
Fターム[3C269MN40]の内容
数値制御 (19,287) | 安全、監視、試験、診断、異常検出 (2,108) | 検出の方法 (1,318) | シミュレータ、モデルの利用 (228)
Fターム[3C269MN40]の下位に属するFターム
プログラム実行のため (93)
プログラム作成のため (74)
Fターム[3C269MN40]に分類される特許
1 - 20 / 61
工作物の機械加工のシミュレーション
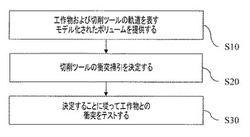
【課題】切削部および非切削部を有する切削ツールによる工作物の機械加工をシミュレートするための、コンピュータ実施方法を提供する。
【解決手段】工作物および切削ツールの軌道を表すモデル化されたボリュームを提供するステップ(S10)と、切削ツールの衝突掃引を決定するステップ(S20)であって、衝突掃引は、切削ツールが軌道をたどる場合に、切削ツールの非切削前部によって掃引されるボリュームを表す、ステップ(S20)と、決定するステップ(S20)に従って工作物との衝突をテストするステップ(S30)と、を含む方法により、切削ツールによる工作物の機械加工のシミュレーションを向上させる。
(もっと読む)
工作機械における工作物の機械加工シーケンスシミュレーション装置

【課題】本発明は、工作機械の動作シーケンスのシミュレーションを可能にしさらにシミュレーションを改善した工作機械において、シーケンスのシミュレーション装置の提供を目的とする。
【解決手段】本発明は、工作機械における工作物を機械加工するためのシーケンスをシミュレーションするための装置に関し、全体的なシミュレーションアプローチを特徴とする。PLC制御手段723とPLCシーケンスシミュレーション手段725は、工作機械のPLC動作シーケンスをシミュレーションを支援し、これにより、全ての実質的な態様において、工作機械のリアルなシミュレーションを可能にする。その結果、特に訓練や機械稼働時間の判定中において、非常に有益である。
(もっと読む)
音変換装置を備えた工作機械の数値制御装置
【課題】音変換手段を利用して、作業者が遠隔からでも工作機械等の機械音を確認でき、パラメータ調整の効果等を直感的に認識できるようにした数値制御装置の提供。
【解決手段】数値制御装置12は、駆動軸14を制御する駆動軸制御部16と、駆動軸14の位置及び電流等の物理量を時系列データとして取得し記憶する駆動軸データ記憶部18と、該時系列データを予め定めた表示形式に変換し、少なくとも1つの表示波形として表示する表示部20と、表示された表示波形を、作業者30が入力操作により選択することを可能にする選択部22と、選択された表示波形を音として出力可能な形式の音変換データに変換する音変換部24と、生成された音変換データを音として出力する音出力部26とを備える。
(もっと読む)
加工条件探索装置
【課題】少ない実験数で最良の加工条件を探索することができるとともに、加工結果の良否評価に誤りがある場合でも、その誤りの影響を解消して、適正な加工条件を生成することができるようにする。
【解決手段】加工特性モデル生成部25により生成された新たな加工特性モデルを用いて、次の実験加工条件を生成する実験加工条件計算部21や、加工結果収集部12により蓄積された実験加工データ毎に、当該実験加工データ内の加工結果に含まれている加工良否評価を1つずつ変更する加工結果評価一部変更部27などを設ける。
(もっと読む)
ロボットコントローラー、簡易設置型ロボット、及び簡易設置型ロボットの制御方法
【課題】移動装置に搭載されたロボットの動作速度を該ロボットの設置された状況に応じて変更することの可能なロボットコントローラー、該ロボットコントローラーとロボットとが移動装置に搭載された簡易設置型ロボット、及び簡易設置型ロボットの制御方法を提供する。
【解決手段】ロボット20は、ロボット20の振動を検出する角速度センサー38を備えている。制御装置21は、ロボット20に試行動作を実行させ、試行動作中における角速度センサー38の計測結果を振動情報として取得するとともに、その取得した振動情報をデータベース53に記憶されているメーカー評価情報71に基づいて解析する。メーカー評価情報71には、振動情報と該振動情報が計測されるロボット20の設置状況に適した動作速度とが関連付けられている。そして、振動情報の解析結果に基づいて選択された動作速度でロボット20を動作させる。
(もっと読む)
