
Fターム[3C269BB12]の内容
数値制御 (19,287) | 目的、目的を達成するための改良点 (2,252) | 高信頼化、安全性の向上 (566) | 制御系の監視、試験の容易化 (225)
Fターム[3C269BB12]の下位に属するFターム
プログラムのチェック (24)
Fターム[3C269BB12]に分類される特許
1 - 20 / 201
工作機械の物理データの表示機能を備えた数値制御装置
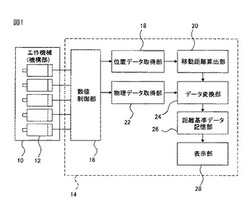
【課題】加工速度等の加工条件の変化によらず、所定位置でのデータ比較を可能とする表示機能を備えた数値制御装置の提供。
【解決手段】数値制御装置14は、予め定めた位置指令に基づいて各駆動軸12を制御する数値制御部16と、各駆動軸12及び工作機械の工具の代表点の位置データを取得する位置データ取得部18と、取得された位置データ及び工作機械10の機械構成の各部の寸法等の情報から、各駆動軸及び工具の代表点の移動距離を算出する移動距離算出部20と、各駆動軸12及び工作機械の工具の物理データを取得する物理データ取得部22と、取得された時間軸基準の物理データを、移動距離算出部20が算出した移動距離を用いて移動距離基準のデータに変換するデータ変換部24と、該移動距離基準のデータを記憶する距離基準データ記憶部26と、記憶された距離基準データを画面表示する表示部28とを有する。
(もっと読む)
速度監視装置

【課題】低い分解能の位置センサが使用でき、かつ誤検出せずに高速応答可能な速度監視装置を提供する。
【解決手段】速度監視装置は、記憶手段に、許容移動マージンPMと、1周期期間で許容される前記可動部の最大移動距離である比較速度量VCと、現在の時刻tからM周期前までにおける前記可動部の位置データP(t−nT)(nは、M以下の自然数)と、を記憶しておく。速度判定の際は、1からMまでのすべての整数nに対して、|P(t)−P(t−nT)|>VC*n+PMの成否を判定し(STEP6)、当該不等式が成立した場合には、速度超過と判定する(STEP20)。
(もっと読む)
モーター制御装置、ロボットハンド、ロボット及びモーター制御方法
【課題】回転軸の速度制御をしながらトルク限定値を超えないトルクで回転させるモーターの制御装置を提供する。
【解決手段】モーター5の回転軸5aの回転状況を検出する回転検出器19が出力する角度データ信号24及び回転速度信号29を用いてモーター5を制御する。回転軸5aの速度指令27と回転速度信号29とを用いて回転軸5aの回転速度と速度指令27との差に対応するトルク指令信号37を出力する速度制御部31と、回転軸5aに加えるトルクの最大値を示すトルク限定値を設定する限定値設定部46と、トルク指令信号37により駆動される回転軸5aのトルクをトルク限定値以下に制限するトルク限定制御部38と、を備える。
(もっと読む)
侵入検出装置,ロボット,侵入検出方法および侵入検出プログラム
【課題】特定領域への侵入を遅延無く検出する。
【解決手段】侵入検出装置は,侵入検出装置は,侵入を検出する境界に沿って前記境界に近接して配列された複数の光マークからなる光マーク列と,光らせる前記光マークを時刻によって異らせる制御信号であって,任意の時刻において,前記光マーク列の一部に対応する前記制御信号の一部は,前記光マーク列の他の一部に対応する前記制御信号の他の一部の誤り検出符号である前記制御信号を生成する点滅制御部と,前記光マーク列からの光を受光し前記光に応じた信号を出力する光センサーと,前記光センサーが出力する信号を前記光マーク毎に二値化した受光信号を生成し,前記光マーク列の他の一部に対応する前記受光信号の第一部分に基づいて前記誤り検出符号の検査値を生成し,前記光マーク列の一部に対応する前記受光信号の第二部分と前記検査値とを比較した結果に基づいて前記侵入を検出する検出部と,を備える。
(もっと読む)
機械における原点位置調整方法および原点位置調整機能を有する機械
【課題】作業時間を短くしつつ、原点位置をさらに容易に設定する。
