
Fターム[3D037FA10]の内容
補機駆動、推進制御及び安全装置 (4,671) | 推進制御装置・安全装置の入力信号 (984) | 運転者の状態によるもの (468) | 居眠りの検出によるもの (189) | 運転状態から推定するもの (61)
Fターム[3D037FA10]に分類される特許
1 - 20 / 61
車両の制御装置
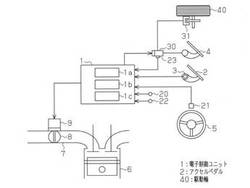
【課題】アクセルの誤操作を適切に判定することにより、駆動力低下によるドライバビリティの悪化を抑えることのできる車両の制御装置を提供する。
【解決手段】電子制御ユニット1は、駆動輪40の駆動力を低下させる駆動力低下制御を実行する。そして電子制御ユニット1は、車両進行方向における障害物の接近を検出してから所定の判定時間が経過した後にアクセルペダル2が操作されたときには、駆動力低下制御として駆動輪40の制動を行う。
(もっと読む)
車両の制御装置

【課題】予期しない駆動力の発生を防止する。
【解決手段】ECU200は、シフト操作を受け付けるシフト操作受付部201と、アクセル開度θを検出する開度検出部202と、車両が停止状態であるか否かを判定する停止判定部204と、シフト操作受付部201によってニュートラルポジションから走行ポジションへのシフト操作が受け付けられたときに、停止判定部204によってハイブリッド車両HVが停止状態であると判定され、且つ、開度検出部202によって検出されたアクセル開度θが、予め設定された開度閾値θ0以上である場合に、ニュートラルポジションを維持する位置制御実行部205と、を備える。
(もっと読む)
車両ドライバの特定装置及び車両ドライバの特定方法
【課題】車両ドライバの特定にかかる利便性が維持される運転操作の学習を通じての車両ドライバの特定をより高精度に行うことのできる車両ドライバの特定装置及び車両ドライバの特定方法を提供する。
【解決手段】車両100には、ドライバによる運転操作の特徴量を示すデータが当該運転操作の行われた地点の別に記録されるデータベース140が搭載されている。また、車両100に搭載される車載制御装置130には、特定対象とするドライバの該当する地点における運転操作の特徴量とデータベース140にデータとして記録された地点別の運転操作の特徴量との比較を通じてドライバを特定する処理を行うドライバ特定処理部133が設けられている。ドライバ特定処理部133は、ドライバの運転操作の特徴量と当該運転操作が行われた地点に基づいて車両100のドライバを特定する。
(もっと読む)
車両運行状態情報基盤の運転集中度判断方法及びそのシステム
【課題】
車両走行中操向角の変化と前方カメラセンサを介し取得された車両運行状態情報に基づきドライバの運転集中度を判定できるインデックスを算出し、その算出結果を統計的な情報に変換してドライバの集中度を判断する車両運行状態情報基盤の運転集中度判断方法及びそのシステムを提供する。
【解決手段】操向ホイールの変位を感知する操向角センサと、前方カメラセンサと、操向角センサと前方カメラセンサから印加される信号を所定の時間間隔で格納すると共に、インデックス演算部により算出された値を累積させ標準値として管理するデータ格納部と、格納されたデータに基づき定量的インデックスを算出するインデックス演算部と、これを統計的に処理して状態情報を出力する統計処理部と、状態情報を算出し、データ格納部に記録された標準値と比べてドライバの運転集中度を判定する運転集中度判定部と、を含んで構成されたことを特徴とする。
(もっと読む)
暴走防止機構を設けた自動車用のアクセル
【課題】アクセルとブレーキの踏み間違えによる深刻な事故への対策を行う。
【解決手段】自動車のアクセルが過度に強く踏み込まれることによってブレーキをかけるようにする。
(もっと読む)
エチルアルコール検知装置
【課題】運転者の放射する赤外線から血中のエチルアルコールを検知して酒気帯び防止などに利用可能とする。
【解決手段】撮像制御部42は、フィルタ16を切替えて被写体20の赤外線放射または反射光からのエチルアルコールの吸収波長λ1を含む第1波長帯域の第1被写体画像と、エチルアルコールと同じ第1波長帯域に吸収波長を持つ外乱物質の他の吸収波長λ2を含む第2波長帯域の第2被写体画像を撮像してメモリ38に格納する。基準画像登録部40は、登録モードの設定時に、撮像制御部42で結像された第1被写体画像を基準画像として不揮発メモリ36に予め格納している。エチルアルコール検出部44は、第1被写体画像と基準画像に基づいてエチルアルコール含有度を算出し、外乱物質検出部46は第2被写体画像と基準画像に基づいて外乱度を算出する。判定部44はエチルアルコール含有度と外乱度に基づいてエチルアルコールの検出を判定する。
(もっと読む)
運転状態診断装置
【課題】運転者の運転状態の診断の精度向上を図ることが可能な運転状態診断装置を提供する。
