
Fターム[3D034CE01]の内容
操向リンク系及び4WS (6,986) | 4WSの制御及び制御対象 (1,188) | 車輪の操舵制御 (828)
Fターム[3D034CE01]の下位に属するFターム
前輪の操舵制御 (208)
後輪の操舵制御 (525)
モード等の設定、選択、切替え (62)
Fターム[3D034CE01]に分類される特許
1 - 20 / 33
自動車
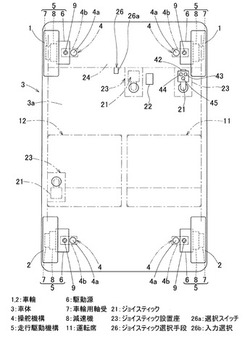
【課題】 その場回転や、横方向移動等が可能な自動車において、運転者による運転操作の操作性の向上を図る。
【解決手段】 3輪以上の車輪1,2を有し、全車輪1,2に独立して転舵可能な転舵機構4を有し、各車輪1,2のうちの駆動輪は、各々独立して原動機6を含む走行駆動機構5により走行駆動される自動車に適用する。走行駆動機構5は、例えばインホイールモータ駆動装置とする。転舵機構4の操作および走行駆動機構5の駆動の操作を行うジョイスティック21を有する。
(もっと読む)
走行駆動換向装置

【課題】走行駆動換向装置において、装置高さを低く抑える。
【解決手段】走行駆動換向装置1は、車両フレーム5に旋回可能に軸支された旋回軸6と、旋回軸6を任意の方向に旋回させる操舵ユニット7と、旋回軸6の下端部に設けられ、車輪11を回転駆動する走行モータ8cを含む走行ユニット8と、を備える。走行モータ8cから導出された電源ケーブル3は、旋回軸6の内部に挿入され、旋回軸6の中を横切って車両フレーム5上に水平方向に引き出されて、走行モータ8cの動作を制御するコントローラ9へ接続される。これにより、車両フレーム5上に引き出された電源ケーブル3による装置高さの増大を抑制することができる。
(もっと読む)
車輪ストラット
【課題】乗物に容易に取り付けることができ、乗物用のステアリング手段や車輪用の駆動装置のような他の手段を容易に結合することができる車輪ストラットを提供する。
【解決手段】車輪ストラットは、車輪ストラットを乗物に取り付ける乗物取付け手段108と、車輪ストラットに車輪を取り付ける車輪取付け手段105と、を備えている。車輪取付け手段は、乗物取付け手段108に対して、車輪ストラット100の長手方向軸の周りに回転可能である。車輪ストラット100は、車輪取付け手段を回転させる駆動手段103,101を備えている。
(もっと読む)
車両の制御装置
【課題】ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持する。
【解決手段】前輪(FL、FR)又は後輪(RL、RR)の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段(400)と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段(300、600)とを備えた車両(10)を制御する装置(100)は、平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備する。
(もっと読む)
後輪操舵装置
【課題】後輪の転がり抵抗を減らすことと、制御系の失陥時にも車両の操安性が確保されることを両立する後輪操舵装置を提供する。
【解決手段】左右タイロッド4a、4bを車両の左右方向に移動する操舵アクチュエータ10と、この操舵アクチュエータ10を車体に対して移動可能に支持するトー角可変支持手段20と、操舵アクチュエータ10を移動して左右後輪2a、2bのトー角を小さく調整するトー角調整アクチュエータ30とを備え、このコントローラ9の失陥時にトーイン付勢手段の付勢力によって操舵アクチュエータ10がトーイン位置に移動する構成とした
(もっと読む)
トレイラのためのステアリングのとれる単一のホイールユニット
【課題】トレイラのためのステアリングのとれる単一のホイールユニットを提供する。
