
Fターム[3D041AA01]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 振動防止 (121)
Fターム[3D041AA01]に分類される特許
1 - 20 / 121
車両の制御装置
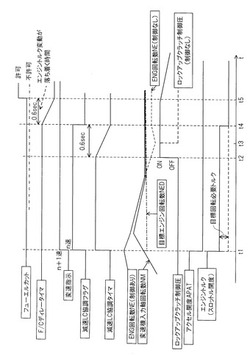
【課題】減速走行状態にあるときにロックアップクラッチを確実に締結させて減速フューエルカットを行わせるようにした車両の制御装置を提供する。
【解決手段】減速走行状態に移行したと判定されるとき、エンジン回転数NEを目標エンジン回転数NEDに制御してアクセル開度APATから決定される値を超えるように前記エンジンの出力トルク(エンジントルク)を増加させる増加制御を実行すると共に、ロックアップクラッチの締結を指令し、ロックアップクラッチの締結が指令されてから所定時間(0.6sec)が経過したとき、エンジンの出力トルクを増加させる増加制御を終了し、エンジンの出力トルクをアクセル開度から決定される値に制御すると共に、エンジンへのフューエルカットを許可する。
(もっと読む)
ハイブリッド車両の制御装置

【課題】運転者の意思等に応じて、NVの抑制と応答性の向上とを調整可能なハイブリッド車両の制御装置を提供する。
【解決手段】ハイブリッド車両の制御装置は、エンジンと、第1回転電機と、第2回転電機と、動力伝達機構と、制御手段と、を備える。動力伝達機構は、相互に差動回転可能な複数の回転要素を備える。制御手段は、第1走行モードから、第2走行モードへ走行モードを切り替える場合、クラッチを係合してからエンジンを始動させる。そして、制御手段は、騒音又は/及び振動の抑制を優先すべき状態では、エンジン回転数を略0にしてから、クラッチを係合状態にし、エンジンを始動させる。
(もっと読む)
パーキングロック装置
【課題】車両の停止状態を保持するようにパーキングロック機構が作動した後に、ブレーキ装置の操作を解除しても予期しない車両の揺動の発生を防止することが可能なパーキングロック装置を提供することを目的とする。
【解決手段】パーキングロック条件が満たされた場合に、Pレンジ成立装置31がパーキングロック機構14をロック状態とする前に、傾斜方向検出装置95で検出された傾斜方向と車両の停止時に自動変速機1によって成立されている走行レンジとに基づいて、車両が路面の傾斜を下る方向に走行する状態から停止したことを検出すると、車両が路面の傾斜を上る方向の走行レンジを自動変速機1に一旦成立させた後に、Pレンジ成立装置31にパーキングロック機構14をロック状態にさせてPレンジを成立させるパーキングロック制御装置32と、を備えるパーキングロック装置。
(もっと読む)
車両用駆動システム
【課題】エコラン走行中のエンジン再始動時にてクラッチを開放状態から係合状態に切り替えるときに発生する振動を抑制できる車両用駆動システムを提供すること。
【解決手段】この車両用駆動システム1は、車両走行中にて、所定のエンジン停止条件の成立によりエンジン2を停止させると共に、所定のエンジン再始動条件の成立によりエンジン2を再始動させるエコラン制御を行う。また、車両用駆動システム1は、エンジン2からの駆動力を変速して出力する変速機5と、エンジン2から変速機5への駆動力の伝達を係合状態にて許容すると共に開放状態にて遮断するクラッチ4と、変速機5およびクラッチ4を制御する制御装置7とを備える。そして、制御装置7は、車両走行中であってエンジン停止条件が成立してクラッチ4を係合状態から開放状態に切り替えるときに、変速機5の変速比γを増加させる変速比増加制御を行う。
(もっと読む)
作業車両
【課題】機体の走行速度を変更することなくエンジンの稼動による振動を振動源とする機体の振動を抑制するこができる作業車両の提供を目的とする。
