
Fターム[3C007XG01]の内容
マニピュレータ、ロボット (46,145) | マイクロマニピュレータの構成、目的 (116) | 駆動源 (26)
Fターム[3C007XG01]に分類される特許
1 - 20 / 26
マイクロピンセット、その製造方法及びその操作方法
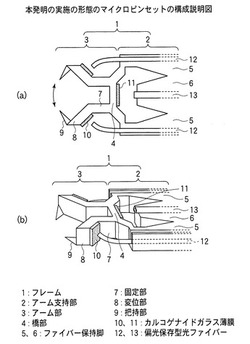
【課題】マイクロピンセット、その製造方法及びその操作方法に関し、操作性及び簡易性を向上する。
【解決手段】アーム支持部2と前記アーム支持部に設けられ先端部を把持部9とする一対のアーム部3とからなるフレーム1と、前記一対のアームに設けられたAs−S、As−Se或いはAs−S−Seのいずれかのカルコゲナイドガラス薄膜10,11からなる駆動素子と、前記カルコゲナイドガラス薄膜に偏光保持型光ファイバ12,13を経由してレーザ光を照射するレーザ光照射手段とを備える。
(もっと読む)
アクチュエータ装置

【課題】駆動力が用途に応じて適正な張力で制御できる形状記憶合金アクチュエータを提供する。
【解決手段】拮抗する一対の形状記憶合金ワイヤ106a、bと、形状記憶合金ワイヤ106a、bの少なくとも一方の張力を計測する張力測定部と、張力測定部で測定された結果に基づいて、各々の形状記憶合金ワイヤ106a、bに供給する熱量を独立に制御する制御部と、各々の形状記憶合金ワイヤ106a、bに供給される熱量の制御によって変位する可動部位に連結された可動端と、各々の形状記憶合金ワイヤ106a、bが所定の固定部位に固定された固定端と、を有し、制御部により、可動部位を所定の変位に移行もしくは所定の変位を維持するために各々の形状記憶合金ワイヤ106a、bに与えられる熱量は、張力測定部により計測された張力を所定範囲内に維持した状態で制御されることを特徴とする。
(もっと読む)
アクチュエータおよびマニピュレータ
【課題】煩雑な作業を行うことなく、ピペットを正確に直線運動させること。
【解決手段】ピペット素子34を駆動対象とするねじ軸52と、ねじ軸52とボールねじナット60を介して連結された回転軸54を回転駆動する中空モータ70と、圧電素子92への印加電圧に応じて回転軸54をその軸方向に沿って微動駆動させる微動機構44を備え、中空モータ70の駆動に伴う回転軸54の回転運動をボールねじナット60を介して直線運動に変換してねじ軸52に伝達する。中空モータ70の粗動駆動に伴うねじ軸52の直線運動によってピペット34をその軸方向に沿って粗動駆動し、微動機構44の微動駆動に伴うねじ軸52の直線運動によってピペット34をその軸方向に沿って微動駆動させる。
(もっと読む)
マニピュレータシステム及び微小操作対象物の操作方法
【課題】微小な操作対象物の交換作業を自動的に可能なマニピュレータシステム及び微小操作対象物の操作方法を提供する。
【解決手段】キャピラリ25,35を駆動対象として、外周側にねじ部を有するねじ軸と、回転軸を回転駆動するモータと、回転軸に固定されて、ねじ軸をその軸方向への移動を自在に支持するねじ要素と、圧電素子への印加電圧に応じて回転軸を微動駆動させる微動機構と、微動機構を伴って三次元空間を移動してキャピラリの位置を制御する三次元軸移動テーブルと、を有する一対のマニピュレータ14,16と、マニピュレータに操作される微小な操作対象物を観察する顕微鏡手段12と、マニピュレータの駆動を制御する制御手段43と、マニュピレータを駆動する操作手段47と、を備え、操作対象物を操作する際に、マニピュレータをシーケンス駆動することで、操作後の操作対象物と操作前の操作対象物との交換を自動化した。
(もっと読む)
マニピュレータ、マニピュレータの駆動方法、マニピュレータシステム及び微小操作対象物の操作方法
【課題】容易な位置決めとインジェクションとを同時に満たすことができるマニピュレータを提供する。