【解決手段】位置検出器を備えたサーボモータによって駆動される可動部(10)の機械原点位置調整機能を有する機械は、位置検出器により検出された値をカウントするレファレンスカウンタ(16)と、可動部を所定の方向に移動させて機械原点位置に位置決めしたときのレファレンスカウンタの容量を記憶した記憶部(17)と、可動部を位置決めしたときのレファレンスカウンタの値を読み取るレファレンスカウンタ読取部(18)と、レファレンスカウンタのカウンタ容量を読み取るカウンタ容量読取部(19)と、レファレンスカウンタの値とレファレンスカウンタ容量とに基づいて機械原点位置の調整量を算出する調整量算出部(20)と、を含む。
(もっと読む)
工作機械の振動抑制方法および振動抑制装置
【課題】加工のヒステリシス特性によるびびり振動の再発生を効果的に防止することが可能な工作機械の振動抑制方法を提供する。
【解決手段】振動抑制方法は、回転軸の時間領域の振動を検出する第1ステップ、検出された時間領域の振動に基づいてびびり周波数を算出する第2ステップ、算出されたびびり周波数から加工情報を算出して記憶し、前に記憶された加工情報が存在しないときは、算出された加工情報を用いて安定回転速度を算出する第3ステップ、回転速度を算出した安定回転速度に変更する第4ステップ、変更した回転速度の加工情報と、記憶した加工情報を比較する第5ステップ、加工情報が改善され(びびり振動を低減させるように加工情報が変化し)、変更された回転速度の変更方向が減速方向であった場合に、最適な回転速度であると判断する第6ステップを有している。
(もっと読む)
工具の軌跡表示機能を備えた数値制御装置
【課題】加工条件変更前後での軌跡形状変化を視覚的に精度よく分析することができ、適切な駆動軸のパラメータ調整を行うことができるようにした数値制御装置の提供。
【解決手段】数値制御装置14は、予め定めた位置指令に基づいて各駆動軸12を制御する数値制御部16と、数値制御部16により駆動制御される各駆動軸12の位置データを取得する位置データ取得部18と、取得された各軸の位置データすなわち位置フィードバック及び工作機械10の機械構成の情報から、工作機械の工具先端点の座標を算出する工具座標算出部20と、算出された工具先端点の座標をフィードバック軌跡として記憶する工具軌跡記憶部22と、記憶されたフィードバック軌跡を画面表示する表示部24と、を有する。
(もっと読む)
異常判定装置、駆動装置及びロボット装置
【課題】異常判定をより短時間に行う。
【解決手段】被駆動部を駆動する駆動装置を動作させる動作電流の電流値を複数の動作パターンを有する駆動装置の動作に応じて検出する検出部と、検出部によって検出された電流値と、動作パターンごとに関連付けて予め設定された動作電流の許容範囲とに基づいて、駆動装置の動作が異常であるか否かを判定する判定部とを備える。
(もっと読む)
工作機械の衝突防止方法
【課題】工作機械の動作中に移動する主軸台のカバーと工具との衝突を確実に、かつオペレータに過度の負担をかけることなく簡単に防止できる工作機械の衝突防止方法を提供する。
【解決手段】主軸方向であるZ軸方向に移動可能な移動主軸と、当該移動主軸を軸支する移動主軸台と、Z軸方向及びZ軸に直交するX軸方向に移動可能な少なくとも一つの刃物台と、当該刃物台に取り付けられた工具タレットとを備える工作機械の衝突防止方法であって、前記移動主軸台と前記刃物台とのZ軸方向の相対距離が予め規定しているZ軸方向の許容値以下であることを検出する第一のステップと、次にその時点で加工位置に割出されている工具のX軸方向の刃先位置が、前記移動主軸台のカバーのX軸方向の長さに基づいて予め規定しているX軸方向の許容値以下であることを検出する第二のステップと、次に前記移動主軸台の移動を停止する第三のステップを備える。
(もっと読む)
工作機械における回転軸回転速度のモニタ方法及びモニタ装置、工作機械
【課題】びびり振動の抑制に対して回転軸の回転速度にかかわらず最適な変動周期を表示し、短時間で容易に最適なパラメータに設定可能とする。
【解決手段】回転速度を変動させると、モニタ14には、回転速度の変動振幅Qと変動周期Pとの関係を示す変動図20が表示され、変動図20には、現在の設定値Aの他、変動振幅Qと変動周期Pとの設定可能範囲21と、以下の式(1)に基づいた最適変動周期PO及び/又は式(2)に基づいた変動周期Pの最適範囲P1が表示される。Tは回転軸の回転周期、a,amin,amaxは予め設定される係数である。
PO=aT ・・・(1)
aminT≦P1≦amaxT ・・・(2)
(もっと読む)
加工データ修正方法
