢を制御する。
(もっと読む)
脚式ロボットとその制御方法
【課題】路面起伏にリアルタイムに適応して円滑に歩行することのできる脚式ロボットを提供する。
【解決手段】脚式ロボットは、記憶装置、離地位置と着地位置の間の路面起伏を計測する路面センサ、及び、脚の動作を制御するコントローラを備える。記憶装置は、歩行動作における足リンクの離地から着地までの遊脚軌道候補群を記憶している。複数の遊脚軌道候補は、相互にその軌道高さが異なっている。コントローラは、以下の計測ステップ、設定ステップ、選択ステップ、及び、制御ステップを実行する。計測ステップは、離地位置と着地位置の間の路面起伏を計測する。設定ステップは、計測された起伏表面に参照点を設定する。選択ステップは、参照点を通り脚式ロボットの進行方向と交差する鉛直面において参照点よりも高い位置でその鉛直面と交差する遊脚軌道候補を選択する。制御ステップは、選択された遊脚軌道候補に足リンクが追従するように脚を制御する。
(もっと読む)
多脚歩行式移動装置のハイブリッド制御装置及び手法
【課題】不整地のような未知の環境においても、任意の脚部制御とオートバランス制御とのそれぞれを同時に実行可能とする。
【解決手段】複数の脚で歩行する多脚歩行式移動装置において、任意の脚部制御と、バランス維持を自動で行なうためのオートバランス制御とを同時に実行するハイブリッド制御装置を備え、ハイブリッド制御装置は、足部の接地状態に応じて脚部制御とオートバランス制御との非干渉化を静力学的に行なう。
(もっと読む)
走行式作業ロボット
【課題】災害発生時における作業を高い信頼性をもって実行すること。
【解決手段】この走行式作業ロボットは、不整地に対して追従可能なクローラ1を備え、このクローラ1によって不整地上を走行することが可能な走行台車2と、この走行台車2上に配置された多軸構成の胴体部3と、この胴体部に備えられた多関節アーム4と、胴体部3に備えられた多関節撮影手段5とを備えている。また、走行式作業ロボットは、走行台車2の下部に複数のクローラ1をそれぞれ、各クローラ1の長さ方向中央部を支点として回転揺動可能な状態で備え、備えられた各クローラ1をそれぞれ独立に駆動させるクローラ駆動手段(クローラモータ)を付加した。
(もっと読む)
走行式作業ロボット
【課題】災害発生時における作業を高い信頼性をもって実行すること。
【解決手段】この走行式作業ロボットは、不整地に対して追従可能なクローラ1を備え、このクローラ1によって不整地上を走行することが可能な走行台車2と、この走行台車2上に配置された多軸構成の胴体部3と、この胴体部に備えられた多関節アーム4と、胴体部3に備えられた多関節撮影手段5とを備えている。また、胴体部3は、所定の揺動軸に沿って揺動可能であり、かつ所定の旋回軸を中心として旋回可能となっている。
(もっと読む)
走行式作業ロボット
【課題】災害発生時における作業を高い信頼性をもって実行すること。
【解決手段】この走行式作業ロボットは、不整地に対して追従可能なクローラ1を備え、このクローラ1によって不整地上を走行することが可能な走行台車2と、この走行台車2上に配置された多軸構成の胴体部3と、この胴体部に備えられた多関節アーム4と、胴体部3に備えられた多関節撮影手段5とを備えている。また、走行式作業ロボットでは、多関節アーム4が、7つの関節(S1〜S7)から構成されている。
(もっと読む)
車輪型ロボット
【課題】旋回走行時に無駄のない動きを行わせることができ、且つ障害物を乗り越えるとき、4輪を接地させて安定させる構造を取りながら、障害物の乗り越え時の直進性を向上させることを可能とする。
【解決手段】前輪車台部29及び後輪車台部31からなる車台フレーム1と、回転軸心が走行前後方向のベアリング・ケース33、軸受金具35,37、ベアリング・ケース41,51に回転自在に支持され車台フレーム1に前後に渡って延設され前後部に連動ベベル・ギヤ3,5を備えた操向連動軸7と、回転軸心が上下方向のベアリング・ケース39,45に回転自在に支持され下部に前後横フレーム49,51を各別に固定支持し前記前後部の連動ベベル・ギヤ3,5に各別に噛み合う操向ベベル・ギヤ9,11を各別に固定した前後輪操向軸13,15と、前輪17,19を回転駆動する駆動部25,27とを備えたことを特徴とする。
(もっと読む)
キャスタ装置および車輪型ロボット
【課題】 小型化および軽量化を図るのに好適なキャスタ装置を提供する。
【解決手段】 キャスタ装置30は、キャスタ31と、直動軸32aを有するリニアアクチュエータ32と、キャスタ31が受けた床反力を検出する床反力検出部33とを備える。キャスタ31は、従動輪31aと、従動輪31aを回転可能に支持し収容する車輪支持枠31bと、車輪支持枠31bの上部に取り付けられたキャスタ支持軸31cとを有する。そして、キャスタ支持軸31cおよび直動軸32aは、床反力検出部33を介して軸方向に連結されている。
(もっと読む)
不整地移動体用の半自律走行法
【課題】 従来、不整地環境を移動する移動体の移動方式において、主推進力発生部により走行するのみならず、可動腕3を用いて走行することで、走破性を向上させる方式が採られている。しかしながら、走破性が向上する反面、遠隔操作が困難になるという問題があった。
【解決手段】 本発明における不整地移動体は、主推進力発生部、可動腕部、測距装置を有する。測距装置を用いることで、地形に応じて可動腕を動かし、なお且つ転倒安定性を考慮に入れながら、移動体が半自律的に移動することにより、操縦者は移動体の移動方向を指示するのみで、移動体がその方向の不整地に応じた不整地移動機構の安全な動作を自律的に生成することが可能になる。
(もっと読む)
1 - 20 / 72
[ Back to top ]