NCプログラム生成方法および切削加工方法
【課題】3次元形状切削において、加工実施前に工具摩耗を高精度に予測し、工具交換等を考慮したNCプログラムを生成することができるNCプログラム生成方法を提供する。
【解決手段】NCプログラム生成方法において、NCシミュレータ5により、NCプログラムを予め設定された処理間隔ごとのNCシミュレーションを実行し、加工条件取得部6および加工状態取得部7により、加工条件および加工状態を取得し、工具摩耗量算出部8により、工具摩耗データベース10から加工状態に応じた工具摩耗量を参照し、処理間隔ごとの工具摩耗量に関する情報を算出し、NCプログラム最適化処理部9により、工具摩耗量算出部8で算出された処理間隔ごとの工具摩耗量に関する情報に基づいて、工具を無駄なく利用できるように、NCプログラムの加工条件を変更し、NCプログラムを最適化する。
(もっと読む)
ロボット作業シーケンスの自動化プログラミングおよび最適化方法
【課題】ロボット教示において、目的指向的なプログラミング手法を提供すること。
【解決手段】制御部によって動作および作業シーケンスを実行し、少なくとも1つのセンサによって作業経過を記録し、プラニングツールが記録された作業経過を所期機械加工目的と比較して、機械加工目的と記録された作業経過に対応する機械加工の実際値との差から、所期処理目的が達成される動作および作業シーケンスを決定し、その後、決定された動作および作業シーケンスは、リアルタイムで、または段階的に、ロボットが実行可能な制御命令に変換され、所期機械加工目的を達成するように機械加工ロボットが操作される方法。
(もっと読む)
ロボットシミュレーション装置、ロボットシミュレーション方法、及びロボットシミュレーションプログラム
【課題】シミュレーションを行うハードウェア資源によってシミュレーションの結果が互いに異なることを抑えてハードウェア資源間でのシミュレーションの結果の差異を少なくすることの可能なロボットシミュレーション装置、ロボットシミュレーション方法、及びロボットシミュレーションプログラムを提供する。
【解決手段】仮想ロボットを軌道に沿って動かすロボットシミュレーション装置であって、前記仮想ロボットの軌道をサンプリング時間Tpだけサンプリングするプロセスである軌道計算プロセスP1を割り込み間隔Tiで行う軌道計算部と、前記サンプリング時間Tpが前記割り込み間隔Ti以下となる範囲で前記サンプリング時間Tpと前記割り込み間隔Tiとの双方を各別に可変にする時間可変部とを備える。
(もっと読む)
ロボット教示データの算出方法およびロボットのコントローラ
【課題】第1のロボットの動作を第2のロボットに実行させる。
【解決手段】第1のロボットRAの動作を第2のロボットRBが実行できるように、第1のロボットRAに対する第1の教示データθAから第2のロボットRBに対する第2の教示データθBを算出するロボット教示データの算出方法であって、第1の教示データθAに対する第1のロボットRAの基準点SAの位置PAを、第1の教示データθAと第1のロボットRAの構成内容を示す第1のロボット構成データとに基づいて算出し、前記算出した位置PAに第2のロボットRBの基準点SBが位置するための第2の教示データθBを、前記算出した位置PAと第2のロボットの構成内容を示す第2のロボット構成データとに基づいて算出する。
(もっと読む)
加工面評価装置、加工面評価方法及びプログラム
【課題】短時間に加工面の評価を行うことができる加工面評価装置等を提供する。
【解決手段】制御部3は、入力部13から面法線ベクトル21を含む加工形状データ27を入力し(S11)、工具の形状や加工パラメータを設定する(S12)。次に、画像演算部5は、カスプデータ26を算出し、算出結果をカスプデータベース20に記憶する(S13)。次に、制御部3は、加工形状データ27、工具の形状や加工パラメータに基づいて、カスプデータベース20を検索してカスプデータ26を取得する(S14)。次に、画像演算部5は、カスプデータ26をテクスチャデータに変換し(S15)、テクスチャデータを加工形状データ27の加工面にマッピングして、全面カスプを生成し(S16)、全面カスプ画像を表示部7に表示する(S17)。
(もっと読む)
工作機械の制御装置及びこれを備えた加工関連データ処理システム
【課題】工作機械の制御装置にかかる負荷を軽減することができる加工関連データ処理システムなどを提供する。
