
Fターム[3C030BB04]の内容
Fターム[3C030BB04]の下位に属するFターム
スリーブ、ブッシュ (18)
Fターム[3C030BB04]に分類される特許
1 - 20 / 87
ロボットシステム
【課題】シャフトに対して環状部品を嵌合する組立作業をロボットによって自動的に行う場合に、歩留まりを向上させること。
【解決手段】ロボットシステムは、環状部品の内周面と係合する係合部材を周面に取付け可能なシャフトを把持して回動させるロボットと、前記環状部品を固定するための冶具と、前記環状部品が嵌合された前記シャフトを前記ロボットによって把持させ、該環状部品を前記冶具へ接触させた状態で、前記ロボットによって該シャフトへ回動力を付加させる制御部と、前記回動力を付加させた場合における前記ロボットの動作に基づいて前記シャフトへ前記係合部材が取付け済みか否かを判定する判定部とを備える。
(もっと読む)
自動組立装置および自動組立装置による部品組立方法

【課題】 位相合わせを必要とする部品同士の自動組立において、部品同士の位相が合ったタイミングから挿入が完了するまでの時間の長短に関わらず位相合わせ完了を的確に検知することを課題とする。
【解決手段】 第2の部品を第1の部品に接触させた状態で、第1の部品と第2の部品とを特定の回転軸に対して相対的に回転させつつ、前記回転軸周りのモーメントが予め定められた閾値を超えた場合に回転を終了させる。
(もっと読む)
レンズ押圧装置及びレンズ嵌合方法
【課題】押圧ヘッドを上方へ移動させる際にレンズの連れ上がりを防止する。
【解決手段】レンズ押圧装置10には、押圧ヘッド26の上端中央部から下端中央部まで貫通する通気孔26aが設けられるとともに、この通気孔26aからレンズ14の上面へ向けて送気する送風機28を備えている。送風機28は、送気チューブ30を備え、この送気チューブ30の先端部30aが通気孔26aの上端部に接続されている。そして、送風機28は、制御部20による制御のもと、押圧ヘッド26をレンズ14から離間させる際に、送気チューブ30及び通気孔26aを介してレンズ14の上面に送気し、レンズ14の連れ上がりを防止する。
(もっと読む)
燃料噴射弁及び2部品の結合方法
【課題】部品単品の精度の影響がなく、結合工程で2部品の位置を高精度に結合する。
【解決手段】結合する2部品15,17のうち、位置決めの必要なお互いの部分をマンドレル31で位置決めした状態で、硬い方の部材15に設けた角部15cで軟らかい方の部材17をせん断加工し、かつ、せん断しながら角部15cの側面と軟らかい部品17のせん断された面17cとを嵌合させ、続いて2部品の嵌合面を塑性結合や圧入、または溶接して結合する。
(もっと読む)
部品組み付け装置及び機械部品の製造方法
【課題】エア源を使用することなく、部品を組み付けることが可能な部品組み付け装置及び機械部品の製造方法を提供する。
【解決手段】第1のアーム12aの先端部に第1のハンド51aを有し、第1のハンド51aを用いて第1の部品を保持する第1のロボット11aと、第2のアーム12bの先端部に第2のハンド51bを有し、第2のハンド51bを用いて第1の部品に組み付けられる第2の部品を保持する第2のロボット11bと、を備え、第1のハンド51bは、第1の部品又は第2の部品を上方から押さえる押さえ部材74を有し、第2のハンド51bは、第2の部品に形成された孔に挿入され、第2の部品を保持する支持ピン55、56を有する。
(もっと読む)
ワーク搬出入装置及び乾燥処理装置
【課題】ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を提供する。
【解決手段】操作部4と、荷重バランサー装置5と、を有し、操作部4は、エアレギュレータが搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。
(もっと読む)
切削部を有するワークの把持装置及び把持方法
【課題】把持されるワークの把持部に切削部がある場合でも、ワークの位置と姿勢のずれを回避し、ワークを正しくセンタリングして把持することができるワークの把持装置及び把持方法を提供する。
