
Fターム[3C269AB33]の内容
数値制御 (19,287) | 作業内容、対象機器、対象製品 (2,914) | 産業用ロボット、マニピュレータ (633)
Fターム[3C269AB33]に分類される特許
21 - 40 / 633
プログラム生成装置及びその方法
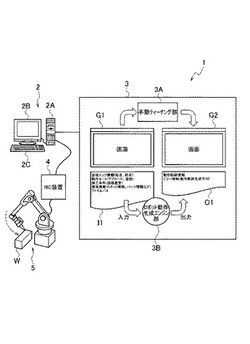
【課題】プログラミング生成装置におけるロボット自動生成処理において、編集作業が容易となるようジョイント(Joint)動作を直線に分割する。
【解決手段】ロボットの動作を制御するための動作プログラムを軌跡情報に基づき生成するプログラム生成装置1である。そして、前記軌跡情報は複数の動作点を有し、前記複数の動作点の中から適数の動作点を選択する選択手段と、前記選択された動作点を直線でつなげて直線動作に係る変更後の軌跡情報を生成する軌跡情報変更手段とを備える。
(もっと読む)
ロボットとその制御方法

【課題】ロボットが複数の動作を実行する場合に、そのうちの特定の動作に制限されずに、各動作における条件の変化を考慮して、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができるロボットとその制御方法を提供する。
【解決手段】複数の動作を実行するロボット10の制御方法であって、エンドエフェクタ12に作用する外力を検出する力センサ14と、3次元空間内でエンドエフェクタの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置20とを備え、(A)外力の閾値をロボットの動作毎に記憶し、(B)ロボットアームを制御して各動作を順次実行し、(C)各動作の実行中に力センサで検出された外力が、前記閾値を超えた場合に、ロボットアームを停止する。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、先端2軸直交点(第5軸と第6軸との交点)をロボット座標のX軸上の複数の移動目標位置(白抜き丸印)に移動させる。各移動目標位置で、発光ダイオードを第6軸を中心に回転させてその回転軌跡を3次元計測器により計測すると共に、発光ダイオードを第5軸を中心に回転させてその回転軌跡を3次元計測器により計測する。そして、2つの回転軌跡から2つの回転中心線を求め、両回転中心線の交点を先端2軸直交点の実際の移動位置(×印)とし、移動目標位置と実際の移動位置との誤差から軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
学習制御機能を備えたロボット
【課題】従来、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部(1)と、ロボット機構部の動作を制御する制御装置(2)とを含み、制御装置(2)は、ロボット機構部の動作を制御する通常制御部(4)と、作業プログラムに指定された教示速度に、速度変化比を乗算した速度指令にてロボット機構部(1)を動作させたときに、センサにより検出された結果から、ロボット機構部の制御対象の軌跡又は位置を目標軌跡又は目標位置に近づけるため、もしくは制御対象の振動を抑制するための学習補正量を算出する学習を行う学習制御部(3)と、を有し、ロボット機構部の制御対象位置が速度変化比に依らず一定の軌跡を移動するように処理を行うことを特徴とする。
(もっと読む)
携帯遠隔操作装置およびロボットシステム
【課題】表示部へ表示された教示データから容易にコマンドを視認することができること。
【解決手段】所定の動作をロボットへ実行させる命令ごとに表示色を設定し、設定された表示色を命令に関連付けて記憶する。また、命令をロボットへ教示するティーチングによって作成された教示データを命令に関連付けられて記憶された表示色に基づいて表示部へ表示する。さらに、表示部へ表示された教示データの表示色を所定の操作によって設定された表示色へ一時的に変更して表示部へ表示するよう携帯遠隔操作装置およびロボットシステムを構成する。
(もっと読む)
溶接ロボット制御装置
【課題】
レーザセンサを用いて相対位置方式により教示点の位置補正を行う場合、レーザセンサの着脱等により溶接トーチとの取付位置関係が狂うと、教示修正に多大な時間を要する。
