
Fターム[3C269GG06]の内容
数値制御 (19,287) | 位置制御系の種類、構成 (490) | 位置、速度、加速度以外の変量の利用 (61)
Fターム[3C269GG06]に分類される特許
1 - 20 / 61
位置制御装置
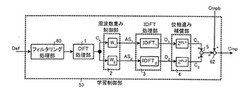
【課題】繰返し学習制御部を持つ位置制御装置において、位置偏差に多様な高調波成分が含まれる場合にも、繰返し学習制御によって、位置偏差の高い減衰性と、迅速な収束性を達成する繰返し学習制御機能を持つ位置制御装置を提供する。
【解決手段】位置偏差を離散フーリエ変換して得られたフーリエ係数ベクトルに、複数の周波数重み係数を乗じることで、周波数帯域別に成分分割し、成分毎に離散フーリエ逆変換した信号データに、最適な位相進み補償を与え加算することで、学習時の補正値データを構成する。
(もっと読む)
マスタ軸とスレーブ軸との同期制御を行うモータ制御装置

【課題】マスタ軸を駆動するマスタ軸モータとスレーブ軸を駆動するスレーブ軸モータとを正確に同期制御することができる、小型で低価格のモータ制御装置を実現する。
【解決手段】マスタ軸を駆動するマスタ軸モータ14とスレーブ軸を駆動するスレーブ軸モータ54とを同期制御するモータ制御装置1は、マスタ軸の位置データと所定一定周期の基準信号とを出力するマスタ軸位置検出器11と、マスタ軸位置検出器11が出力した位置データと基準信号とを受信するマスタ軸受信回路13と、マスタ軸受信回路13が受信した位置データと基準信号を受信した時点の位置データとの差分を、マスタ軸差分として算出するマスタ軸演算回路13と、マスタ軸差分をマスタ軸モータ14の動作と同期を取るための信号として用いてスレーブ軸モータ54の動作を制御するスレーブ軸モータ制御部55と、を備える。
(もっと読む)
位置決め制御装置、これを備えた工作機械
【課題】送り装置の加速性能を損なうことなく、位置決め精度を高めることができ、従来に増して高精度な位置決めを行うことができる位置決め制御装置、工作機械を提供する。
【解決手段】移動体と、移動体を送り軸方向に案内する案内機構部及び移動体を移動させる駆動機構部を有する送り装置と、送り装置を支持する構造体2と、駆動機構部の作動を制御して、工作機械上の基準位置に対する移動体の移動位置を制御する制御装置20とを備え、更に、前記構造体の変位に起因した前記基準位置に対する前記送り装置の前記送り軸方向における変位を導出する導出部11,28と、導出部11,28により測定された変位データを受信して、この変位を打ち消すための修正データを、制御装置20における制御信号に加算する加算部27とを備える。
(もっと読む)
位置制御装置
【課題】フルクローズド位置制御に於いて、送り軸機構部の剛性が低下した場合でも、低周波の振動が発生することなく、安定に動作させる位置制御装置を提供する。
【解決手段】被駆動体の位置検出値Plとモータの位置検出値Pmの差分を入力とした1次遅れ回路17の出力と、モータの位置検出値Pmを加算した位置検出値を位置フィードバック値として使用する位置制御装置において、経年変化補正器30が被駆動体の振動を検出した場合に、前記1次遅れ回路17の時定数Tpが大きくなるように可変することで低周波振動の発生を抑制する。
(もっと読む)
ロボット制御装置
【課題】多関節ロボット本体の制御において、軌道計算が複雑で計算の所要時間が不定であっても、複雑な軌道計算と、同期動作とを並行して実行する必要がある。
【解決手段】ロボット制御装置200は、共有メモリ203と、共有メモリ203にアクセス可能に接続された第1の処理部201及び第2の処理部202と、を備えている。第1の処理部201は、多関節ロボット本体を目標位置姿勢に動作させるコマンドから各アーム用モータに出力する指令値の連なりを示す動作指令データBを計算し、計算結果である動作指令データBを共有メモリ203に格納する軌道計算処理を行う。第2の処理部202は、共有メモリ203に格納された動作指令データBを取得して、指令値を各アーム用モータに一定の時間間隔で同期して出力する同期処理を行う。