【解決手段】ワーク1を把持するハンド12と、ワークを撮影するカメラ14と、ハンドを3次元的に移動可能なロボット16と、ロボットを制御するロボット制御装置18とを備える。カメラ14により、ハンド12による把持面全体を含むワークの画像5を撮影し(S1)、ロボット制御装置18により、画像5を画像処理して把持面1aに存在する切削部2aを検出し、切削部2a以外の把持面1aを把持するようにハンド12の姿勢を制御してワーク1を把持する。
(もっと読む)
隙間計測圧入方法及び装置
【課題】インジェクタ用ピエゾアクチュエータを組み付ける際の隙間計測圧入方法及び装置に関する。
【解決手段】ピストンがダイヤフラムを介して取り付けられたパイプをピエゾスタックを有するハウジングに圧入する、ピエゾアクチュエータ用圧入方法であって、予備的にパイプをハウジングに圧入する第1の圧入工程と、所定量圧入後の前記パイプの圧入圧力(P3)下において、前記ピストンと前記ピエゾスタックとの間に発生した第1の隙間量(x)を検出する隙間検出工程を有する第2の圧入工程と、前記隙間検出工程終了後、前記パイプの前記圧入圧力(P3)を開放してから、前記隙間検出工程で検出した前記第1の隙間量(x)と、前記パイプの圧入圧力(P3)を開放したことによる前記パイプの軸方向の弾性変形量とを加味して前記パイプ(3)を前記ハウジングに圧入する第3の圧入工程とを具備することを特徴とする。
(もっと読む)
等速ジョイント用ローラ装着装置
【課題】スパイダのトラニオンに対し、ローラを自動的に装着し得る装置を構成する。
【解決手段】等速ジョイント用ローラ装着装置50は、円環形状体からなる基盤62と、該基盤62の略中心に配置された台座64と、この台座64を三方向から囲繞する3個のローラ保持具66a〜66cと、軸部としての位置合わせ用軸68を有する3個の位置合わせ具70a〜70cとを具備する装着用治具52を有する。ローラ保持具66a〜66c及び位置合わせ具70a〜70cは、台座64(スパイダ16)に対して接近・離間可能である。さらに、位置合わせ具70a〜70cの各々には位置合わせ用軸68が設けられている。この位置合わせ用軸68は、トラニオン28a〜28cの軸線方向に沿って延在し、位置合わせ具70a〜70cが前進動作した際には、ローラ保持具66a〜66cのポケット部96に収容されたローラ30a、30bに通される。
(もっと読む)
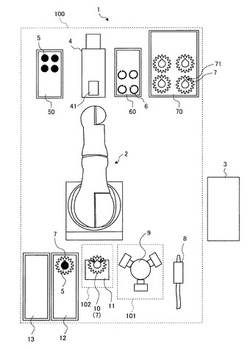
双腕ロボット
【課題】汎用性が高く複雑な組立作業ができる双腕ロボットを提供する。
【解決手段】第1アーム1は、第1ハンド2と第1視覚センサ3を有し、第1力センサ4を搭載する。第2アーム5は、第2ハンド6と第2視覚センサ7を有し、第2力センサ8を搭載する。各視覚センサ3、7で鏡筒9及び固定筒10の位置を検出して把持し、中央の組立エリア13に搬送する。フレキ9aの位置を第1視覚センサ3で測定し、フレキ9aを固定筒10の中に通し、固定筒10と鏡筒9を、力センサ4、8の出力を用いた力制御で嵌合して組み立てる。各視覚センサによって検出されたワークの位置座標を、ロボット座標に変換して各ハンドの軌道を計算し、各アームを駆動することで、2つのアームの協調動作を実現する。
(もっと読む)
圧入装置および圧入方法
【課題】圧入物を対象物の圧入部への圧入物の高い圧入精度を確保しながら、圧入作業の効率の向上が可能な圧入装置を提供する。
【解決手段】吸排気弁の弁ガイドを内燃機関のシリンダヘッド3の圧入孔に圧入する圧入装置1は、シリンダヘッド3が載置される載置台20と、作業者が両手で操作する1対の操作レバー15,16を備えるプレス機10と、載置台20を浮動状態で支持可能な支持機構と、載置台20に設けられた取っ手25と、載置台20を浮動状態で支持する浮動形態と載置台20をテーブル12に対して位置決めする位置決め形態とに前記支持機構を操作する第1,第2ボタン51,52とを備える。第1ボタン51は、片手での取っ手25による載置台20の移動操作との同時操作が可能な範囲で取っ手25に設けられる。第2ボタン52は、片手での操作レバー15の操作との同時操作が可能な範囲で操作レバー15の把持部15aの近傍に設けられる。