【課題】発生の可能性の高い複数のびびり振動に対して有効なびびり安定限界線図を作成して、加工データのびびり振動発生の有無を判定し、びびり振動の発生が予測される場合は加工データを修正する加工データ修正方法を提供する。
【解決手段】工具5をスピンドル7に装着した状態の加振テストから求めた主軸系のコンプライアンスの周波数応答のピークの中で、コンプライアンスの大きな複数のピークから求めた質量・減衰係数・剛性値を用いて、複数のびびり安定限界線図を作成する。複数のびびり安定限界線図の安定領域の重複する部分を安定領域とする合成びびり安定限界線図を作成する。合成びびり安定限界線図の安定領域に含まれない加工データを、安定領域に含まれるように修正する。
(もっと読む)
工具先端点の加速度または加加速度の表示部を備えた工具軌跡表示装置
【課題】駆動軸または工具の指令位置に対する実位置の形状誤差の分析を容易に行う。
【解決手段】工具軌跡表示装置(20)は、複数の駆動軸の位置指令の指令値時系列データ、複数の駆動軸の位置検出値の検出値時系列データおよび工作機械の構成に基づいて工具指令座標値および工具実座標値を算出する工具座標値算出部(22)と、工具指令座標値および工具実座標値における工具の先端点の加速度を算出する加速度算出部(23)と、工具指令座標値および工具実座標値の加速度の表示形式を選択する表示形式選択部(24)と、を具備し、表示形式選択部は、加速度の向きと大きさとに応じて工具の先端点の軌跡を色分けする色表示と、加速度を加速度ベクトルとして工具の先端点の軌跡上に表示するベクトル表示と、隣接する加速度ベクトルの終点を互いに接続する結線を表示する結線表示とのうちの少なくとも一つを行う。
(もっと読む)
ロボットとその制御方法
【課題】ロボットが複数の動作を実行する場合に、そのうちの特定の動作に制限されずに、各動作における条件の変化を考慮して、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができるロボットとその制御方法を提供する。
【解決手段】複数の動作を実行するロボット10の制御方法であって、エンドエフェクタ12に作用する外力を検出する力センサ14と、3次元空間内でエンドエフェクタの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置20とを備え、(A)外力の閾値をロボットの動作毎に記憶し、(B)ロボットアームを制御して各動作を順次実行し、(C)各動作の実行中に力センサで検出された外力が、前記閾値を超えた場合に、ロボットアームを停止する。
(もっと読む)
学習制御機能を備えたロボット
【課題】従来、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部(1)と、ロボット機構部の動作を制御する制御装置(2)とを含み、制御装置(2)は、ロボット機構部の動作を制御する通常制御部(4)と、作業プログラムに指定された教示速度に、速度変化比を乗算した速度指令にてロボット機構部(1)を動作させたときに、センサにより検出された結果から、ロボット機構部の制御対象の軌跡又は位置を目標軌跡又は目標位置に近づけるため、もしくは制御対象の振動を抑制するための学習補正量を算出する学習を行う学習制御部(3)と、を有し、ロボット機構部の制御対象位置が速度変化比に依らず一定の軌跡を移動するように処理を行うことを特徴とする。
(もっと読む)
回転速度表示装置
【課題】加工条件を変更した場合における加工能率の変化を作業者が容易に把握することができ、びびり振動を抑制する際における作業者の負担を軽減することができる回転速度表示装置を提供する。
【解決手段】びびり振動の発生を検出すると、安定回転速度を算出するとともに、加工プログラムをもとに、現在の回転速度で加工した際の想定加工時間と、安定回転速度で加工した際の想定加工時間とを夫々算出し、さらに回転軸3の回転速度を安定回転速度へと変更した場合に、加工能率がどのように変化するかを演算し、安定回転速度とともにモニタ15に表示するようにした。したがって、作業者は、モニタ15の表示にもとづいて回転速度の変更に伴う加工能率の変化を容易に把握することができ、ひいては加工能率の向上を図ることができる。
(もっと読む)
数値制御装置
【課題】加工プログラムに射影工具軸ベクトルの向きが急変するような移送対象物の動きを指示する部分が含まれている場合でも、工具とテーブルとの相対的な急回転を防いでワークの加工精度の低下及び機械ショックの発生を抑制する。
