
Fターム[3C048CC20]の内容
Fターム[3C048CC20]に分類される特許
1 - 20 / 20
工作機械
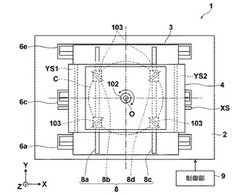
【課題】1軸方向に移動自在なサドルに1軸方向と直交する方向に移動するテーブルを搭載した工作機械において、テーブルに発生するヨーイングを補正する。
【解決手段】サドル3上にY軸方向に所定間隔をあけてX軸方向に移動する一対のリニアモータ7を配置するとともに、Y軸方向と平行となるようにY軸ガイド8を取り付ける。テーブル4をY軸ガイド8に、X軸方向には固定的に、テーブル4を通るZ軸回りには所定量回動可能に連結する。テーブル4のX軸方向の両端部分のY軸方向における位置を検出し、この検出位置に基づいて各リニアモータ7の位置を制御する。
(もっと読む)
移動装置

【課題】リニアモータにより移動合体を1軸方向に移動させる移動装置において、装置の大型化を回避しつつ、移動合体の姿勢を制御する。
【解決手段】回転型モータ7を、回転子7aの回転軸Arが移動合体MUの重心Gを通り、且つ重心Gとリニアモータ53の移動軌跡Sとを含む平面Pと交差するように移動体Mに固定する。回転型モータ7の回転子7aの回転が、リニアモータ53の移動によって移動合体MUに作用する回転トルクTの少なくとも一部を相殺する反回転トルクHTを発生するように制御する。
(もっと読む)
滑動テーブル
【課題】テーブル板の支持ユニットのサイズが比較的に小さく、そしてテーブル板を大きな角度で回転移動させることができる滑動テーブルを提供すること。
【解決手段】基台11の上に支持装置を介して滑動可能に支持されたテーブル板13を備え、そして上記支持装置が、基台に固定された中央に開口部を備える支持板22と、その上下の各表面に複数個の球体23を介して接触配置され且つ互いに上記開口部を通る支柱を介して接合された上側可動板24及び下側可動板と、複数個の球体23を保持する球体保持板47とを有する、テーブル板の下面中央に配置された主支持ユニット21、および基台に固定された支持板42と、支持板の上面に複数個の球体43を介して接触配置された可動板44と、複数個の球体43を保持する球体保持板47と、球体保持板の移動距離を制限する手段48とを有する、主支持ユニット21の周囲に配置された複数個の副支持ユニット41からなる滑動テーブル。
(もっと読む)
加工装置
【課題】加工工具を被加工物に対して走査させる形状加工の加工精度を向上させる。
【解決手段】加工工具23を被加工物Wに対して走査させることで形状加工する加工装置において、X、Y、Zステージ4、5、6の姿勢誤差をそれぞれ検出し、各ステージの基準点に対する加工点W1の相対位置と姿勢誤差とから加工点W1の変位量を求める。被加工物上の加工点W1の変位量に基づいて、数値演算装置12に登録された各ステージの目標位置を補正することで、ステージの姿勢誤差に起因する加工点W1の位置ずれを防ぎ、加工精度を向上させる。
(もっと読む)
加工機械の縦方向軸の制御方法
【課題】 縦方向駆動軸がハイリードボールネジ、リニアモータにより駆動されるので駆動トルクや加工推力を大きくすることは出来ないという欠点を取り除き、縦駆動軸の推力増加方法を提供すること。
【解決手段】 カウンターバランスの調節機構により制御される縦方向駆動軸を支えた縦方向軸本体を有する加工装置の縦方向軸制御方法において、縦方向主軸本体の駆動方向や目標位置との偏差または軸駆動モータの駆動電流の変化を測定し、カウンターバランスの調節機構を制御し、前記縦方向主軸本体の重力を駆動トルクや加工推力に利用する、ことを特徴とする縦方向軸制御方法。
(もっと読む)
位置決めステージ
【課題】ステージの移動方向の剛性を向上させる。