(もっと読む)
バルブシート圧入装置
【課題】シリンダヘッドに対するバルブシートの誤圧入を防止することができるバルブシート圧入装置を提供する。
【解決手段】円筒状のバルブシート7を外周に保持可能なパンチ22を備えるバルブシート圧入装置1である。パンチ22は、軸状のホルダ23と、ホルダ23に装着された状態でパンチ22の中心軸線Opに対して径方向外向きに付勢され、バルブシート7を保持するシート保持部Aを構成する爪部材24とを備える。爪部材24のうち、シート保持部Aを構成する突出部24aの外径面24bよりもパンチ22先端側には、バルブシート7の一端部7a側からバルブシート7内周にパンチ22を嵌挿したときにのみ、バルブシート7内周へのパンチ22の嵌挿を規制する規制部Bが設けられる。
(もっと読む)
部品組み付け装置
【課題】簡易でシンプルな機構によって構成され、円筒形中空部品の中空部に対して挿入部品の組み付けを行うことができるとともに、多品種大量生産への対応が可能な部品組み付け装置を提供する。
【解決手段】部品保持凹部24aと、部品保持溝部24bと、が形成されるワーク保持治具24を有する回転ドラム22、を備えるロータリー機構20と、円筒カム31と、挿入ピン32と、からなるカム機構30と、を備え、部品保持凹部24aに保持される円筒形中空部品1に対して、部品保持溝部24bに保持される挿入部品2を、回転ドラム22の回転によって、挿入ピン32がカム連動して該回転ドラム22の軸心方向に往復変位し、挿入ピン32によって、挿入部品2を回転ドラム22の軸心と平行に押圧しつつ、円筒形中空部品1の中空部1aに挿入部品2を挿入して、組み部品3を生成する。
(もっと読む)
圧入方法及び圧入装置
【課題】生産ロットの切替え(ロット数や機種の変更)の際に生産ラインを一旦停止することなく、且つワークや圧入部材の種類変更に伴う圧入装置の再設定に要する時間及び工数を低減できる圧入方法及び圧入装置を提供する。
【解決手段】治具置き台18に載置された吸気側圧入治具28aにバルブシート24a及びバルブガイド26aをセットする。次いで、シリンダヘッド22を保持した吸気側圧入治具28aを圧入ステーション20に搬入した後、圧入ユニット29を用いて、バルブシート24a及びバルブガイド26aを吸気側圧入治具28aから取り外してシリンダヘッド22の複数の圧入部にバルブシート24a及びバルブガイド26aを圧入する。次いで、圧入ユニット29による前記圧入が完了した後、吸気側圧入治具28aを圧入ステーション20から搬出し、吸気側圧入治具28aを治具置き台18に載置する。
(もっと読む)
治具用ロボットハンドとこれを用いた治具の取付け/取外し方法
【課題】ワークの位置や姿勢にばらつきがある場合でも、ワークと干渉することなく、ワークに治具を正確に取付け/取外しすることができる治具用ロボットハンドとこれを用いた治具の取付け/取外し方法を提供する。
【解決手段】ワーク1に治具8を取付け/取外しする治具用ロボットハンド10。ワーク1又はこれに固定された固定部材5に設けられた嵌合孔7と嵌合する嵌合部分12bを先端部に有し、嵌合部分12bと嵌合孔7との嵌合により、治具の取付け/取外し方向にその軸線が位置決めされる円筒形のガイドロッド12と、搬送ロボット9のハンド取付部9aに取り付けられ、ガイドロッドの末端部12eをガイドロッドの移動及び揺動に追従可能に保持する追従機構14と、治具8を把持/開放可能な把持装置16と、把持装置をガイドロッドの軸線に沿って昇降させる昇降装置18とを備える。
(もっと読む)
オイルシール圧入装置
【課題】多様な車種の差動装置の出力軸とケーシングとの間隙をシールすることができるオイルシール圧入装置を提供する。