【解決手段】数値制御装置2は、姿勢調整箇所の前後に亘る姿勢調整区間において工具106の姿勢を調整するための姿勢調整情報を求める姿勢調整情報導出部16と、媒介変数時間関数を求める媒介変数時間関数導出部18と、媒介変数時間関数から求めた各時点に対応する媒介変数のうち姿勢調整区間内の媒介変数については、先端パス上の先端点の位置座標と、その先端点から当該先端点に対する位置関係を姿勢調整情報に基づいて射影工具軸ベクトルの向きの変化が緩やかになる方向に調整した上空パス上の上空点へ向かう工具軸ベクトルを求めてその位置座標及び工具軸ベクトルから指令パルスを求める移送指令導出部20とを備える。
(もっと読む)
工作機械
【課題】びびり振動を抑制可能で且つ目標とする加工面粗さを得ることもできるような変動パラメータを作業者が容易に把握可能な工作機械を提供する。
【解決手段】びびり振動を抑制するために主軸1の回転速度を変動させるにあたって、びびり振動の抑制に効果的な変動パラメータに係る情報を表示するとともに、回転速度を変動させることで加工面に生じるうねりを考慮して、該うねりを含んだ理論粗さを算出し、該理論粗さを変動パラメータに関連づけた状態で表示手段15に表示するようにした。そのため、作業者は、理論粗さを考慮に入れた上で振動抑制効果の高い変動パラメータの値を容易に把握することができる。したがって、びびり振動を抑制することはできたものの、加工面粗さが目標よりも下回ってしまったというような事態の発生を防止することができる。
(もっと読む)
音変換装置を備えた工作機械の数値制御装置
【課題】音変換手段を利用して、作業者が遠隔からでも工作機械等の機械音を確認でき、パラメータ調整の効果等を直感的に認識できるようにした数値制御装置の提供。
【解決手段】数値制御装置12は、駆動軸14を制御する駆動軸制御部16と、駆動軸14の位置及び電流等の物理量を時系列データとして取得し記憶する駆動軸データ記憶部18と、該時系列データを予め定めた表示形式に変換し、少なくとも1つの表示波形として表示する表示部20と、表示された表示波形を、作業者30が入力操作により選択することを可能にする選択部22と、選択された表示波形を音として出力可能な形式の音変換データに変換する音変換部24と、生成された音変換データを音として出力する音出力部26とを備える。
(もっと読む)
ユーザインタフェースが変更可能な数値制御装置
【課題】ユーザインタフェースが変更可能な数値制御装置を提供する。
【解決手段】保守作業を行うにあたり、画面切換情報記憶した外部記憶媒体9を装着する。数値制御装置100は、工作機械120の非常停止信号121、または、安全状態信号122の信号入力11を確認し、非常停止信号121、あるいは、安全状態信号122の入力が無い状態で強制ボタンの押下の何れか1つによって、数値制御装置100は非常停止状態にされ(符号8参照)、工作機械120からの安全状態信号122の入力が有れば、数値制御装置100は非常停止状態にされず、ユーザインタフェース表示に用いられる画面テーブルが通常作業用画面テーブル6から保守作業用画面テーブル7に切り換わり(図5の切換12)、表示装置13に表示されるユーザインタフェース表示が、通常作業用インタフェース表示14から保守作業用ユーザインタフェース表示15に切り換わる。
(もっと読む)
ロボット、及びロボットの制御方法
【課題】最大定格出力に近い駆動条件であっても、本来の駆動性能を発揮することが可能なロボットを提供すること。
【解決手段】多軸ロボットは、第1の駆動電圧を供給する第1電源回路1と、第1の駆動電圧よりも高い電圧である第2の駆動電圧を供給する第2電源回路2と、第1電源回路1と第2電源回路2とを切り替えるスイッチ21〜26とを備えている。そして、モーター部11〜16の駆動条件を規定する制御信号が所定の閾値以上になった場合に、スイッチ21〜26を駆動して第1電源回路1から高電圧の第2電源回路2に切り替えることにより、十分な駆動電圧が確保されるため、期待通りの動作を行うことができる。換言すれば、制御信号から駆動電力が不足しそうな状況を予測して、第2電源回路2に切り替えることにより、決められた作業時間(タクトタイム)で、作業に必要な動作を行うことができる。
(もっと読む)
1 - 20 / 201
[ Back to top ]