【解決手段】位置決めステージにおいて、ステージ1の移動方向の位置検出点とステージ1が振動して姿勢変化したときにステージ1の位置が変動しない節の位置を合わせる。この位置を合わせるために、ステージ1の重量分布を調整するための第1の錘11及び第2の錘12を有している。そして、ステージ1の伝達特性の振動モードが0dBに近づくように第1の錘11及び第2の錘12の調整量を決定する。
(もっと読む)
移動テーブル
【課題】摩擦要素を用いることなくテーブルの移動抵抗をより滑らかに変動させることが可能な移動テーブルを提供する。
【解決手段】基台20と、基台20に設けられた案内面と、案内面に沿う方向である案内方向に、移動可能あるいは旋回可能に構成されたテーブル30と、テーブル30を案内方向に移動あるいは旋回させるテーブル駆動手段40と、を備えた移動テーブル10において、テーブル30を移動あるいは旋回させる際に発生する抵抗である移動抵抗の大きさを、テーブル30を案内面に接触させることなく変更可能な移動抵抗可変手段(21、22、31、32)を備えている。
(もっと読む)
ゴニオステージ装置
【課題】従来より小型化が可能なゴニオステージ装置を提供する。
【解決手段】一部に球面部分112を有するテーブル部110と、前記球面部分112に当接して、前記テーブル部110を3点支持する支持部材211a〜211cと、前記テーブル部110に連結されて、前記テーブル部100のテーブル面111の向きを操作する面方向操作部220と、前記面方向操作部220の位置を変化させる面方向操作駆動部240と、前記テーブル部110と一体をなし、前記テーブル部110を、テーブル面111に垂直な軸を中心に回転させる回転操作部230と、前記回転操作部230の位置を変化させる回転操作駆動部250とを備える。
(もっと読む)
旋回装置
【課題】旋回部材を支持した移動部材を軽量化し、高速、高加減速化に好適な旋回装置を提供する。
【解決手段】案内部材11a、11bに直線移動可能に支持された移動部材13と、移動部材上に旋回可能に支持され径方向の両端部に連結部15a、15bを設けた旋回部材15と、旋回部材を挟んで両側に移動部材の移動方向と平行な方向に摺動可能に設けられた一対の摺動部材23、24と、一対の摺動部材をそれぞれ摺動させる一対の送り機構30、33と、旋回部材の各連結部と一対の摺動部材を、旋回部材の旋回に伴う各連結部の移動部材の移動方向と直交する方向の変位成分を吸収してそれぞれ連結する連結機構43、44とによって構成した。
(もっと読む)
位置決め装置及び位置決め方法
【課題】被案内体の案内体に対する位置決め精度を向上することができる位置決め装置、及び位置決め方法を得る。
【解決手段】位置決め装置10は、ガイドブロック28がガイドレール26に対し所定軌道を運動可能となるように転動体を介して支持されて構成されたリニアガイド14と、ガイドブロック28に移動力を付与するサーボ機構18と、ガイドレール26及びガイドブロック28に超音波振動を付加するための加振装置22と、加振装置22及びサーボ機構18を制御する制御装置24とを備える。制御装置24は、ガイドブロック28のガイドレール26に対する位置決めが完了する前に、加振装置22を作動してガイドレール26、ガイドブロック28に超音波振動を付加させ、かつガイドブロック28のガイドレール26に対する位置決めが完了する直前に、ガイドレール26、ガイドブロック28への超音波振動の付加を停止する。
(もっと読む)
消振システム
【課題】 複数個の慣性力発生装置により、ステージ装置からテーブルが受ける力を外部に影響を与えることなく小さくすることができ、さらに、同じ慣性力発生装置により、設置床等からの振動を打ち消す。