(もっと読む)
象限突起補正方法
【課題】象限突起を補正する高精度な補正指令を簡易かつ短時間で算出する。
【解決手段】数値制御工作機械10の送り軸の移動方向反転時に生ずる象限突起を補正する象限突起補正方法において、数値制御工作機械のサーボモータで駆動される送り軸の所定区間を繰り返し駆動して位置偏差を求め、該位置偏差に基づいて学習制御を行うことにより、サーボモータに入力される指令に付加されるべき、象限突起を補正する補正指令を作成し、補正指令は立ち上がり部分と立ち下がり部分とを少なくとも含んでおり、立ち上がり部分は、単一の直線Cv1または単一のアークタンジェント曲線Cv4で近似されると共に、立ち下がり部分は、少なくとも一つの指数関数曲線Cv3で近似される。
(もっと読む)
送り軸反転時の補正方法
【課題】象限突起を高精度で補正することのできる象限突起補正方法を提供する。
【解決手段】数値制御工作機械10の送り軸反転時に生ずる象限突起を補正する象限突起補正方法は、数値制御工作機械のNCプログラムから、サーボモータに指令されるべき位置指令を現在の位置指令から所定時間後の位置指令まで所定の制御周期毎に記憶部に記憶し、記憶された位置指令に基づいて反転補正指令を算出し、サーボモータの動作により得られる情報に基づいて、反転補正指令をサーボモータの速度指令またはトルク指令に付加する時刻を、サーボモータの反転時刻から繰上げる繰上時間を算出し、サーボモータの反転時刻よりも繰上時間だけ繰上げた時刻に反転補正指令をサーボモータの速度指令またはトルク指令に付加して象限突起を補正する。
(もっと読む)
負荷イナーシャ推定方法及び制御パラメータ調整方法
【課題】負荷イナーシャ推定方法及び制御パラメータ調整方法を提供する。
【解決手段】負荷位置制御システムにおいて、フィードバック制御系21による負荷位置制御試験を実施して、特定の負荷位置θLで生じる第1の位置偏差Δθを測定し、負荷位置制御システムのモデルである負荷イナーシャ推定モデル60において、フィードバック制御系モデルによる送り系モデルの負荷位置制御シミュレーションを実施し、このときに前記特定の負荷位置で生じる第2の位置偏差Δθが、前記第1の位置偏差に等しくなるまで、送り系モデルに含まれている負荷イナーシャJLを調整して前記負荷位置制御シミュレーションを繰り返し、その結果、前記第2の位置偏差が、前記第1の位置偏差に等しくなれば、このときの送り系モデルの負荷イナーシャが実機の送り系の負荷イナーシャであると推定する。また、この推定した負荷イナーシャで逆特性モデル50の係数a3〜a5を設定する。
(もっと読む)
加工ロボットとその加工制御方法
【課題】 工具をワークに押付けながら加工する場合において、工具の切れ味が変化してもワークの加工寸法への影響が小さく、かつ工具の交換頻度を下げることができる加工ロボットとその加工制御方法を提供する。
【解決手段】 外力を計測する力センサ15と、工具12と、工具を3次元空間内で移動可能なロボットアーム16と、加工データを記憶しロボットアームを制御するロボット制御装置20とを備える。ワークの加工開始時(B)に、工具12の送りを停止して、所定の押付け力及び工具の動作速度で工具12をワーク1に押付け、工具12がワーク1に所定の深さまで切り込むまでの加工速度を計測する。次いで、ワークの加工時(C)に、前記加工速度から工具の送り速度、押付け力、又は工具の動作速度を補正してワーク1を加工する。また、工具が劣化し、加工速度が予め設定した限界加工速度に達したら、加工後に工具を交換する。
(もっと読む)
ロボットの制御装置及び方法
【課題】ロボットの柔軟制御中にロボットに対して急激に大きな外力が働いた場合に、ロボット各軸の位置の急激な変化に適切に対応し得る可動域制限を行うことができる制御装置及び制御方法を提供する。