【解決手段】トラクター100の機体に積載されるエンジン2と、エンジン回転数Reg1を変更する燃料噴射制御装置50と、エンジン回転数Reg1を無段階に変速する無段変速機10と、無段変速機10の変速比を変更する油圧サーボ機構40と、トラクター100の機体の振動を検出する振動検出センサ171と、振動検出センサ171が検出するトラクター100の機体の振動が閾値を超えると、燃料噴射制御装置50によってエンジン回転数Reg1を所定量dRegだけ変更するとともに、無段変速機10の出力軸回転数Rtmがエンジン回転数Reg1を変更する前の出力軸回転数Rtmを維持するように油圧サーボ機構40によって変速比を変更する制振制御を行う制御装置170と、を具備する
(もっと読む)
火花点火内燃機関
【課題】ハイブリッド車両の火花点火内燃機関において、車両減速時にモータ・ジェネレータを発電機として作動させることができないときに、火花点火内燃機関の振動及び騒音の増大を抑制して比較的大きなエンジンブレーキを発生させる。
【解決手段】モータ・ジェネレータと共にハイブリッド車両に組み込まれる火花点火内燃機関において、機械圧縮比可変機構を具備し、車両減速時に前記モータ・ジェネレータを発電機として作動させることができないときには(ステップ102)、自動変速器により機関回転数を高める(ステップ109)と共に機械圧縮比可変機構により実圧縮比を低下させる(ステップ108)。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】自動変速機の入力軸に動力伝達可能に連結された電動機を備える車両用動力伝達装置において、コースト走行中に被駆動状態から駆動状態に切り替わる際に実行される回転同期制御を伴うコーストダウンシフトの際にガタ打ちに伴うショックを抑制する。
【解決手段】車両10が被駆動状態であるときに変速機入力トルクTATを零に向かって制御する際にその変速機入力トルクTATが零に近づくに伴って、車両状態に基づいて変速機入力トルク変化率が抑制されるので、ガタ打ちに伴う振動が抑制される。また、そのガタ打ちを起振源とするガタ打ち後の振動も抑制される。よって、コースト走行中に被駆動状態から駆動状態に切り替わる際に実行される回転同期制御を伴うコーストダウンシフト時において、ガタ打ちに伴うショック(すなわちガタ打ちショックやガタ打ち後の振動的なショック)や歯打ち音が抑制される。
(もっと読む)
車両の駆動力制御装置
【課題】 駆動車輪のスリップに伴う車体振動を抑制できる車両の駆動力制御装置を提供する。
【解決手段】 駆動車輪である左右後輪2c,2dがスリップしたとき、車両の目標駆動力tFo0に応じた動力源(エンジン1、モータ/ジェネレータ5)の目標値(目標エンジントルクtTe、目標モータ/ジェネレータトルクtTm)から当該スリップに起因する車体振動の要因となる成分を除去または低減するフィルタ処理を実施する。
(もっと読む)
車体制振制御装置
【課題】車輪スリップ防止装置の作動→非作動で車体制振制御を再開させるとき、車輪スリップ防止装置が再作動されることのない態様で車体制振制御を再開させるようにする。
【解決手段】車輪スリップ防止装置の作動開始時に制振用制駆動トルク補正量指令dTw*を0にして車体制振制御を中断する。車輪スリップ防止装置の作動時間がT1未満である間、一時的低μ路面と判断し、車輪スリップ防止装置の作動時間がT1以上である間、継続的低μ路面と判断して、車体制振制御を引き続き中断する。車輪スリップ防止装置が非作動になった時からT2時間中は、誤判定防止のために継続的低μ路面の判定結果を維持し、車輪スリップ防止装置が非作動になった時からT4時間をかけて、制振用制駆動トルク補正量指令dTw*を0から徐々に(dTw_Tw+dTw_ΔF)へ復帰させ、制振制御をT4時間だけ遅延させる、制振制御復帰制御を行う。
(もっと読む)
車体制振制御装置
【課題】ピッチング振動の抑制を上下バウンス振動の抑制に優先させて、ピッチング振動の抑制不足による乗り心地の悪化を、多大な工数に頼ることなく防止し得るようになす。