【解決手段】このマニピュレータ1は、操作試料に対してインジェクションを行なうものであって、XYZ軸方向に駆動可能であり、少なくともインジェクションを行なう軸方向の圧電素子6を駆動源とするナノポジショナ7と、圧電素子に対して信号を印加することにより圧電素子を微動動作させる制御部10aと、を有する。
(もっと読む)
ナノピンセットおよび把持方法
【課題】アームが物体に接触したことを感度良く検出することができるナノピンセットの提供。
【解決手段】ナノピンセットは、開閉自在な一対のアームと、開閉駆動電圧が印加され、一対のアームの少なくとも一方を開閉駆動する静電アクチュエータ6と、静電アクチュエータ6が有する電気的等価回路を帰還回路として用いることにより自励発振させ、その自励発振によりアームを振動させる増幅器91と、アームの物体への接触による振動の変化を検出する振動変化検出部93とを備えたことを特徴とする。
(もっと読む)
マニピュレータ
【課題】熟練者に頼ることなく、試料台に貼り付いた試料を容易に採取することができるマニピュレータを提供する。
【解決手段】ピペット24、34の微調整のナノポジショナの駆動源に用いる圧電素子に、振動モード指示時に高周波の波形の電圧を印加するようにしたため、その振動によって、試料のベース22への貼り付きを解除することができ、試料の採取を簡便とすることができる。
(もっと読む)
マニピュレータシステム
【課題】簡単な操作でミリメートルオーダの駆動から回転モータの分解能以下の微小駆動までの動作を可能にしたマニピュレータシステムを提供すること。
【解決手段】コントローラ43は、倍率認識装置100の認識による顕微鏡倍率がX倍未満であると判別したときには、各軸の粗動用ステッピングモータ102を駆動する。この結果、XY軸テーブル36がX軸またはY軸に沿って移動し、Z軸テーブル38がZ軸に沿って移動し、インジェクションピペット34が粗動用目標位置に到達すると、XY軸テーブル36とZ軸テーブル38の駆動が停止される。その後、コントローラ43は、倍率認識装置100の認識による顕微鏡倍率がX倍以上であると判別すると、微動機構44の圧電素子54に微動用電圧V0を印加する。これにより、インジェクションピペット34が微動し、ベース22上の細胞に対する挿入位置に位置決めされる。
(もっと読む)
マニピュレータ
【課題】複数の圧電素子を個別に駆動して、各圧電素子の駆動に応じた駆動力を駆動対象に付与すること。
【解決手段】ハウジング48内に、圧電素子54、55、間座56、軸受58、60が収納され、軸受58は、間座56との当接により、軸受60は、ロックナット66との当接により、それぞれねじ軸50の軸方向への移動が規制され、ロックナット66の位置に応じた締結力が圧電素子54、55に付与される。圧電素子54に電圧V1が印加されると、圧電素子54の操作駆動に伴う押圧力がねじ軸50を介してインジェクションピペット34に付与され、細胞に針が挿入される。圧電素子55に微動用電圧V0が印加されると、圧電素子55の微動駆動に伴う押圧力が圧電素子54、ねじ軸50を介してインジェクションピペット34に付与され、インジェクションピペット3の位置が微調整される。
(もっと読む)
マニピュレータ
【課題】誤差運動が発生し難く、微細で正確な動作が可能なマニピュレータを提供する。
【解決手段】円筒形のマニピュレータ本体10と、マニピュレータ本体10に設けられたスタイラス支持手段11と、スタイラス支持手段11に略重心位置122を支持された棒状のスタイラス12と、スタイラス12を変位させる変位手段13と、を備え、スタイラス支持手段11は、弾性部材から形成される弾性支持膜111を備え、弾性支持膜111は、スタイラス12を支持する中心部113と、マニピュレータ本体10に固定された外周部114と、中心部113と外周部114との間に放射状に設けられ中心部113と外周部114とを連結する複数のリム115と、を備えるマニピュレータ1。
(もっと読む)
細胞マニピュレータ
