
Fターム[3D041AA33]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、目的 (5,475) | 走行性の向上 (1,351) | 減速性の向上 (244)
Fターム[3D041AA33]の下位に属するFターム
エンジンブレーキ性能の向上 (47)
Fターム[3D041AA33]に分類される特許
1 - 20 / 197
車両の制御装置
【課題】アクセルとブレーキの両方が踏み込まれた状態になった場合にエンジンの出力を制限する出力制限制御を実行する車両において、道路状況に応じた適正な条件で出力制限制御を実行して、安全性を向上させることができるようにする。
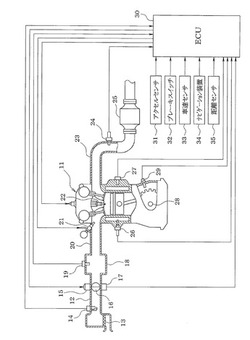
【解決手段】距離センサ35やナビゲーション装置34からの情報に基づいて、前方の車両又は障害物までの距離が所定値以下と判定された場合、次のカーブまでの距離が所定値以下と判定された場合、走行道路の曲率半径が所定値以下と判定された場合、走行道路の下り勾配が所定値以上と判定された場合、次の交差点までの距離が所定値以下と判定された場合のいずれかの場合には、速やかに減速する必要がある道路状況であると判断して、出力制限制御が通常よりも早めに実行されるように出力制限制御の実行条件を変更すると共に、出力制限制御の実行中の車両の減速度を大きくするように制御条件を変更する。
(もっと読む)
車両の制御装置

【課題】 車両減速状態における機関出力制御及びロックアップクラッチ締結制御を適切に行い、運転者の違和感を解消するとともに燃費を向上させることができる車両の制御装置を提供する。
【解決手段】 ロックアップクラッチ30を締結するときの目標メインシャフト回転数NTMOBJに応じてLC制御下限トルクTRQLMLを設定し、車両減速中において機関出力がLC制御下限トルクTRQLMLに達した後はLC制御下限トルクTRQLMLに保持する制御を実行し、機関出力がLC制御下限トルクTRQLMLに保持されている期間においてロックアップクラッチ30の締結を実行する(t2)。機関出力をLC制御下限トルクTRQLMLに保持する出力保持制御を実行することにより、機関回転数NEが目標メインシャフト回転数NTMOBJ近傍に維持される。
(もっと読む)
車両制御装置
【課題】負荷に応じて圧縮比が可変に制御されるエンジンを搭載した車両において、フューエルカットが実行される場合のドライバビリティの低下を抑制することができる車両制御装置を提供すること。
【解決手段】負荷に応じて圧縮比が可変に制御されるエンジンと、無段変速機と、を備え、アクセルオフに応じてエンジンに対する燃料の供給を停止するフューエルカットが実行される(S2−Y)場合、フューエルカットの開始時にエンジンの圧縮比に基づいて無段変速機の変速比を制御する(S6,S7)。
(もっと読む)
ハイブリッド電気自動車の走行制御装置
【課題】エンジン及び電動機を併用した車両減速中においてプレシフト時のトルク抜けに起因する空走感を未然に防止でき、もって走行フィーリングを向上できるハイブリッド電気自動車の走行制御装置を提供する。
【解決手段】例えば奇数歯車機構G1を第5速とした車両減速中には、この第5速を介してエンジンブレーキが駆動輪側に伝達されると共に、電動機の回生トルクが偶数歯車機構G2の第6速を介して駆動輪側に伝達されており、偶数歯車機構G2を第6速から第4速にプレシフトする際には電動機の回生トルクを低下させて一時的に正側に反転させる。そして、この回生トルクの低下と略同期するように駐車ブレーキを作動させて変速機の出力軸に制動力を作用させ、これによりプレシフト中に一時的に低下する回生トルクを補償する。
(もっと読む)
車両制御装置
【課題】車両停車時における乗り心地の向上を図ることができる車両制御装置を提供する。