【解決手段】
S10でレーザセンサと溶接トーチ間のキャリブレーションを行い、新センサ−トーチ変換行列CT2Tを得て、S20で記憶部に格納する。S30で差分変換行列OTNの演算を行う。S40で予め選択しておいた作業プログラムに対して、センシング命令に記憶された検出基準点を探索する。S50で、見つけ出した検出基準点に対してそれぞれ差分変換行列OTNを乗算して、検出基準点を更新する。
(もっと読む)
溶接位置検出方法、及び溶接位置検出装置
【課題】
溶接線の進行方向が大きく変化するワークに対してセンシングを行う場合、進行方向の変化に応じてロボットの姿勢を変更する必要がある。このため、教示に時間を要したり、ロボットがワークや治具等と干渉したりする。
【解決手段】
マニピュレータM1に取付けられた溶接トーチ14に対して開先位置検出センサLSが可動機構62を介して設けられる。溶接線の進行方向が変化する場合は、開先位置検出センサLSの溶接トーチ14に対する相対位置であるセンシング位置を、ロボットの姿勢変更により変更するのではなく、可動機構62により変更するようにしている。教示工数低減、干渉低減を図ることができる。
(もっと読む)
ロボット、ロボット制御装置、ロボット制御方法、およびプログラム
【課題】ロボットの姿勢ごとのハンドに加わる重力の影響を適切に補正するロボット、ロボット制御装置、ロボット制御方法、およびロボット制御プログラムを提供することを目的としている。
【解決手段】ハンドとアーム2との間に介挿されている力センサー30に対して入力される重力の影響をモデル化した定数を有するモデル式を記憶する記憶部104と、ハンドが対象物を把持していない状態における力センサーが出力する検出値を用いて、モデル式の定数の値を算出する変数算出部106と、変数算出部が算出した定数をモデル式に代入して力センサーに対して入力される重力の影響の補正値を算出し、力センサーが出力する検出値から算出した補正値を差し引くことで、力センサーの検出値を補正する補正部107とを備える。
(もっと読む)
ロボット、及びロボットの制御方法
【課題】最大定格出力に近い駆動条件であっても、本来の駆動性能を発揮することが可能なロボットを提供すること。
【解決手段】多軸ロボットは、第1の駆動電圧を供給する第1電源回路1と、第1の駆動電圧よりも高い電圧である第2の駆動電圧を供給する第2電源回路2と、第1電源回路1と第2電源回路2とを切り替えるスイッチ21〜26とを備えている。そして、モーター部11〜16の駆動条件を規定する制御信号が所定の閾値以上になった場合に、スイッチ21〜26を駆動して第1電源回路1から高電圧の第2電源回路2に切り替えることにより、十分な駆動電圧が確保されるため、期待通りの動作を行うことができる。換言すれば、制御信号から駆動電力が不足しそうな状況を予測して、第2電源回路2に切り替えることにより、決められた作業時間(タクトタイム)で、作業に必要な動作を行うことができる。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】ロボットアームの先端のフランジに発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、手先が正しく移動目標位置に移動したときの発光ダイオードの位置と実際の移動位置とを基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
産業用ロボットの速度指令プロファイルの生成方法
【課題】多関節型ロボットの作業時間を短縮することができる速度指令プロファイルを生成するためには、広い範囲の動作区間に柔軟に対応でき、変化の傾向が把握し易い加減速特性の決定方法が必要とされる。
【解決手段】加減速時間と命令速度の関係を示す第1の加減速特性と、加減速時間と命令速度の関係を示しており第1の加減速特性と比べて同じ命令速度の場合に加減速時間が短い第2の加減速特性とを用いる。動作区間距離が長区間と判定された場合には、第1の加減速特性を用いて速度指令プロファイルを求める。短区間と判定された場合には、第2の加減速特性と予め決められた演算式により新たな加減速時間と命令速度の関係を示す新たな加減速特性を算出し、長区間と判定された場合とは異なる加速度指令プロファイルを使用し、さらにローパスフィルタを用いて、短区間の速度指令プロファイルを生成する。