【解決手段】演算部51でアクセル開度APOおよびブレーキペダル踏力BPFから要求制駆動トルクTwを演算し、算出部52で車輪速Vwの変化から前後方向外乱(ΔFf,ΔFr)を算出する。推定部53はTwの変化に伴う車体振動(ピッチング振動θpおよび上下バウンス振動xb)と、外乱に伴う車体振動とを推定する。演算部54は、当該推定したTwの変化に伴う車体振動および外乱に伴う車体振動をそれぞれ抑制するための制振用制駆動トルク補正量を求め、算出部56は、これらトルク補正量と、設定部55からの抑制優先度とから、この優先度を満足しつつ車体振動を抑制するための制振用制駆動トルク補正量指令(dTw*)を求めて、車両の制駆動力を補正する。
(もっと読む)
車体制振制御装置
【課題】車体振動抑制用エンジントルク補正量が制御分解能未満でも、変速により、車体振動抑制用エンジントルクを補正制御する。
【解決手段】サスペンション装置を介して車輪を懸架された車両のバネ上質量である車体の振動を、駆動力補正制御により抑制するための車体制振制御装置において、車体振動を抑制するための制振用駆動力補正量を演算して、駆動力補正制御に資する制振用駆動力補正量演算手段と、該手段で求めた制振用駆動力補正量が設定値未満であるとき、駆動力の伝達系における変速比をハイ側へ変更する変速比変更手段とを具備する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】車輪速から車両振動を推定する装置が、車体制振制御の対象となる車体振動の全てを推定し得るものでない場合でも、当該推定し得ない車体振動を求め得る方法を提供する。
【解決手段】演算部51,52で求めた前輪速VwF、後輪速VwRに基づき、演算部53では車体の上下バウンス速度dZv(F)を求め、演算部54では車体のピッチ角速度dθp(F)を算出し、車体振動のみを表す振動成分(上下バウンス速度dZvおよびピッチ角速度dθp)を抽出。車体振動状態量補完部26は、dZvおよびdθpを微分器26a,26bにより微分して上下バウンス量Zvおよびピッチ角θpを求め、上下バウンス速度dZv(F)およびピッチ角速度dθp(F)と、上下バウンス量Zvおよびピッチ角θpとを演算部27に向かわせ、車体振動を抑制するのに必要な制駆動トルク補正量ΔTdを、車体振動とレギュレータゲインKrとの乗算値の線形和として求める。
(もっと読む)
車体振動推定装置およびこれを用いた車体制振制御装置
【課題】外乱ロバスト性に優れた高精度な推定が可能な車体振動推定装置を提供する。
【解決手段】演算部31,32で求めた前輪速VwFおよび後輪速VwRをバンドパスフィルタ33,34に通し、車体振動を表す車体共振周波数近傍振動成分fVwF,fVwRを抽出する。演算部35,36で、fVwF, fVwRから車体振動を表す前輪の前後方向変位Xtfおよび後輪の前後方向変位Xtrを求め、車体振動に起因した前軸上方車体部の上下変位および後軸上方車体部の上下変位を求め、これらから車体の上下バウンス速度dZvおよびピッチ角速度dθpを算出する。推定器25bではdZv,dθpをオブザーバ入力とし、制駆動トルクrTdから車両モデル37を用いた状態推定を行うことにより、車体の上下バウンス量fZv、上下バウンス速度dfZv、ピッチ角fθp、ピッチ角速度dfθpを推定する。
(もっと読む)
車両の制駆動力制御装置
【課題】 制駆動力を制御することにより、ピッチ挙動やを抑制するとともに上下方向振動を適切に抑制する車両の制駆動力制御装置を提供すること。
【解決手段】 電子制御ユニット30は、車両Ve(より具体的には車体Bo)に発生したピッチ挙動を抑制するピッチ制御の実行中において、上下加速度センサ33から信号を入力し、車体Boの上下加速度Azを検知する。そして、ユニット30は、ピッチ制御に伴って各輪11〜14に発生させる駆動力Fの分力として推定されて車体Boに入力される上下力Fzと検知した上下加速度Azのそれぞれの作用方向が同一方向(振動増幅方向)であるときには各輪11〜14に発生させる駆動力Fを低減または「0」に制御する。一方、作用方向が互いに異なる方向(振動減衰方向)であるときには、駆動力Fを、上下力Fzと上下加速度Azとを用いて決定されるゲインKを乗算して補正する。