【解決手段】サスペンション機構(15)と、このサスペンション機構(15)に取着されているホイール集合体とを支持しているホイールフレームと、前記ホイールフレームと、車両本体(11)との間に取着され、車両の向きを変えるように、前記車両(11)に対して前記ホイールフレームを回動するためのステアリング手段とを有する前記車両本体(11)に取着されるように適合されている単一のホイールユニットであって、前記ステアリング手段は、2つのステアリング構成要素(30)を有し、これらステアリング構成要素は、前記ホイールフレームの前部及び後部の各々に1つずつ回動可能に取着され(32、33)、前記車両本体(11)の側面に前記前部及び後部を独立に移動するように作動されることができる、単一のホイールユニット。
(もっと読む)
車輪位置変更装置
【課題】 路面段差通過時など大きな入力があった場合でもその衝撃を吸収しながら車両挙動をより安定にすることができる車輪位置変更装置を提供する。
【解決手段】 車輪位置変更装置は、車輪を懸架する複数の懸架手段と、各懸架手段に設けて車体に対する車輪の向きを変更する車輪向き変更手段と、各懸架手段に設けた車輪を駆動する駆動手段と、懸架手段を車体に対して目標位置に移動させる車輪位置変更手段と、を備え、車輪位置変更手段が、懸架手段を目標位置に向かわせる復元力を目標位置から第1の閾値分離れた範囲内では小さく、この範囲外では大きくなるように制御する。
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両旋回時に運転手に対して違和感を与えることなく、車両旋回時のアンダーステア状態の速やかな解消を補助できる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】車両の旋回時にアンダーステア状態にある場合には、前輪の車輪速度VWFを調整すべくアクセル操作を運転手が行うことを契機にグリップ力回復制御が実行される。すなわち、転舵輪である前輪は、その車輪速度VWFが運転手によって調整されつつ、その転舵角σの絶対値が一時的に小さくなるように調整される(第3タイミングt3)。その後、前輪の転舵角σは、最小転舵角σminから元の角度に向かう方向に再び調整される(第4タイミングt4)。
(もっと読む)
編成搬送台車設備
【課題】複数の台車により運搬物を運搬する編成搬送の途中で、ステアリング伝送手段にトラブルが発生しても、編成搬送を継続できる。
【解決手段】マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードと走行モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から求めた編成旋回中心から、各車輪装置の編成スレイブ軸目標舵角をそれぞれ演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、スレイブ台車(SC)に、ステアリング伝送手段(41A,42,43A)の故障時に、マスタ台車(MC)の操舵装置(M3)と同一角度で操作されるステアリング操舵角と、編成データ出力部(52)の編成データとにより、マスタ台車(MC)の編成旋回中心と同一位置となる従動編成旋回中心を求めて各車輪装置を操舵する操舵コントローラ(S20A)を設けた。
(もっと読む)
編成搬送台車設備
【課題】複数の独立換向式の車輪装置を有する複数の台車を使用して、大型の運搬物を運搬する。
【解決手段】複数台のうち1台をマスタ台車(MC)とし、残りをスレイブ台車(SC)とし、マスタ台車(MC)の操舵コントローラ(M20)に、編成運転モードを判断する単独・編成モード判断部(32M)と、ステアリングホイール(M3,S3)の操舵角から台車群の編成旋回中心を求め、この編成旋回中心から各車輪装置の編成スレイブ軸目標舵角を演算する編成運転制御部(20C)と、車輪装置に舵角指令を出力する舵角指令部(M20B)とを設け、スレイブ台車(SC)に車輪装置に舵角指令を出力する舵角指令部(M20B)を設け、マスタ台車(MC)からスレイブ台車(SC)の舵角指令部(M20B)に編成目標舵角を送信する伝送ケーブル(43A)を設けた。