【課題】インジェクションピペットに対する微動動作とインジェクション動作を同一の手段で実施すること。
【解決手段】細胞に針を挿入するインジェクションピペット34と、インジェクションピペット34の位置を制御するXY軸テーブル36およびZ軸テーブル38を備え、インジェクションピペット34を支持するZ軸テーブル38に微動機構44を内蔵し、微動機構44は、印加電圧に応じてインジェクションピペット34の長手方向に沿って伸縮する圧電素子54と、圧電素子54に対する印加電圧を制御する制御回路を有し、圧電素子54は、微動用電圧の印加に応答してインジェクションピペット34をその長手方向に沿って微動駆動し、インジェクション用電圧の印加に応答してインジェクションピペット34に針を挿入するための押圧力を付与する。
(もっと読む)
マイクロマニピュレータ
【課題】把持指開閉の微調整可能で操作性の高いマイクロマニュピュレータを提供する。
【解決手段】細胞ハンドリングシステムは、把持アクチュエータ71の駆動力により2本の把持指の先端部を近接させて細胞を把持するハンドリング部と、ハンドリング部をX、Y及びZ方向に移動させるX、Y、Z方向アクチュエータと、ポテンショメータ9aを有し、アクチュエータ71の駆動信号を入力するための第1コントローラと、X、Y、Zアクチュエータの駆動信号を入力するための第2コントローラと、ポテンショメータ9aから出力される電圧とホール素子715aから出力される電圧との差がゼロとなるようにアクチュエータ71の駆動を制御する把持アクチュエータ制御部70と、第2コントローラからの入力に応じたパルス数により、X、Y、Zアクチュエータの駆動を制御するX、Y、Zアクチュエータ制御部と、を備える。
(もっと読む)
移動装置及び制御方法
【課題】長時間にわたって精密移動し得るようにする。
【解決手段】移動装置1は、第1ベース板3に対して、脚部ユニット11A及び11Bにおいて永久磁石7の磁力による通常吸着と当該永久磁石7及び電磁石部12の磁力による強吸着とを切り換えながら圧電素子10の全長を伸張させることにより前後方向に移動する第1移動部5と、当該第1移動部5と同様の動作により第2ベース板4を左右方向に移動させる第2移動部6とを組み合わせたことにより、第1ベース板3に対して第2ベース板4を2軸方向に自在に移動し得ると共に、静止状態においてコイルに電流を流し続けることなく静止位置を維持することができる。
(もっと読む)
移動装置及びその動作方法
【課題】簡易な構成であり、かつ、三つの自由度を持ち、さらに、電磁石の使用を回避できる移動装置を提供する。また、X−Y方向への移動におけるエネルギー効率が良く、制御も容易な移動装置を提供する。
【解決手段】例えばX方向への移動においては、第1圧電素子11を、比較的遅い速さで伸張させる。一方、第2圧電素子12を比較的遅い速さで収縮させる。これにより、ウエイト部3だけを、X方向に移動させることができる。ついで、第1圧電素子11を、比較的速い速さで収縮させる。同時に、第2圧電素子12を、比較的速い速さで伸張させる。これにより、ウエイト部3の慣性を利用して、支持部2を、X方向に移動させることができる。このようにして、移動装置をX方向に移動させることができる。
(もっと読む)
形状記憶合金による薄板ヒンジ位置決め装置
【課題】微小移動を行う作動部を駆動するリンク機構の駆動手段として、圧電素子を用いることなく、小型で動作レンジの広い高精度位置決め装置を得る。
【解決手段】受動ジョイント部材1は、使用時に変態温度以上となって超弾性を維持する形状記憶合金からなる薄板を用い、切り抜き曲げ加工してヒンジを形成した複数のアームを備える。駆動ジョイント部材2は形状記憶合金からなる薄板で形成した複数のアームを備える。受動ジョイント部材1を形成する形状記憶合金を、駆動ジョイント部材2を形成する形状記憶合金の変態温度より低い温度で変態する素材で形成し、前記駆動ジョイント部の複数のアームに加熱手段を備える。前記アームの任意の加熱手段を加熱することにより、形状記憶合金の変態によって、受動ジョイント部材を介して操作部の位置決めを行う。その際、受動ジョイント部材1は超弾性により容易に大きく変形し、元に戻る。
