
Fターム[3C269AB33]の内容
数値制御 (19,287) | 作業内容、対象機器、対象製品 (2,914) | 産業用ロボット、マニピュレータ (633)
Fターム[3C269AB33]に分類される特許
41 - 60 / 633
産業用ロボット
【課題】アラーム発生時にどのデータを記録するかは予め設定されており、運転稼動中に運転を停止させることなく、どのデータを記録するのか設定することができない。
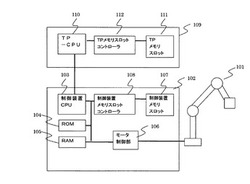
【解決手段】ロボットと、前記ロボットを制御するロボット制御装置と、前記ロボットを操作するティーチペンダントとを備えた産業用ロボットであって、前記ロボット制御装置および/または前記ティーチペンダントは記録メディアスロットを有し、前記記録メディアスロットに接続された記録メディア内に記憶されており前記産業用ロボットの動作中に記憶する情報を定義した記録方法ファイルを前記記録メディアの接続時に自動的に読み出し、前記記録方法ファイルを構成しており情報を記録するトリガとなる記録トリガの監視や記録した情報の書き出しを含む処理を行う解析用機能の実行を自動的に開始する。
(もっと読む)
ロボット教示方法、ロボット教示装置およびプログラム

【課題】ロボットが実行する作業に関する情報を簡便に教示できるロボット教示方法を提供する。
【解決手段】ロボット教示方法は、ワーク10に対して行なう作業に関わる動作をロボット1へ教示するための方法であって、ロボット1に備えられたカメラ6によって、マーカー15を有するワーク10の撮像を取得する撮影ステップ(ステップS2)と、当該撮像からマーカー15を検出する検出ステップ(ステップS3)と、マーカー15を解析して、ロボット1が動作をするための教示情報を取得する解析ステップ(ステップS4、S5)と、教示情報を記憶する記憶ステップ(ステップS6)と、を有する、ことを特徴とする。
(もっと読む)
ロボットシステムの教示データ作成方法及びロボットシステムでの溶接方法
【課題】断続溶接を確実に行うことができると共に、溶接作業時間を可及的に短くすることのできるオフライン教示データの作成方法を提供する。
【解決手段】本発明に係るロボットシステム1のオフライン教示データの作成方法は、断続溶接の溶接予定線に沿って設定されている溶接区間及び非溶接区間の順番及び区間長さ比を、溶接予定線を溶接する際にスライダ7が移動するスライダ移動線に適用することで、当該スライダ移動線上に、溶接区間に対応する第1スライダ移動区間と、非溶接区間に対応する第2スライダ移動区間とを設定しておき、少なくとも1つ以上の溶接区間での溶接が終わった際に、スライダ7が当該溶接区間に対応する第1スライダ移動区間に隣接する第2スライダ移動区間内に位置するように、教示データを作成する。
(もっと読む)
ロボットの関節の原点補正方法およびそのシステム
【課題】高精度且つ安価にロボットの関節を原点補正する。
【解決手段】第1の姿勢P1(l)のロボット12のマーカー22が撮影画像に写る位置にカメラ16を設置する。各関節用のエンコーダの出力値に基づいて、原点補正対象の関節12lに予め対応付けされた関節のみを動かすことにより、カメラ16の撮影画像上において第1の姿勢時のマーカー22の位置の近傍にマーカー22が写るような第2の姿勢P2(l)に変更する。ロボット12の姿勢変更によるカメラ16の撮影画像上におけるマーカー22の変位に基づいて、原点補正対象の関節12lの原点補正を行う。
(もっと読む)
ロボットの異常検出機能を有するロボットシステム及びその制御方法
【課題】ロボットに発生した異常を高い感度で検出することが可能なロボットシステム及びその制御方法を提供する。
【解決手段】ロボットシステム11に何らかの異常が発生した場合、位置の相違や応答性の相違によって2つの第1及び第2センサ23、24によって第1及び第2検出値に差が生じる。この差が、予め設定された所定の閾値を超える場合には、制御部13は、ロボットシステム11に何らかの異常が発生したことを検出する。2つの第1及び第2センサ23、24の第1及び第2検出値が相対的に比較されることから、検出値の信頼性が確保され、かつ、第1及び第2検出値の差によって異常状態を判断することができるので、ロボットの動作状態や配置環境の温度変化によるギアや減速機の摩擦力の変動などの不確定要素を排除することができる。検出値の差の閾値を小さく設定することができる。ロボットシステム11は高い感度で異常を検出することができる。
(もっと読む)
ロボットのコントローラ
【課題】電源からロボット用電源とコントローラ用電源とを分岐して供給する構成のロボットシステムで、大電流を流すサーキットプロテクタを設けない構成とする。
【解決手段】電源スイッチがオンされると、スイッチング制御回路が動作を開始し、コンバータ回路のスイッチング素子のオンオフ制御で制御用電源がCPUに供給され、自己の動作電源をコンバータ回路からダイオードを介して給電する。CPUにより、コンタクタがオンされてロボット用電力が供給される。電源スイッチがオフされると、CPUにより、給電監視手段によるダイオードブリッジへの給電停止の検出をもってスイッチのオフ状態が判断され、平滑コンデンサの充電電荷を電源として動作する期間中に、ロボット本体の停止制御の実行後に前記コンタクタがオフされる。