【解決手段】本発明は、クルーズコントロール制御と先行車に対する追従制御とからなるACC制御を行う車両制御装置1であって、ACC制御中に自車両の停車位置情報を取得する停車位置情報取得部10と、停車位置情報取得部10が停車位置情報を取得した場合に、自車両が停車位置に停車するための走行計画を作成する走行計画作成部11と、走行計画作成部11の作成した走行計画に基づいて、自車両の走行制御を行う車両制御部14と、を備える。この車両制御装置1によれば、ACC制御中であっても、停車位置情報に基づいた走行計画に沿って自車両を停車させるので、先行車との車間距離に基づいて停車させる従来の制御と比べて、スムーズに停車を行うことができ、車両停車時における乗り心地の向上を図ることができる。
(もっと読む)
車両の補助制動装置
【課題】補助制動装置が作動中でもアクセルペダルの踏み込み量に応じた制動力が得られ、頻繁な加速・減速の繰り返しを防止して、省燃費運転を実現する車両の補助制動装置の提供。
【解決手段】車両電子制御ユニット(10)及びその他の電子制御ユニット(20、30)を有し、車両電子制御ユニット(10)とその他の電子制御ユニットは車両内通信システム(L123)により接続されており、補助制動スィッチ(5)のスイッチ位置を検出する補助制動スイッチ位置検出装置(5S)と、アクセルペダル(4)の踏み込み量を計測するアクセルペダル踏み込み量計測装置(4S)を有している。
(もっと読む)
車両の駆動力制御装置
【課題】 アクセルオフによりドライブ走行からコースト走行へ移行する際のショックの緩和と空走感の抑制とを両立できる車両の駆動力制御装置を提供する。
【解決手段】 目標駆動力tFoを算出する目標駆動力演算部30と、推定駆動力Fo^を算出する実駆動力推定手段と、目標駆動力tFoと推定駆動力Fo^との偏差である駆動力偏差ΔFoが減少方向に変化している場合、目標駆動力tFoが所定のトルク閾値Fo_th未満のときには目標駆動力tFoがトルク閾値Fo_th以上のときよりも目標駆動力tFoの変化率を大きく制限する駆動力変化率制限部61と、を備えた。
(もっと読む)
車両制御装置
【課題】複数種類の走行制御による所定区間の相互に異なる分割要求に対して、記憶容量の制限を考慮しつつ適切に所定区間を分割することができる車両制御装置を提供する。
【解決手段】複数種類の走行制御による前記リンクの相互に異なる分割要求に対して、前記リンクが分割された分割区間毎に前記走行負荷情報を記憶する為のメモリ部82の記憶容量が不足する場合に、分割調停部84によりその異なる分割要求が取捨選択されてその異なる分割要求が調停されるので、メモリ部82の記憶容量の制限を考慮しつつ適切にそのリンクを分割することができる。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映させて走行特性および人間の間隔に刺激を与える演出装置を制御する。
【解決手段】車両の走行状態に基づく指標を求め(ステップS2)、該指標に応じて前記車両の走行特性を変化させる車両の制御装置において、前記指標は、前記車両の挙動が機敏になるように前記走行特性を変化させる方向には前記走行状態の変化に応じて迅速に変化し、かつ前記車両の挙動の機敏さが低下するように前記走行特性を変化させる方向には前記走行状態の変化に対して遅れて変化する指標を含み、前記車両の運転者の五感の少なくとも一部に刺激を与える演出装置の出力内容を前記指標に基づいて変化させる(ステップS8,S9)ように構成されている。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
惰行制御装置
【課題】ドライバーのアクセル操作に応じた惰行制御を行うことができ、ドライバーの不快感を低減可能な惰行制御装置を提供する。
【解決手段】所定の学習開始条件を満たし、かつ、アクセル開度速度が、惰行制御開始条件、あるいは惰行制御終了条件で設定されているしきい値範囲外となったとき、当該アクセル開度速度の大きさに応じて、前記しきい値範囲を拡大するアクセル開度速度学習手段6を備えた。
(もっと読む)
制動制御システム
【課題】制動制御を行うときの車両の安定性を向上させることができる制動制御システムを提供すること。