【解決手段】 駆動装置によってウェイトを動かして慣性力を発生する複数個の慣性力発生装置11a〜11dと、ステージ装置2の可動部の動きを検出する動き検出器12と、動き検出器からの信号に基づいて指示値を算出する演算装置13とを有し、演算装置13により算出した指示値を操作量として、慣性力発生装置の駆動装置により、ウェイトの少なくとも2つを異なる方向に移動し、これらのウェイトの慣性力により、ステージ装置2が発生するテーブルの振動を低減させる、ことを特徴とする。
(もっと読む)
ステージ装置
【課題】ワーク載置部を支持する石定盤を不要にしてステージに位置検出精度を確保する。
【解決手段】スライダ32A、32Bは、ガイド部14の左右側面及び上面に対向するように逆U字状に形成されており、ガイド部14A,14Bの左右側面に対向するヨーパッド34,35と、Z方向で対向するリフトパッド36とを有する。また、ガイド部の左右側面には、一対のリニアスケール22A、22Bが設けられている。第1のリニアスケールは、ガイド部14Aの左側面に対するYステージ18の移動位置を測定する。また、第2のリニアスケールは、第1のリニアスケールが配されたガイド部の左側面と平行な反対側の右側面に対するYステージの移動位置を測定する。
(もっと読む)
ステージ装置
【課題】本発明はワークが載置される吸着板を支持する石定盤を不要にしてワークの大型化に対応すると共に、ステージの位置精度を確保することを課題とする。
【解決手段】ステージ装置10は、床面に固定された架台12と、架台12上に支持された一対のガイド部14A,14Bと、一対のガイド部14A,14B間に横架されて両端を架台12上に支持された複数の梁16と、一対のガイド部14A,14Bに沿ってY方向に移動するYステージ18と、Yステージ18の両端部をY方向に駆動する一対のリニアモータ20A,20Bとを有する。また、梁16には、平板状のワークが載置される吸着板24が載置される。ワークの面積が大型化されてYステージ18の移動距離を延長する場合には、ガイド部14A,14Bを延長することにより対応することが可能である。
(もっと読む)
移動装置及び制御方法
【課題】長時間にわたって精密移動し得るようにする。
【解決手段】移動装置1は、第1ベース板3に対して、脚部ユニット11A及び11Bにおいて永久磁石7の磁力による通常吸着と当該永久磁石7及び電磁石部12の磁力による強吸着とを切り換えながら圧電素子10の全長を伸張させることにより前後方向に移動する第1移動部5と、当該第1移動部5と同様の動作により第2ベース板4を左右方向に移動させる第2移動部6とを組み合わせたことにより、第1ベース板3に対して第2ベース板4を2軸方向に自在に移動し得ると共に、静止状態においてコイルに電流を流し続けることなく静止位置を維持することができる。
(もっと読む)
位置決めステージ
【課題】 ワークに水平(θ)方向のずれが生じてもアーム部材上でずれを補正することが可能な位置決めステージを実現する。
【解決手段】 X軸方向にスライダを移動する一対のX軸リニアモータ31、32を平行配置し、前記一対のX軸リニアモータ31、32のスライダ間に橋渡ししたブリッジ部材にY軸リニアモータ300を設け、前記Y軸リニアモータのスライダに搭載したツールを用いてワーク2に対して所定の処理をする位置決めステージにおいて、前記ワーク2を支持してX軸方向に移動し、ステージの外に対してワーク2の受け渡しを行うワーク搬送手段を備え、該搬送手段は前記ワーク2を水平(θ)方向に回動させる回動手段を備えた位置決めステージを実現する。
(もっと読む)
ワーク支持装置
【課題】ワーク支持体を原位置へ復帰させる機構をコンパクトにしつつ、ワーク支持体を一定の力で支持位置に安定した状態にロックすることができるワーク支持装置を提供する。