(もっと読む)
干渉回避制御装置
【課題】干渉チェックの見落としによる機器同士の干渉発生をより確実に防ぐことのできる干渉回避制御装置を得ること。
【解決手段】干渉回避制御装置は、補間制御周期での停止予定位置に基づく干渉チェックに見落としが生じうるか否かを判定する第1判定手段11と、干渉チェックに見落としが生じうると判定された見落とし区間において、1補間制御周期を整数で割った周期で停止指令を出した場合の停止予定位置を算出する第1計算手段1と、停止予定位置に基づいて動作機器と他の機器との機器間距離を算出する第2計算手段2と、3点以上の機器間距離に基づいて近似曲線を算出する第3計算手段3と、近似曲線に基づいて見落とし区間における機器間距離の最小値を算出する第1最小値算出手段4と、動作機器と他の機器とが近接した場合の近接距離と最小値とを比較して干渉の有無を判定する第2判定手段5と、を備える。
(もっと読む)
搬送装置
【課題】補正前の軌道の特性を損なうことなく、軌道の始点及び終点と目標始点及び目標終点との位置ズレに応じて設定軌道を補正する搬送装置を提供する。
【解決手段】予め設定された設定軌道Ptを用いて搬送制御するにあたり、設定軌道Ptの始点S及び終点Eが位置ズレしている場合に設定軌道Ptを補正する。設定軌道Ptの補正は、始点Sが目標点S’と一致するように終点Eを基準として設定軌道Ptを拡大又は縮小して補正する第一の補正処理と、第一の補正処理後の終点Eが目標点E’と一致するように第一の補正処理後の始点S’を基準として第一の補正処理で得られる軌道Pt’を拡大又は縮小して補正する第二の補正処理と、を実行することで行う。
(もっと読む)
溶接ロボットの一時停止解析装置および一時停止解析プログラム
【課題】様々な状況下におけるチョコ停の改善に寄与することができるとともに、経験と知識がない場合であってもチョコ停の対策を行う箇所を容易に特定することができる溶接ロボットの一時停止解析装置および一時停止解析プログラムを提供する。
【解決手段】一時停止解析装置3は、ロボットコントローラ2から、ロボット位置情報と、ロボット動作情報と、溶接条件情報と、動作エラー情報と、を取得する取得手段31と、ロボット位置情報、ロボット動作情報、溶接条件情報および動作エラー情報と、これらに対応する一時停止の推定原因および一時停止の修正方法と、が予め記載されたテーブルを参照することで、溶接ロボット1の一時停止の原因とその修正方法を解析する解析手段32と、解析手段32が解析した解析結果を出力する出力手段33と、を備える。
(もっと読む)
直進型及び回転型ロボットの制御装置
【課題】高精度な位置決めが要求される工作機械等において、比較的単純な構造を保ちつつ、迅速かつ高精度な位置決めを実現する直進型及び回転型ロボットの制御装置を提供する。
【解決手段】H無限大制御理論に基づく制御系であって、制御器は数式的に以下の3つの部分に分かれる。1)モータの速度が定常誤差なく追従できるように設計された速度制御器。2)速度制御ループを含めたモータに対して設計されたH∞角度制御器。3)ゲイン可変のフィードフォーワード制御器。制御対象の伝達関数に積分要素が含まれた場合における適切な制御が可能となる。
(もっと読む)
ロボット制御装置、ロボット制御方法、プログラム及び記録媒体
【課題】カメラの位置がばらついても、カメラ座標系とロボット座標系と校正を行うことなく、第1のワークに対するハンド部の把持位置がばらついたり第1のワークが変形したりしても、精密組立を可能とする。
【解決手段】カメラ座標系におけるハンド部の第1の座標系CA、第1のワークの第2の座標系CB、第2のワークの第3の座標系CCを算出する(S2,S3,S4)。第1の座標変換行列ATB、第2の座標変換行列ATCを算出する(S5,S6)。注目点の座標データを、第1のワークの座標系で設定する(S7)。教示点の座標データを、第2のワークの座標系で設定する(S8)。注目点の座標データを、第1の座標変換行列ATBを用いて座標変換する(S9)。教示点の座標データを、第2の座標変換行列ATCを用いて座標変換する(S10)。変換した座標データを用いて動作指令を作成する(S11)。
(もっと読む)
ロボットプログラミング装置および方法
【課題】ロボットの任意の停止状態から所望の動作を実行させる際に工程を選択できるようにプログラミングを行うロボットプログラミング装置等を提供する。
【解決手段】ロボットを使用した組み立てセルのロボットが行う独立した作業を単位とした作業ブロックを実行順に接続して工程フローを作成し、工程フローからロボットプログラムを生成する装置であり、停止ブロック検出手段で検出された停止ブロックと、表示手段に表示した停止ブロックを考慮した外部入力に従って実行ブロック指定手段から得た停止状態から実行する実行ブロックとの位置情報とハンド状態とセンサ状態をそれぞれ比較し、停止ブロックの停止状態を起点として実行ブロックを実行するための一時実行プログラムおよび一時実行作業指示を生成し、表示手段に一時実行作業指示を表示すると共に、入出力手段から一時実行プログラムを出力する工程再構築手段を備えた。