(もっと読む)
転舵システムおよび燃料電池車両
【課題】車両が他の物体と衝突したときに衝突物の車両への侵入を抑制する。
【解決手段】各車輪12を独立して転舵させる転舵装置14と、車体11への衝突を検知する衝突センサ15と、衝突センサ15から衝突検知信号を受信した場合に、衝突検知信号に含まれる衝突位置情報と各車輪12の位置情報とに基づいて各車輪12をそれぞれ独立して転舵させる車両衝突時転舵制御を実行するECU17とを備える燃料電池車両10であって、ECU17は、車両衝突時転舵制御において、各車輪12の向きが衝突箇所を中心とする同心円の接線方向とそれぞれ合致するように各車輪12を転舵させる。
(もっと読む)
キャンバー角調整装置
【課題】高グリップ性と低燃費との両立を図ることができると共に、キャンバー角が制御不能となった場合に車両を安定した状態で制動することが可能なキャンバー角調整装置を提供する。
【解決手段】車輪2のキャンバー角を調整するキャンバー角調整装置4において、車輪2は、第1トレッド21と、その第1トレッド21に対して幅方向に並設され車両の外側又は内側に配置される第2トレッド22と、を備えると共に、第1トレッド21と第2トレッド22とが互いに異なる特性に構成され、第1トレッド21は、第2トレッド22に比して、グリップ力の高い特性に構成されると共に、第2トレッド22は、第1トレッド21に比して、転がり抵抗の小さい特性に構成され、車輪2のキャンバー軸Cを、車両1の前後方向軸Bに対して、傾斜させて配置したことを特徴とする。
(もっと読む)
車両制御装置
【課題】個々のコントローラの冗長度を必要以上に上げることなく、システム全体でエラーをバックアップすることにより、簡潔なECUの構成で、低コストで、高い信頼性とリアルタイム性と拡張性とを確保した車両制御装置を提供する。
【解決手段】車両の状態量、運転者の操作量を示すセンサ信号を取り込むセンサコントローラ2と、前記センサ信号に基づいて制御目標値を生成する指令コントローラと、制御目標値を受けて車両を制御するためのアクチュエータ5を作動させるアクチュエータコントローラ3と、がネットワークで接続される車両制御装置であって、前記アクチュエータコントローラ3は、前記指令コントローラが生成する制御目標値に異常が生じたときには、当該アクチュエータコントローラ3が受信したネットワーク上のセンサ値に基づいて制御目標値を生成する制御目標値生成手段を有し、前記制御目標値によってアクチュエータ5を制御する。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができると共に、キャンバー角が制御不能となった場合に車両を安定した状態で制動することが可能な車両制御装置を提供する。
【解決手段】第1トレッドと、その第1トレッドに対して幅方向に並設され車両1の外側又は内側に配置される第2トレッドと、を備え、第1トレッドは、第2トレッドに比して、グリップ力の高い特性に構成されると共に、第2トレッドは、第1トレッドに比して、転がり抵抗の小さい特性に構成された車輪2と、車輪2のキャンバー角を調整するキャンバー角調整装置4とを備えた車両用制御装置100において、少なくとも一つの車輪2のキャンバー角が制御不能であると判断した場合、制御可能な車輪2のキャンバー角を制御不能な車輪2のキャンバー角に近づけるように制御すると共に、ステアリング機構54を制御することを特徴とする。
(もっと読む)
ステアリング装置
【課題】 簡単な構成にて縦列駐車を容易にできるようにする。
【解決手段】 車両先頭部VFが駐車スペースPSに進入するときの距離a,b,c,dの変化に基づいて車両の進入パターンを判別し、判別された進入パターンに応じた算出式にて駐車スペースPSへの進入角度θを算出する。また、進入パターンに応じて設定される駐車可否判定条件を選択し、この判定条件に従って、車両を駐車スペースPSに縦列駐車できるか否かを判定する。縦列駐車が可能であると判定された場合には、車両先頭部VFの左前コーナーAを中心として車両を旋回させる。縦列駐車が不可能であると判定された場合には、運転者に対してやり直しのメッセージをアナウンスする。