【解決手段】本制御装置及び制御方法は、少なくとも1つの関節を有するロボットにおいて、各関節につき、関節位置指令に対して、位置フィードバック制御及び速度フィードバック制御を行い、該関節に設定された関節座標系において、所定の制限開始位置と該関節の現在位置との関係及び所定の制限開始速度と該関節の現在速度との関係に基づいて制限トルクを計算し、計算された制限トルクを速度フィードバック制御の出力に加算して得られるトルクにより該関節の動作を制御する。
(もっと読む)
ロボット装置及びロボット装置の制御方法
【課題】教示動作のための専用のキャリブレーションツールが不要であり、また、マニピュレータの手先にキャリブレーションツールを取り付けることが不要であって、教示動作のたびに微小な位置及び姿勢のずれが生ずることがなく、かつ、迅速な教示動作が可能となされたロボット装置及びロボット装置の制御方法を提供する。
【解決手段】マニピュレータ1と、このマニピュレータ1の動作を制御する制御手段とを備え、制御手段は、閉じたときに錘形状となる把持ツメを手先に有するマニピュレータ1の手先を作業台上に設けられた位置基準部7に当接させることによって、位置合わせのための教示動作を行う。
(もっと読む)
高速高精度な接触作業に適用するロボット制御システム、ロボット制御方法、ロボット制御装置、およびプログラム
【課題】 高速高精度な接触作業に適用するロボット制御システム、ロボット制御方法、ロボット制御装置、およびプログラムを提供すること。
【解決手段】制御装置600は、ロボットのワークの位置、姿勢、力制御値、およびモーメント制御値についての目標値を取得して格納する目標値格納部626と、目標位置および目標姿勢を読出し、切換え行列を適用して力を反映させ、さらに滑り摩擦や慣性力などの外力の除去を含む位置姿勢制御部628とを含み、自由空間と、拘束空間との間の制御力・運動の非干渉化を含む位置姿勢制御部628および力・モーメント制御部630とによって制御出力統合部634からロボットの関節に対する制御信号を生成させている。これらによって,高速高精度なロボットアームの点接触、線接触、面接触のすべての接触作業に適用する位置、姿勢、力及びモーメントの制御技術を提供する。
(もっと読む)
加工力監視システム及びをそれを用いた工作機械
【課題】 外部センサを用いず、システムのロバスト性を確保すると共に、加工力を高精度に検出する加工力監視システム及びをそれを用いた工作機械を提供する。
【解決手段】 ワークを支持するワーク支持手段と、前記ワーク支持手段を動かす駆動手段と、前記ワークを加工する加工手段と、前記駆動手段に入力する参照信号と前記駆動手段から出力する出力信号とに基づき、前記駆動手段への外乱を推定し、前記参照信号にフィードバックする外乱オブザーバと、前記駆動手段に入力する参照信号と前記駆動手段から出力する出力信号とに基づき推定した前記駆動手段への外乱から、予め求めた摩擦力を減算することにより前記加工手段の加工力を推定する加工力推定オブザーバと、を備えたことを特徴とする。
(もっと読む)
ロボット制御装置
【課題】摩擦補償を適切に行うことでロボットの実際の動作軌跡をより理論に近づける。
【解決手段】ロボット制御装置3は、モータ軸側ギアと出力軸側ギアとが停止しており且つ弾性変形量がゼロである状態から出力軸を目標駆動方向に駆動させる場合に、モータ軸側ギアに印加する目標駆動方向への摩擦補償用トルクを徐々に増加させ、弾性変形量が最大弾性変形量に到達した以後では弾性変形量が最大弾性変形量に到達した時点での摩擦補償用トルクを一定値として印加する。
(もっと読む)
位置決め装置
【課題】 精密又は微小な部品を位置決めしながら組立作業を行うロボットの接触力や位置・姿勢を、組立作業に応じて調整することができる多軸の位置決め装置を提供する。
【解決手段】 位置決め装置4は、駆動軸44を駆動するリニアアクチュエータ42と、リンク機構43とが駆動軸44によって連結され、リニアアクチュエータ42が駆動軸を駆動することでリンク機構43が駆動されて部品の位置決めを行う。コントローラ41は、変位センサ45及び位置座標変換演算部414が求めたハンドの位置、速度、及び加速度から装置のインピーダンスを算出し、算出した装置のインピーダンスからリニアアクチュエータ42の駆動力を算出する。