(もっと読む)
エンジン自動停止再始動制御装置
【課題】エンジン再始動時の車体の前後方向の振動をより抑制することができるエンジン自動停止再始動制御装置を提供する。
【解決手段】エンジン再始動を行う際に、ショック抑制ブレーキ制御を行い、実車軸トルク変化速度と理想車軸トルク変化速度との間の差である変化速度差に応じた制動トルクを発生させる。これにより、エンジン再始動時に生じる振動トルクを抑制することが可能となり、車体のショックを抑制することが可能となる。
(もっと読む)
車両の制振制御装置
【課題】 通常の制振制御に復帰したときのハンチングの発生を抑制することで制振制御の実行頻度の向上を図ることが可能な車両の制振制御装置を提供すること。
【解決手段】 車体バネ上振動を抑制するような補正トルクに基づいて制駆動トルク発生手段に対し補正トルク指令値を出力するにあたり、補正トルクの振幅が所定振幅以上の状態が所定時間継続しているときは、通常時補正トルク指令値よりも小さな値のハンチング時補正トルク指令値を出力し、その後、補正トルクの振幅が所定振幅以下となる状態が第1の所定時間継続したときは、補正トルク指令値の出力をハンチング時補正トルク指令値から通常時補正トルク指令値に復帰させ、第1の所定時間が経過する前に補正トルクの振幅が所定振幅を超える状態が所定時間継続したときは、ハンチング時補正トルク指令値の出力を継続する。
(もっと読む)
車両の制振制御装置
【課題】走行状況に応じた制振トルクを算出することが可能な車両の制振制御装置を提供する。
【解決手段】車輪に制駆動トルクを発生させる制駆動トルク発生手段と、車輪速に基づいて車両のバネ上振動を抑制するような第1補正トルクを算出する第1補正トルク算出手段と、制駆動トルクに基づいて車両のバネ上振動を抑制するような第2補正トルクを算出する第2補正トルク算出手段と、走行状態に基づいて前記第1補正トルクと前記第2補正トルクに所定の重み付けをした補正トルク指令値を算出し、前記制駆動トルク発生手段に出力する入力信号処理手段と、を備え、車輪速に基づいて車両のバネ上振動を抑制するような第1補正トルクと、制駆動トルクに基づいて車両のバネ上振動を抑制するような第2補正トルクとに、走行状態に基づいて所定の重み付けを行う。
(もっと読む)
車両の制振制御装置
【課題】旋回性能を向上可能な車両の制振制御装置を提供すること。
【解決手段】車輪に制駆動トルクを発生させる制駆動トルク発生手段と、車両のピッチング振動とバウンス振動を抑制するような補正トルクを算出する補正トルク算出手段54と、前記補正トルクに基づいて前記制駆動トルク発生手段に対し補正トルク指令値を出力する補正トルク指令値出力手段56と、車両のピッチング振動よりもバウンス振動を優先的に抑制するような補正トルク指令値を算出するための優先度合いを設定する優先度合い設定手段55とを備えた。
(もっと読む)
産業車両
【課題】車両のピッチング振動を抑制できる産業車両を提供すること。
【解決手段】この産業車両1は、車体22に駆動力あるいは制動力を付与するブレーキ5と、車体のピッチング振動を検出するリフト圧センサ632と、ピッチング振動を低減させるためのピッチング制御トルクを算出すると共にピッチング制御トルクをブレーキ5に出力させるためのピッチング制御信号を生成するピッチング制御ユニット62とを備えている。そして、車両の負荷走行時にて、ピッチング制御ユニット62がリフト圧センサ632の出力値に基づいてピッチング制御トルクを算出して、ピッチング制御信号を出力する。そして、このピッチング制御信号に基づいて、ブレーキ5が駆動される。
(もっと読む)
1 - 20 / 121
[ Back to top ]