【解決手段】車輌100を運転する運転者の運転状態を診断する運転状態診断装置1は、車輌100の前後方向に沿った運転操作又は車輌状態を検出して縦方向信号を生成する縦方向信号生成装置10と、車輌100の幅方向に沿った運転操作又は車輌状態を検出して横方向信号を生成する横方向信号生成装置20と、縦方向信号と横方向信号とに基づいて運転者の運転状態を判定する運転状態判定装置30と、を備えており、運転状態は、「スポーティ運転」と、「急ぎ/イライラ運転」と、を少なくとも含んでいる。
(もっと読む)
運転者疲労度推定装置
【課題】車両の運転者疲労度推定の精度を高める。
【解決手段】車両の運転者の生体情報を取得し、車両の減速開始から停車までの制動期間内に変化した生体情報が、制動期間後に安定化するまでの時間である安定化時間に基づいて、運転者疲労度を推定する。安定化時間に基づいて疲労度を推定すれば、道路環境、交通環境、それらによる運転負荷の変化などによって推定値が影響されることはなく、疲労度を高い精度で推定することができる。
(もっと読む)
覚醒誘導装置
【課題】対象者の覚醒度を正常な状態に適切に誘導することができる覚醒誘導装置を提供する。
【解決手段】覚醒誘導装置10は、運転者の覚醒度を判定する覚醒度判定部16と、運転者のストレス度を判定するストレス度判定部17と、運転者の手を冷却又は加温する空調システム6と、覚醒度判定部16の判定結果とストレス度判定部17の判定結果とに基づいて、空調システム6を制御する温度制御部18と、を備えており、温度制御部18は、末梢血管の収縮に伴って放熱を抑制し又は末梢血管の拡張に伴って放熱を促す生体メカニズムに基づいて、運転者の手の温度を周期的に変化させるように、空調システム6を制御する。
(もっと読む)
車両の制御装置
【課題】運転者の安心感を損なわない範囲で運転の自由度の制限を緩和して、ドライバビリティーを向上することのできる車両の制御装置を提供する。
【解決手段】アクセルペダル4の踏力及び踏力速度からアクセルペダル4の誤踏み込みを判定して、車両の駆動力を低減するコントローラー7は、ブレーキペダル1の踏み位置のずれの傾向を確認するとともに、その傾向に応じて誤踏み込みと判定したときの車両の駆動力の低減幅を可変としている。
(もっと読む)
意識低下判定装置
【課題】運転者の意識低下状態を精度よく判定できる意識低下判定装置を提供すること。
【解決手段】運転者が無操舵状態であるか否かを判定し(S14)、車両の走行車線に対する逸脱危険度が設定値以上であるか否かを判定し(S18)、運転者の操舵量が予め設定される通常操舵量に対し設定値以上掛け離れているか否かを判定し(S22)、無操舵状態であり、逸脱危険度が設定値以上であり、かつ、運転者の操舵量が通常操舵量に対し設定値以上掛け離れていると判定された場合に運転者が意識低下状態であると判定する。逸脱危険度を加味することにより、障害物を避けるような運転操作を意識低下状態であると誤検出することが抑制される。
(もっと読む)
意識低下判定装置
【課題】 無操舵逸脱による不注意状態を精度よく判定することを可能とした意識低下判定装置を提供する。
【解決手段】 道路情報取得手段と車両情報取得手段により、車両が走行している道路の道路情報と車両の走行情報を取得し(ステップS1)、逸脱危険度判定手段が、取得した道路情報、走行情報に基づいて車両の走行レーンからの逸脱危険度MLCを算出し(ステップS2)、判定部は、逸脱危険度MLCが大きく(ステップS3)、かつ、検出した実ヨーレートが小さい場合(ステップS4)に無操舵逸脱状態にあり(ステップS5)、運転者は意識低下状態にあると判定する。
(もっと読む)
ドライバ状態判定装置
【課題】ドライバの意識低下状態を精度よく判定できるドライバ状態判定装置を提供すること。
【解決手段】車両のドライバが意識低下状態であるか否かを判定するドライバ状態判定装置において、接近状態予測値dp(n)が第1閾値A1より大きいか否かを判定し(S16)、大きい場合には接近状態値d(n)が第1閾値A1より大きいか否かの判定を行い(S18)、大きい場合には意識低下判定を行う。また、接近状態予測値dp(n)が第1閾値A1以下の場合は、接近状態値d(n)が第1閾値A1より大きな第2閾値A2を上回っているか否かの判定を行い(S20)、上回っている場合に限り意識低下判定を行う。このように、接近状態予測値dp(n)が小さいときは意識低下の判定閾値を大きくすることにより、車両が一時的に且つ意識的に先行車に近づいた場合における誤判定が抑制される。
(もっと読む)
覚醒度推定装置
【課題】ドライバによるハンドル操作データの周波数特性を取得する際の時間遅れを低減し、短期間の覚醒度低下をも確実に検出する。