【解決手段】加工関連データ処理システム1は、工作機械2の制御装置3とデータ処理装置40とが電気通信回線5を介して接続されており、制御装置3は、NC装置11と支援装置20とから構成される。支援装置20は、データ処理装置40に連係処理信号を送信してデータ処理装置40を遠隔操作し、データ処理を行わせるとともに、データ処理装置40で行われたデータ処理結果を受信する連携処理指示部22を備え、データ処理装置40は、プログラム自動生成部44と、加工シミュレーション部45と、制御装置3から連係処理信号を受信して、制御装置3で受け付けられたデータ処理要求に対応し且つワークの加工に関連したデータ処理をプログラム自動生成部44及び加工シミュレーション部45に行わせるとともに、データ処理結果を制御装置3に送信する連係処理実行部42とを備える。
(もっと読む)
多関節ロボットアーム型搬送装置の軌道情報生成装置
【課題】始点から終点までの搬送対象物を直線移動させるにあたり、移動時間の短縮と振動の低減とを両立した軌道情報生成装置を提供する。
【解決手段】多関節ロボットで搬送対象物を直線移動させるにあたり、搬送装置103の動力学モデルに基づいて始点Sから終点Eまでの移動に要する時間teをパラメータの一つとして含む評価関数の値が最小となるように最適化手法を用いて軌道情報132を生成する。動力学モデルとして搬送対象物Wを搬送する先端リンクの動作を直線動作に限定したモデルを予め設定しておき、予め設定された搬送装置の振動特性を用いて先端リンクの移動により生じる模擬振動の大きさ(x−xa)を算出し、算出した模擬振動の大きさ(x−xa)をパラメータの一つとして評価関数に含め、少なくとも上記2つのパラメータである移動時間te及び模擬振動の大きさ(x−xa)を含む評価関数の値が最小となるように軌道情報132を生成する。
(もっと読む)
プログラム作成支援システム、及び、そのコンピュータプログラム
【課題】複数の駆動手段によって駆動されるロボット装置用の駆動プログラムの作成を容易にすることができるプログラム作成支援システムを提供する。
【解決手段】プログラム作成支援システム1は、各サーボ5の接続構成を設定するための設定画面SGを表示する表示装置4と、所定の情報を記憶する制御ユニット3と、を備えている。そして、プログラム作成支援システム1は、仮想3次元空間に配置するための各サーボ5にそれぞれ対応するオブジェクトSOを生成し、設定画面SGにて設定された接続構成となるように各オブジェクトSOを配置した仮想3次元空間に基づいて2次元画像を生成し、当該2次元画像を前記設定画面SG上に表示させるものである。更に、設定画面SGに含まれる動作設定領域DSにて接続構成が設定された各サーボ5のそれぞれの動作に対応する駆動信号を生成し、各サーボ5に出力するものである。
(もっと読む)
数値制御装置
【課題】工作機械における駆動関連要素の電力損失または電力効率を算出し表示、印刷出力、記憶媒体への記録出力、または、数値制御装置内部または外部の機器への出力を実施することが可能な数値制御装置を得ること。
【解決手段】モータなどのアクチュエータを駆動させるための電力供給に関係する工作機械6における各駆動関連要素、および工作機械6に電力を供給する電源装置12のうちの少なくとも2つ装置の出力電力または出力エネルギーを計算または推定する電力算出部3と、前記電力算出部3から出力された出力電力または出力エネルギーから電力損失または電力効率を算出する損失/効率算出部4と、前記損失/効率算出部4にて算出された電力損失または電力効率を表示、印刷出力、記憶媒体への記録出力、または他の機器への出力を実施する電力出力部5とを備える。
(もっと読む)
シミュレーション装置
【課題】被制御装置の模擬が実行可能になるまでに要する時間が短く、且つ、被制御装置を正確に模擬することができるシミュレーション装置を提供する。
【解決手段】シミュレーション装置20は、制御装置10の制御対象である被制御装置を模擬するものであって、被制御装置を構成する機器毎の特性を示す情報が格納された設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が予め設定された基準速度よりも速い機器を模擬するシミュレーションPLC21と、上記の設定ファイルの内容に基づいて、被制御装置を構成する機器のうち応答速度が基準速度よりも遅い機器を模擬するシミュレーションPC22とを備える。
(もっと読む)
無線伝送装置とそれを用いたロボットの振動抑制制御装置およびロボット制御装置