(もっと読む)
ロボット、電流制限装置及び電流制限方法
【課題】増速動作時において可動体に作用する外力から伝達機構を保護しつつ、モータにより可動体を増速する際に可動体に作用させ得る最大トルクが低下しない電流制限装置を提供する。
【解決手段】第1軸モータ21は、第1の減速機27を介して第1軸部4に接続され、正負の電流を夫々流すと電流に応じた正方向及び逆方向のトルクを第1軸部に与える。第1軸モータ21に流す電流は、位置/速度制御部40によって第1軸部の速度が速度指令値になるよう制御されている。更に、第1軸モータ21に流す電流は、第1軸用電流制限部41によって電流制限範囲内に制限される。電流制限範囲は、第1軸用電流制限部41によって上限値及び下限値が可変し、第1軸部が正方向に回動する際、下限値の絶対値を上限値の絶対値より小さくなるように下限値及び上限値を設定する。
(もっと読む)
工作機械
【課題】より高精度な工作物の加工を実現することができる工作機械を提供する。
【解決手段】工具40を支持し、且つ、工作物Wに対して所定軸方向に相対移動可能に設けられた工具支持体21と、工作物Wに対して工具支持体21を所定軸方向へ相対移動させるサーボモータ32と、工作物Wに対する工具支持体21の所定軸方向への相対位置またはサーボモータ32の回転角を検出する位置検出器34、35と、工作物Wの加工部位形状を測定し、測定結果と目標形状との偏差を算出する形状測定センサ50と、位置検出器34、35により検出された情報に基づいてサーボモータ32を駆動する第一のフィードバック制御から、形状測定センサ50により算出された偏差に基づいてサーボモータ32を駆動する第二のフィードバック制御へ、切り替えて実行するサーボドライブ33を備える。
(もっと読む)
ロボット制御装置およびロボットシステム
【課題】負荷重量、モータ回転方向に因らず、減速機角度伝達誤差を補正できるロボット制御装置を提供すること。
【解決手段】負荷重量により補正信号の振幅を変更する振幅変更部22と、モータ11の角速度の常時監視により、モータ11の軸反転時に補正信号の位相を変更する位相変更部23を設ける。また、モータ11の回転方向軸反転後に補正量を保持する出力部25を設け、位置指令を大きく変動させることなく、補正を行う。補正パラメータの一部は教示装置から設定される。
(もっと読む)
ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、及びロボットアーム制御用集積電子回路
【課題】ロボットアームが動作する環境に適応し、さらに、作業者が簡単で短時間にロボットの教示を行うことが可能なロボット制御を実現できる、ロボットアームの制御装置及び方法、ロボット、ロボットアームの制御プログラム、及びロボットアーム制御用集積電子回路を提供する。
【解決手段】ロボットアーム(5)の制御装置(70)であって、ロボットアームの動作に関する情報が記憶された動作情報データベース(17)と、人(4)の力を検出する力検出部(53)と、人の力に応じて、動作情報データベースの動作情報を補正する動作補正部(20)を備えている。
(もっと読む)
ロボットアームの制御方法
【課題】 ティーチングプレイバック制御による動作中にフィードバック制御に切り替えた時に、ロボットのアームの振動が抑制されるロボットアームの制御方法を提供する。
【解決手段】 制御部のコントロール部に格納されたプログラムの指示でティーチングプレイバック制御を実行して予め決まった経路に沿ってロボットアームを動かすステップと、アームに設けたワーク認識手段によってワークの有無を認識するステップと、ワークを認識すると同時に前記コントロール部のプログラムをティーチングプレイバック制御から非接触型インピーダンス制御法によるフィードバック制御に切り替え、ワークに追従してロボットアームを動かすステップとからなる制御方法でロボットアームを動作させる。非接触型インピーダンス制御法を用いたことにより、制御切り替え時のロボットアームの振動が抑制される。
(もっと読む)
1 - 20 / 61
[ Back to top ]