【解決手段】現在から過去の25.6秒間のハンドル角データを折り返して未来の25.6秒間のハンドル角データを作成し、この過去の25.6秒の範囲と未来の25.6秒の範囲とを窓関数の区間として、FFT演算を行う。これにより、FFT演算を終了した時点で、窓関数の中心付近のデータすなわち現在付近のデータを重視した覚醒度の推定を行うことができ、過去のデータから周波数成分を算出する従来の手法に比べ、時間遅れの影響を軽減することが可能となる。
(もっと読む)
意識低下判定装置
【課題】未検出や誤検出を抑制することで、運転者の意識低下状態を精度よく判定できる意識低下判定装置を提供する。
【解決手段】予見時間設定部51は、予見時間を0〜4sの間で0.1s刻みで複数設定する。前方偏差演算部52は、運転初期5分間の車両の挙動に対し、複数の予見時間を用いて前方偏差を演算し、各予見時間について、前方偏差と相対操舵角の関係をプロットしたグラフを作成する。最小二乗誤差演算部55は、前方偏差と相対操舵角との最小二乗誤差(前方偏差に対応する操舵角との間の線形性を示す値)を演算し、このような最小二乗誤差を全ての予見時間について演算する。最適予見時間設定部56は、複数の予見時間のうち、最も小さい最小二乗誤差(最も高い線形性を示す値)に対応するものを、最適予見時間として設定する。
(もっと読む)
意識低下判定装置
【課題】車両の走行状態を考慮し車両の逸脱危険度を加味して運転者の意識低下判定を行うことにより、運転者の意識低下状態を精度よく判定できる意識低下判定装置を提供すること。
【解決手段】逸脱危険度MLCの値の保持数が設定数aより大きい場合、かつ、車両Mにおいて操舵がやっと行われて、記憶保持された逸脱危険度MLCが減少する傾向にあると判定された場合、すなわち、操舵が行われず走行車線から逸脱してしまうおそれのある状態からハンドル操作の修正が大きく行われた無操舵後修正過大状態の場合、既に規定された閾値(破線で示された閾値)よりも、所定値(または所定割合)だけ低い値を、この閾値Tに変更して決定する。
(もっと読む)
ドライバ状態判定装置
【課題】ドライバの意識低下状態を精度よく判定できるドライバ状態判定装置を提供すること。
【解決手段】車両のドライバが意識低下状態であるか否かを判定するドライバ状態判定装置において、車両が車両の前方に位置する先行車に接近しているか否かを判定し(S14)、車両のドライバが無操作状態であるか否かを判定し(S18)、車両のドライバが過去所定時間内に運転操作をしたか否かを判定し(S20)、車両が先行車と接近していると判定され、ドライバが無操作状態であると判定され、かつ、ドライバが過去所定時間内に運転操作をしていないと判定された場合に、ドライバが意識低下状態であると判定する。ドライバの過去の運転操作の有無を加味することにより、ドライバの意識的な先行車への接近を意識低下状態であると誤検出することが抑制される。
(もっと読む)
運転者状態検出システム及び運転者状態検出方法
【課題】適切な運転者状態判定しきい値を用いて運転者の異常運転を正確に特定する。
【解決手段】車両のヨーレイトを検出し(S1)、検出されたヨーレイトの実測値の増減が反転する反転ポイントを特定し(S3)、特定された2つの反転ポイントを結ぶ線分から決まる所定時間毎のヨーレートを演算し(S4)、演算された所定時間毎のヨーレートとヨーレイトの実測値との偏差を演算し(S5、S6)、偏差を運転者状態判定しきい値と比較して運転者の状態が異常であるか否かを判断し(S22、S8、S9)、車両の挙動及び運転者による運転操作の少なくとも一方に応じて運転者状態判定しきい値を可変設定する(S21)。
(もっと読む)
状態判定装置、状態判定方法及びプログラム
【課題】簡易な装置で、正確にドライバの状態を判定する。
【解決手段】ドライバの重心の変化に起因する特徴量に基づいて、ドライバの運転状態が属するクラスを判定する。ドライバの重心の変動は、ドライバの覚醒度との相関が高いと考えられる。このため、正確にドライバの状態を判定することができる。また、ドライバの状態の判定に用いる特徴量の算出には、荷重センサ211〜214からの出力を用いる。このため、装置の構造を簡易化することができる。
(もっと読む)
車両運転者の運転能力判定方法及びシステム
【課題】本発明の課題は、運転者の視覚範囲、視覚能力を認識できるシステムを用い、運転者の運転能力を的確に判断し、その運転者に合った運転支援モードを決定する車両運転者の運転能力判定方法及びシステムを提供することにある。
【解決手段】視覚範囲Unが左側に偏っている場合、例えば、自転車の判定用画像10dは見えているが、右からの歩行者の判定用画像10eは見えていない場合がある。このような場合、右側からの対象物に対して特に注意を促すように運転支援モードが決定されるようにすればよい。こうすることで、運転者は自分の現在の状態に合った適切な支援を受けることが可能となり、ひいては安全運転へと繋がり、交通事故の防止効果が高まる。
(もっと読む)
1 - 20 / 61
[ Back to top ]