【解決手段】前記差動装置を車幅方向に押圧して該差動装置の車幅方向における位置を決めるとともに、前記差動装置に圧入されるオイルシールを外嵌させて該差動装置の出力軸とケーシングとの間へと案内する位置決め金具16a、16bを有する一対の位置決め治具5a、5bと、該位置決め治具により位置決めされた差動装置に対してオイルシールを圧入する一対の圧入治具6a、6bと、前記位置決め治具を差動装置に対して車幅方向に移動させ、前記位置決め治具で前記差動装置を押圧して該差動装置をオイルシールの圧入作業位置に位置決めする位置決め状態を保持する一対の第1の移動手段4a、4bと、前記圧入治具を差動装置に対して車幅方向に移動させる一対の第2の移動手段3a、3bとを備える。
(もっと読む)
インサートナット載置支援装置
【課題】 効率よくインサートナットを成形品に載置することができることに加え、簡素な構造で、小型、安価であると共に設置面積が小さくてよいインサートナット載置支援装置を提供する。
【解決手段】 正規の姿勢のインサートナットNを蓄積するインサート蓄積スリーブ210と、インサート蓄積スリーブ210に蓄積されたインサートナットNのネジ孔を貫通すると共にインサート蓄積スリーブ210から突出する先端220fまで延び、インサート蓄積スリーブ210から放出されるインサートナットNを成形品の凹部に案内するインサート案内ピン220と、インサート蓄積スリーブ210の先端210fに設けられ、インサート蓄積スリーブ210に蓄積されたインサートナットNをトリガ操作に応じて1つずつ放出するインサート放出ヘッド230とを有している。
(もっと読む)
バッテリパックの組み立て設備
【課題】バッテリパックの製造コストおよび重量の低減が図られるバッテリパックの組み立て設備、を提供する。
【解決手段】バッテリパックの組み立て設備は、バッテリスタック50にロアケース61を組み付けるための設備である。組み立て設備は、バッテリスタック50を持ち上げるとともに、バッテリスタック50に対してロアケース61を仮保持するハンガー21と、ハンガー21に設けられ、バッテリスタック50に対してロアケース61を位置決めする位置決め機構31とを有する。
(もっと読む)
組立装置
【課題】移動操作精度を向上させることなく、凸部の凹部への挿入を短時間で完了することができ、ロボットアームの可搬重量や可動範囲が制限されることのない組立装置を提供する。
【解決手段】凹部を有する部品101を把持して移動操作し凹部103に凸部が設けられた部品102の凸部を挿入させるロボットアーム1と、凸部が設けられた部品102を保持する保持台と、保持台4に設けられ凹部103に凸部を挿入させようとしたときに凹部を有する部品101または凸部が設けられた部品102が受ける並進力及び/又はこれらの軸周りのモーメントを検出する力覚センサ2と、保持台4を移動操作するアクチュエータ5とを備え、力覚センサ2により検出された並進力及び/又はモーメントに基づき、凸部の先端部の当接位置の凹部103の中心からの方向及び距離を算出し、これらに応じて保持台4を移動操作し、凸部を凹部103に挿入させる。
(もっと読む)
ワークの分離装置、ワークの分離方法、ニードルベアリングの製造方法、カムフォロアの製造方法、ニードルベアリング、並びにカムフォロア
【課題】搬送されるワークの詰まりを防止するとともに、搬送したワークの位置を安定させることが可能なワークの分離を提供する。
【解決手段】棒状の形状を有し、自身の軸線方向に連続して複数搬送されるワークW2から一つのワークを分離するワークの分離装置4であって、ワークを水平面に平行でワークの軸線に沿った第一の搬送方向D1に搬送する第一の搬送手段と、水平面に平行に配置された支持面42aが設けられ、第一の搬送手段により支持面上の第一の位置P1にワークが投入される支持台42と、支持面上を第一の搬送方向に交差する第二の搬送方向E1に、第一の位置から段部42bが設けられた第二の位置P2までワークを搬送する押圧面41aを有する第二の搬送手段45とを備え、段部では、第二の位置から第二の搬送方向側の支持面は、所定量だけ下方にオフセットされている。
(もっと読む)
1 - 20 / 87
[ Back to top ]