(もっと読む)
多関節型ロボットの制御装置,制御方法及び制御プログラム
【課題】多関節型ロボットの作業部の位置及び移動速度を維持しつつ,第1関節駆動系の駆動軸各々の角度を確実に作業終了点の角度に到達させること。
【解決手段】例外条件が充足していない場合はステップS5で算出される補間点に基づいて第1及び第2関節駆動系の駆動軸各々を駆動する(S64)。例外条件が充足した後(S61のYes側),作業部が作業終了点に到達するまでの間は(S12のNo側),第1関節駆動系の駆動軸各々を作業終了点の角度を目標として線形に変化させるための該第1関節駆動系の駆動軸各々の角度を算出すると共に(S8),該算出された第1関節駆動系の駆動軸各々の角度とステップS5で算出された補間点における作業部の位置とに基づいて第2関節駆動系の駆動軸各々の角度を算出し(S9),該算出結果に従って第1及び第2関節駆動系の駆動軸各々を駆動させる(S11)。
(もっと読む)
6軸ロボットの軸間オフセット検出方法
【課題】6軸ロボットにおいて、軸間オフセットのずれ量を計測しこれを補正する。
【解決手段】手先に発光ダイオードを設け、手先をロボット座標のX(Xb)軸上の複数の移動目標位置に移動させる。このとき、発光ダイオードの位置を3次元計測器により計測し、移動目標位置と実際の移動位置との誤差を基にして軸間オフセット量Fを検出する。この軸間オフセット量FによってDHパラメータを補正する。
(もっと読む)
ロボットの制御装置
【課題】円弧状部分から直線部分に入る位置を正しくティーチングできず、直線部分に入った位置をティーチングしてしまっても、ツール先端に円弧状部分により近い形状の軌跡を辿らせる。
【解決手段】4つのティーチング位置P1〜P4のうち、P1からP2の間、P3からP4の間は直線補完する。P2が作業対象部分の直線部分から円弧状部分に入った位置に正しくティーチングし、P3は円弧状部分から直線部分に入った位置をティーチングした場合、P2とP3との間は楕円で曲線補間する。この場合、P2には楕円の長径部分が接するので円に近く、P3には短径部分が接するので直線に近くなり、結果として作業対象部分の形状に近くなる。
(もっと読む)
ティーチング装置およびティーチング方法
【課題】周辺機器との干渉を抑えるために記録される位置データの容量を抑えつつ、作業者に位置データの記録操作を意識させずにティーチングを行うことができるティーチング装置を得ること。
【解決手段】ティーチング装置50は、ロボットに対して動作経路のティーチングを行うティーチング装置であって、ロボットを移動させる際に操作される入力部に対する操作内容を受信する受信部と、ロボットの位置を検出する位置検出部と、入力部に対する操作内容が切替えられたときのロボットの位置データを位置検出部に送信させる制御部と、位置検出部から送信された位置データを記録する記憶部と、を備える。
(もっと読む)
ロボットの制御方法およびロボットの制御装置
【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボット制御装置およびキャリブレーション方法
【課題】ロボットの関節軸を動作限界位置でキャリブレーションできない場合においても、限られた空間の中で精度良くキャリブレーションすることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、ロボット本体の関節軸上の任意のキャリブレーション位置に関節軸が移動された場合において、アブソリュートエンコーダから位置情報を取得し、取得した位置情報に含まれる一回転内位置が、多回転位置をカウントする基準となる原点を含まない所定の許容範囲に含まれるか否かを判定する。そして、一回転内位置が、許容範囲に含まれない場合には、一回転内位置が許容範囲に含まれるまで、キャリブレーション位置の移動を要求し、一回転内位置が許容範囲に含まれる場合には、取得した位置情報と関節軸の制御位置とに基づいて、関節軸の位置を補正するための補正値を決定する。
(もっと読む)
産業用ロボットの出力トルク制限回路
【課題】 指令トルク信号から演算により求めた産業用ロボットのツール先端での出力トルクが許容値を超えたときに駆動部の動力を遮断することで安全を確保する、出力トルクの制限回路を与えることを目的とする。
【解決手段】 モータ駆動電流指令トルク信号と、サーボモータドライバ指令トルク信号と、サーボモータドライバ推測指令トルク信号と、ロボット制御部の内部モデル推測指令トルク信号の、4つの独立した指令トルク信号から選択回路1で選択した1つの指令トルク信号からXYZ方向トルク信号に、XYZトルク信号合成回路4で合成し、XYZ方向のトルク値をXYZ方向比較回路で比較し、トルク規定値6を超える場合にサーボ動力遮断信号を発生することを特徴とする出力トルクの制限回路とした。
(もっと読む)
ロボットのコントローラ
【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
41 - 60 / 633
[ Back to top ]