(もっと読む)
回転可能な車両
【課題】その場で回転可能な車両の意に反する回転を防止する。
【解決手段】全車輪1a〜1dを別個に回転駆動する各モータ2a〜2dと、各車輪を別個に転舵する各アクチュエータ5a〜5dとを設けると共に、回転許可スイッチ7と回転方向操作レバー8とアクセルペダル9とからの回転させるための各信号の入力条件が揃った場合にのみその場での回転制御を行う。それら各条件を満たす操作を行う各操作子をそれぞれ分けて設けられており、いずれか1つまたは2つを誤って操作したとしても回転を実施しないため、不用意にその場で回転し始めてしまうことを防止することができる。
(もっと読む)
コンテナクレーンの走行制御装置
【課題】駆動輪に取り付けられた走行モータの回転数を個別に制御して、直進走行させる際の駆動輪間の速度差を小さくすることができ、コンテナクレーンを運転するオペレータの乗り心地を向上させることができるコンテナクレーンの走行制御装置を提供すること。
【解決手段】タイヤ式走行装置11eにより、コンテナヤードに並列にして設けられた複数の帯状のコンテナ設置スペースに沿って走行するコンテナクレーン3の走行制御装置13であって、前記コンテナヤードの設計段階における設計値、あるいは竣工時に実際に計測した計測値に基づいて作成されたコンテナ設置スペース毎の傾斜方向、傾斜量、および傾斜量に対応した前記タイヤ式走行装置11eの旋回角をデータベースとして備え、走行しようとするコンテナ設置スペースが変わる度に、前記タイヤ式走行装置11eの旋回角を設定し直すように構成されている。
(もっと読む)
車両用制御装置
【課題】回生エネルギーの回収効率の向上を図り、低燃費性能を得ることができる車両用制御装置を提供すること。
【解決手段】回生装置による回生を行う際には、車輪の転がり抵抗がより小さくなるように、かかる車輪のキャンバ角を調整する。これにより、車両走行時の運動エネルギーを電気エネルギーに変換する際には、その変換の際に発生する変換損失(車輪の変形ヒステリシスロス)を小さくして、変換損失の低減を図ることができるので、その分、回生エネルギーの回収効率の向上を図り、省燃費性能を得ることができる。
(もっと読む)
ステアリング装置
【課題】操舵軸および左右転舵軸間の交差伝動部と、左右転舵軸間の同回転・逆回転切り替え機構部とを1ユニット化したステアリング装置を提案する。
【解決手段】ステアリングホイールから延在する操舵軸の先端に入力傘歯車16を設け、これに噛合させて出力傘歯車17L,17Rを設け、左右輪から延在する左右転舵軸12L,12Rのうち、軸12Lに傘歯車17Lを固設し、軸12R上に傘歯車17Rを回転自在に支持する。軸12Rにシフタ24をスプライン嵌合し、該シフタ24の両側にそれぞれ、傘歯車17L,17Rと共に回転するクラッチ部材25L,25Rを配置する。シフト部材26を介してアクチュエータ27によりシフタ24を軸線方向へ変位させ、シフタ24をクラッチ部材25Lまたは25Rにクラッチ係合させることにより、左右転舵軸同回転駆動状態と左右転舵軸逆回転状態との間での切り替えを行うことができる。
(もっと読む)
車両用制御装置及び車両
【課題】その場旋回時における車輪の磨耗やエネルギーロスを低減させ得る車両用制御装置、及びその車両用制御装置により制御される車両を提供すること。
【解決手段】本発明の車両用制御装置及び車両によれば、その場旋回を実行する際に、各車輪に対し、トウ角が付与されると共に、キャンバ角が付与されるので、その場旋回時における各車輪の接地幅を付与前にくらべて狭くすることができるので、その場旋回時における車輪のすべりを抑制することができ、エネルギーロスの発生を低減させることができる。また、各車輪の接地幅が狭くなることにより、車輪の磨耗を低減させることができる。
(もっと読む)
1 - 20 / 33
[ Back to top ]