【解決手段】ワーク支持装置10は、ワーク支持体Tを支持位置から原位置へ復帰させる原位置復帰機構Hを備えている。原位置復帰機構Hは、軸部材17と、ワーク支持体Tに連結されているとともに、軸部材17の外周側に該軸部材17に対して相対移動可能に装着された第1及び第2可動部材21,22とを有している。また、原位置復帰機構Hは、第1可動部材21と第2可動部材22との間、及び第1可動部材21と軸部材17との間に、異なる磁極で着磁されたマグネット19,20,23が対向配置された磁気ばね機構より構成されている。
(もっと読む)
パラレルメカニズム及びそのキャリブレーション方法
【課題】キャリブレーションの実施に費やす作業時間を短縮すること及び機構パラメータの良好な同定精度を得ることを可能としたパラレルメカニズム及びそのキャリブレーション方法を提供する。
【解決手段】直交座標系で与えられるリンクヘッの回動位置及び移動位置に対応する指令値を機構パラメータに基づいてアクチュエータ356〜359に対する指令値に変換し、アクチュエータ356〜359を制御する制御部3を備え、この制御部3は、リンクヘッドに所定の回動量及び移動量で動作させたときのアクチュエータ356〜359に対する指令値とそのときの検出器380の出力値とに基づいて機構パラメータを補正する。
(もっと読む)
芯押台
【課題】 加工時、芯押軸を確実にクランプして芯押軸のビビリを抑え、ワークの加工精度を維持すると共に、芯押軸の軸受け部材が摩耗した場合、軸受け部材の交換を容易に実行可能な芯押台を提供する。
【解決手段】 貫通孔を有する本体と、前記貫通孔に挿通されて摺動および回転可能に支持される芯押軸と、芯押軸を駆動してワークに押圧させる流体圧駆動装置とを備える芯押台において、芯押台は、前記貫通孔と芯押軸との間にワーク側および反ワーク側からそれぞれ挿通可能で互いに軸線方向に離間する一対の軸受け部材が設けられると共に、クランプ装置が設けられ、クランプ装置は、一対の軸受け部材間において芯押軸を囲繞して配設される中空部材と、中空部材の内部空間に高圧流体を供給する高圧流体供給装置とを含み、中空部材は、本体に固定されると共に、半径方向内側部分が高圧流体の流入に伴って縮径して芯押軸を押圧する。
(もっと読む)
テーブル装置及び当該テーブル装置を備えた工作機械
【課題】 テーブルの下面と補助支持部との距離を連続的に調整できるテーブル装置及び当該テーブル装置を備えた工作機械を提供する。
【解決手段】 マシニングセンタのテーブル装置30は、回転テーブル33に生じる上下振動を抑制できる振動抑制機構を有する。この振動抑制機構では、ベース32側に固定されたカムフォロア63に、回転テーブル33の前端部近傍と後端部近傍の各下面に設けられたテーブル支持ブロック65を当接させ、回転テーブル33の上下振動を抑制する。さらに、テーブル支持ブロック65は、カムフォロア63側に向かって移動可能に支持され、ブロック位置調整ネジによりカムフォロア63側に付勢されることにより、テーブル支持ブロック65がカムフォロア63側に連続的に移動する。よって、カムフォロア63とテーブル支持ブロック65との距離を連続的に調整できる。
(もっと読む)
ワーク位置決めステージ及びワーク位置決めステージ用アーム
【課題】テーブルを移動させるモータを固定できてモータ移動によるトラブルがなく、モータの制御が容易で、バックラッシュの生じないワーク位置決めステージを開発する。
【解決手段】XY両方向に摺動自在な軸3の上部にテーブルを設け、基端部が回動自在に支持された2本のアーム5をX字状に交叉して設ける。該アームには、各々内部を前記軸が摺動する長穴6を設け、前記アームの各長穴の交叉部において前記軸が長穴に挿通している。2本のアームを回動することでテーブルが任意の位置に移動する。モータ7が固定で移動しないので、モータ移動によるトラブルがなく、テーブルを任意の位置に移動する場合、アームの回動速度は全く任意であるので、駆動モータの制御がきわめて容易である。
(もっと読む)
1 - 20 / 20
[ Back to top ]