(もっと読む)
ナノピンセット装置および微小試料の把持方法
【課題】 微小物体を正確に把持したり解放したりすることができるナノピンセット装置を提供すること。
【解決手段】 ナノピンセット1の静電アクチュエータ4a,4bを構成する固定電極5a,5bおよび可動電極6a,6bは、いずれも櫛歯形状を呈しており、相互に複数の櫛歯が噛み合うように対向配置されている。固定電極5a,5bは台座10に固定され、可動電極6a,6bは細いビーム状の支持部7によって台座10に弾性的に固定されている。電源回路2により固定電極5a,5bと可動電極6a,6bとの間に直流電圧を印加すると、クーロン力により可動電極6a,6bが移動してアーム3を駆動する。ナノピンセット装置50では、静電アクチュエータ4a,4bをロック状態とすることにより、微小物体を確実に把持することができる。
(もっと読む)
挟持具および挟持装置ならびに挟持方法
【課題】物体を破壊することなく確実に挟持することが可能な挟持具およびこれを用いた挟持装置ならびに挟持方法を提供する。
【解決手段】一対の支持体11と、一対の支持体11の先端側に設けられ、電圧の印加により変形する保持部12とを備えたことを特徴とするマイクロピンセット10である。また、基板を載置固定するステージと、ステージの上方に配置されたマイクロピンセット10と、マイクロピンセット10に電圧を印加する電圧印加部と、ステージまたは電圧印加部を移動させて、ステージとマイクロピンセット10の位置を調整する駆動部とを備えた挟持装置およびマイクロピンセット10を用いた挟持方法である。
(もっと読む)
外側に可動部を持たない小型ロボット
【課題】 自律推進型で外側に可動部を持たない超小型化可能なカプセルロボットを提供する。
【解決手段】 カプセルロボット(1)は、筒状の本体(3)と、この本体の内部に該本体の進行方向と平行に移動自在に収納された可動体(4)と、本体(3)内において可動体(4)を前記本体の進行方向と反対の方向には高速で移動させ、前記本体の進行方向には低速で移動させる駆動手段(5)とを備える。可動体(4)の移動により運動量保存則及び静止摩擦に基づき本体(3)を進行させる。
(もっと読む)
マイクロマニュピュレータ
【課題】顕微鏡視野内において微小物体を正確かつ迅速に取り扱うことができると共に、消費電力の小さいマイクロマニュピュレータを提供する。
【解決手段】マイクロマニュピュレータは、把持指の先端部を近接させて微小物体を把持するハンドリング部104と、ハンドリング部104をX方向及びY方向に駆動するXY駆動部101と、ハンドリング部104の把持指の先端部を中心として把持指が回動するように把持指の姿勢方向をX、Y方向で同時に変更するθz駆動部102と、ハンドリング部104をZ方向に駆動するZ駆動部103と、を備えている。Z駆動部103はθz駆動部102を介してXY方向に移動可能にXY駆動部101に支持されており、ハンドリング部104はZ方向に移動可能にZ駆動部103に支持されている。
(もっと読む)
材料及びその用途
【課題】電気メッキされたCoPtP材料は垂直磁気特性を高め、超小型電気機械システム(MEMS)デバイスの使用において有益である。
【解決手段】94−98重量%のCo,0−1重量%のPt及び2−4重量%のPの組成を有するコバルト(Co),プラチナ(Pt)及びリン(P)から構成される材料。材料はセ氏100乃至500度の温度でアニーリングされる。材料は適当な電気化学浴中で基板を電気メッキすることにより形成される。電気メッキされたCoPtP材料は基板に層を形成する。
(もっと読む)
1 - 20 / 26
[ Back to top ]