(もっと読む)
振動抑制方法
【課題】加速または減速運動に伴って運動体に生じるn自由度かつ時変の振動を、インプットシェイピング法を適用して効果的に抑制する振動抑制方法を提供する。
【解決手段】運動体に付加された第1の入力によって運動体に生じる第1の応答に、第1の応答の変位が0となる時刻において、第2の入力を運動体に付加して生じる第2の応答を重ね合わせて、互いに打ち消し合うインプットシェイピング法を適用する場合に、n自由度かつ時変の振動における複数のモード間のエネルギの移り変わりのうち、モード間の相互作用によるものを無視し、固有振動数および減衰比の変化によるものを考慮して、第1の入力に対する第2の入力の大きさを決定する。
(もっと読む)
ロボットの故障検出方法、ロボット
【課題】ロボットの故障検出方法を提供する。
【解決手段】ロボット1の故障検出方法は、関節J1〜J6と、これら関節に連結されるアーム13〜18と、関節J1〜J6それぞれの回転角度を検出するエンコーダー40と、アームのいずれかに取り付けられたジャイロセンサー30と、を有するロボットの故障検出方法であって、エンコーダー40またはジャイロセンサー30の異常を判定する閾値を決定する工程と、エンコーダー40によって関節角度を取得する工程と、関節角度を近似微分して関節角速度を算出する工程と、関節角速度をジャイロセンサー位置の座標系角速度に変換する工程と、ジャイロセンサーによって角速度を取得する工程と、ジャイロセンサーにより取得した角速度と座標系角速度との角速度差、または角速度比を演算する工程と、角速度差、または角速度比と、閾値とを比較する工程と、を含む。
(もっと読む)
部品製造ラインの設計支援方法及び設計支援システム
【課題】部品製造装置と、該部品製造装置に対してワークを搬入及び/又は搬出するロボットとが備えられた部品製造ラインにおいて、前記部品製造装置の周辺設備等との干渉を回避しながら、前記ロボットの搬送能力を有効に活用して、生産性を向上させる。
【解決手段】ロボットのアーム先端部に設定された基準点の移動経路を規定するための必要最小限の制御点を設定する制御点設定工程と、前記部品製造装置に対してワークを搬入及び/又は搬出する際に、該部品製造装置の周辺設備との干渉を生じない該装置内でのワークの配置領域を規定するSPM曲線を作成するSPM曲線作成工程と、前記制御点設定工程で設定した制御点と、前記SPM曲線作成工程で作成したSPM曲線と、成形対象のワーク形状とに基づき、該ワークを搬送する際のロボットの搬送モーションを決定する搬送モーション決定工程とを実行する。
(もっと読む)
フィードバック制御装置、フィードバック制御方法、モータ及びロボット
【課題】所定動作量(例えば動作速度)以下においても位置決め精度の低下や振動の抑制を図ることを目的とする。
【解決手段】制御対象の動作状態を検出する状態検出器を介して、フィードバック信号を取得するフィードバック信号取得手段と、前記フィードバック信号取得手段で取得したフィードバック信号から誤差成分の周期情報を検出する誤差周期検出手段と、制御指令信号、又は前記フィードバック信号と、前記誤差周期検出手段で検出した周期情報とに基づき、前記誤差成分の周波数を算出する誤差周波数算出手段と、前記誤差周波数算出手段で算出した周波数の信号成分を除去するフィルタを用いて、前記制御対象に出力する制御信号をフィルタリングするフィルタリング手段と、前記制御指令信号の示す動作量又は前記フィードバック信号の示す動作量に基づき、フィルタ形状を算出するフィルタ形状算出手段と、を備える。
(もっと読む)
駆動軸共有装置および駆動軸共有方法
【課題】専用の制御装置を用いることなく、1つの共有駆動軸を複数の制御装置によって駆動制御することができ、構造が簡単であるとともに、低コストで実現することが可能な、駆動軸共有装置および駆動軸共有方法を提供する。