【課題】無線化した加速度センサをロボットに取り付ける場合、センサを用いた振動抑制の効果を向上できるとともにセンサ基板における消費電力が低減できるようにする。
【解決手段】センサ信号の主成分の振動パラメータ(周波数、振幅、位相)を得る信号解析装置と、該パラメータからセンサ信号の近似波形を生成する信号発生器81を備えて、該パラメータが変更された場合のみパラメータの無線伝送を行う。得られる近似波形から各軸モータの速度を求め、シミュレーションによりロボット動作に基づくモータ速度を得て、モータ速度の差をモータ速度の振動成分とする。モータ速度の振動成分をモータの位置−速度制御ループにフィードバックしてロボットアームに発生する振動を抑制する。
(もっと読む)
ロボットの姿勢判定方法
【課題】簡易な演算により、ロボットの姿勢を判定するロボットの姿勢判定方法を提供する。
【解決手段】ワークに想定される誤差Δpにともなうエンドエフェクタの位置の変化を位置変化量Δr、誤差Δpにともなうマニピュレータにおける各軸の変化量を姿勢変化量Δq、誤差Δpが存在しないときのマニピュレータの各軸の値をqiとし、このqiにおけるヤコビアンをJv(qi)とすると、姿勢変化量Δqを、Δqi=Jv(qi)-1Δrにより算出する。そして、誤差Δpが最大となるときのマニピュレータの各軸の変化量を変化量Δqimaxとし、関節の回転角度限界をqmaxとすると、qi+Δqimax≦qmaxを満たすマニピュレータの各軸の値qiを誤差Δpを有するワークに対し当該作業点iにおける作業が可能な姿勢であると判定する。
(もっと読む)
ロボット装置用の制御プログラムを試験するための試験装置
本発明は、実際のロボット装置用の、具体的には、複数のロボット制御部(2.1〜2.n)を有する塗装装置用の制御プログラムを試験する試験装置に関連する。それらはそれぞれ制御プログラムを含み、実際のロボット装置におけるロボット制御部(2.1〜2.n)と、制御ユニット(4)が制御プログラムを含み、実際のロボット装置における制御ユニット(4)に相当するロボット制御部(2.1〜2.n)を調節するための少なくとも1つの制御ユニット(4)とに相当し、ロボット制御部(2.1〜2.n)をお互いに接続する、および/または、制御ユニット(4)に接続する第一のデータバス(3)も有し、第一のデータバス(3)は実際のロボット装置におけるデータバスに相当する。試験装置が、第一のデータバス(3)に接続され、かつ、実際のロボット装置の周辺機器部品をシミュレーションするモデリングデバイス(9)をも有し、そのため制御プログラムは周辺機器部品なしで試験され得る。本発明はまた、好適な試験方法をも含む。 (もっと読む)
工作機械、工作機械の温度測定部の数及び配置の決定方法及びプログラム
【課題】工作機械において熱変位量の推定を、逆解析により求めた熱源の同定方法によって精度良く熱変位の補正が可能である熱変位補正方法を提供する。
【解決手段】複雑な構造の駆動系の熱変位誤差を補正と、熱変位量の推定をする方法にあたって、まず、構造体に設置されている温度センサのうち有用性の高いものを温度測定部として選択し、次に、被測定構造体の熱源領域の設定を行い、被測定構造体の温度上昇量を行い、次いで逆解析により熱源領域の熱流入量を測定し、熱流入量を変数とする熱変位の補正式の確立が行われる。続いて各熱源への熱流入量を考慮した熱変位量の推定を行い、熱流入量に基づく熱変位補正が可能になる。
(もっと読む)
位置決め制御装置および工作機械
【課題】位置決め制御装置においてスループットを低下させずにモータの発熱を抑える。
【解決手段】位置決め制御装置は、第1の被駆動部材を移動させる第1のモータ54と、第2の被駆動部材を移動させる第2のモータ64と、第1および第2のモータのそれぞれに対して2自由度制御を行い、第1の被駆動部材を第1の目標位置に移動させ、第2の被駆動部材を第2の目標位置に移動させる制御手段51,53,61,63とを有する。制御手段は、第1の被駆動部材を第1の目標位置に移動させるために第1のモータの動作に必要な第1の時間Txと、第2の被駆動部材を第2の目標位置に移動させるために第2のモータの動作に必要な第2の時間Tyとを求め、第1および第2の被駆動部材をそれぞれ第1および第2の目標位置に移動させる際に、第1および第2のモータを、第1および第2の時間のうち長い方の時間で同時に動作させる。
(もっと読む)
1 - 20 / 61
[ Back to top ]