【解決手段】駆動軸共有装置10は、共有駆動軸20と、共有駆動軸20に連結され、共有駆動軸20を駆動する第1の駆動装置31および第2の駆動装置32とを備えている。第1の駆動装置31および第2の駆動装置32は、第1の制御装置40および第2の制御装置50によってそれぞれ制御される。第1の制御装置40は、第2の駆動装置32によって共有駆動軸20が駆動されていないとき、第1の駆動装置31により共有駆動軸20を排他的に駆動する。第2の制御装置50は、第1の駆動装置31によって共有駆動軸20が駆動されていないとき、第2の駆動装置32により共有駆動軸20を排他的に駆動する。
(もっと読む)
学習制御機能を備えたスポット溶接ロボット
【課題】従来のスポット溶接ロボットは、ロボットの高速動作によって発生する軌跡誤差や振動成分によって、ロボットの最適動作が阻害されるという問題があった。
【解決手段】本発明のスポット溶接ロボットは、制御対象部位とセンサとを備えたロボット機構部(1)と、制御対象部位の目標軌跡または目標位置に関する位置指令データを取得し、位置偏差データに従って、ロボット機構部を所定の動作速度で動作させる動作制御部(4)と、センサの検出結果から制御対象部位の軌跡または位置を算出し、軌跡誤差または位置誤差を補正するための、もしくは振動を抑制するための、学習補正量を算出する学習制御部(3)と、を有し、動作制御部は、学習補正量を用いて位置偏差データを補正し、学習制御部は、学習補正量を算出する過程で、最大動作速度に至るまで1回又は複数回に渡って動作速度を増加させながら学習補正量を算出する、ことを特徴とする。
(もっと読む)
ロボット制御システム、ロボットシステム及びプログラム
【課題】 動作の記述に用いられる命令の処理対象が集合パラメーターであったとしても、動作における命令の構成を変更することなく、容易に所望の動作を実現するロボット制御システム、ロボットシステム及びプログラム等を提供すること。
【解決手段】 ロボット制御システムは記憶部110と、命令を実行する処理部120と、処理部120の処理結果に基づきロボット30の制御を行うロボット制御部(ロボット制御装置50)を含み、記憶部110は処理部120が実行する命令の情報と命令の処理対象を表すパラメーターの情報を記憶し、処理部120は命令が複数の命令により構成されるシーケンス命令であり且つシーケンス命令のパラメーターの属性が集合パラメーターの属性である場合に、シーケンス命令を構成する複数の命令を変更することなく、パラメーターを変えながらシーケンス命令を複数回実行する。
(もっと読む)
ロボットコントローラー、簡易設置型ロボット、及び簡易設置型ロボットの制御方法
【課題】移動装置に搭載されたロボットの動作速度を該ロボットの設置された状況に応じて変更することの可能なロボットコントローラー、該ロボットコントローラーとロボットとが移動装置に搭載された簡易設置型ロボット、及び簡易設置型ロボットの制御方法を提供する。
【解決手段】ロボット20は、ロボット20の振動を検出する角速度センサー38を備えている。制御装置21は、ロボット20に試行動作を実行させ、試行動作中における角速度センサー38の計測結果を振動情報として取得するとともに、その取得した振動情報をデータベース53に記憶されているメーカー評価情報71に基づいて解析する。メーカー評価情報71には、振動情報と該振動情報が計測されるロボット20の設置状況に適した動作速度とが関連付けられている。そして、振動情報の解析結果に基づいて選択された動作速度でロボット20を動作させる。
(もっと読む)
ロボットの教示システムおよび教示方法
【課題】力制御やソフトフローティングを用いることなく、またワークを把持したロボットで作業そのものと同等の動作を必要とすることなく、組立作業の教示を行うことができるロボットの教示システムおよび教示方法を提供する。
【解決手段】ロボット1に取り付けられ、弾性的に変位可能な接触プローブ4と、ロボット1に取り付けられ、接触プローブ4と被作業対象物52との接触を検出する外力検出器2と、ロボット1の動作を制御する位置速度制御部66と、接触プローブ4の接触状態が検出された場合、接触プローブ4の位置に基づいて接触位置を導出する接触位置計算部61と、複数の接触位置から被作業対象物52の位置姿勢を計算する位置姿勢計算部62と、計算された被作業対象物52の位置姿勢に基づきロボットの組み付け作業プログラムを生成する作業プログラム生成部63を備える。
(もっと読む)
21 - 40 / 633
[ Back to top ]