【解決手段】車両の全車輪にそれぞれ配置された制動装置が車両に作用させる制動力である第一制動力、あるいは車両の動力源を車両の駆動輪に対する負荷とすることで車両に作用させる制動力である第二制動力の少なくともいずれか一方により車両を制動する制動制御システムであって、車両に要求される減速度である要求減速度を実現するときに車両に作用させる制動力における第一制動力と第二制動力との割合が、車両の挙動安定性に影響する走行環境(S510,S530,S540)に応じて変化する(S520,S550)。
(もっと読む)
走行制御装置
【課題】自車両の前方に加速や減速が必要となる走行環境がある場合におけるドライバの操作負担を軽減することができる走行制御装置を提供する。
【解決手段】走行制御装置は、まず自車両の前方に加速が必要となる走行環境があるかどうかを判断し、加速が必要となる走行環境がないときは、アクセルをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御し、加速が必要となる走行環境があるときは、自車両を所定の加速度で加速させるように制御する。そして、走行制御装置は、ブレーキがON操作されると、自車両の加速動作を解除するように制御し、その後ブレーキをOFF操作した時点における自車両の速度に応じて定速走行を行うように制御する。
(もっと読む)
車両の運動制御装置
【課題】具体的な制御指針をドライバに提示することにより、ドライバが自己の運転操作に対する指針を得られるような車両の運動制御装置を提供することにある。
【解決手段】中央コントローラ40の理想運動制御部42は、車両の前後方向の加加速度情報を用いて、車両の操舵を制御する。HVI(Human Vehicle Interface)55には、運転者に操舵を開始するタイミング決定のための情報が提示される。運転者は、HVI(Human Vehicle Interface)55により提示される情報に基づいて、操舵開始タイミングを制御する。情報提示手段は、運転者に操舵を開始するタイミング決定のための情報を提示する。情報提示手段により提示される情報に基づいて、運転者により前記操舵開始タイミングが制御される。
(もっと読む)
車両制御装置
【課題】運転者の意思に沿った応答性で所望の加速度を発生させることのできる車両制御装置を提供すること。
【解決手段】アクセルペダル20の操作速度が所定の操作速度よりも速い場合には、駆動装置10を制御する際におけるアクセルペダル20の操作に対する応答特性を高くするので、アクセルペダル20の操作速度が所定の操作速度よりも速く、運転者が駆動力の急激な変化を要求していることを示している場合に、駆動力を急激に変化させることができ、運転者の要求を満たすことができる。この結果、運転者の意思に沿った応答性で所望の加速度を発生させることができる。
(もっと読む)
車輪の制動力推定装置、及び、該装置を備えた車両の運動制御装置
【課題】
摩擦部材の摩擦係数に変動があっても、適正に各車輪の制動力を推定できる車輪の制動力推定装置を提供する。また、該装置によって推定された制動力に基づいて、車両の運動を安定化する車両の運動制御装置を提供する。
【解決手段】
車輪の制動力推定装置は、車両の各車輪に制動力を発生させる制動手段の摩擦部材の押付量を取得する押付量取得手段と、前記車両の前後加速度を取得する前後加速度取得手段と、前記前後加速度に基づいて前記車両に作用する減速力を演算し、該減速力及び前記押付量に基づいて前記制動力を推定する。前記推定手段は、前記車両の全ての車輪の前記押付量の総和に対する前記車両の1つの車輪の前記押付量の比率を、前記減速力に乗じることにより前記制動力を推定する。さらに、前記推定制動力に基づいて、制動制御及び操舵制御のうち少なくとも一方を実行して前記車両の運動を安定化する。
(もっと読む)
油圧制御装置
【課題】エンジンにより駆動されるオイルポンプの油圧をアキュムレータに蓄圧する油圧制御装置を提供する。
【解決手段】動力伝達装置の動力伝達状態を制御する油圧室と、エンジンにより駆動される第1オイルポンプと、電動モータにより駆動され、かつ、第1オイルポンプよりも容量が大きい第2オイルポンプと、第1オイルポンプまたは第2オイルポンプから吐出された油圧を蓄圧するアキュムレータとを有し、第1オイルポンプまたは第2オイルポンプのいずれか一方から吐出された油圧をアキュムレータに蓄圧する油圧制御装置において、油圧室のオイルの消費量が変化するかしないかを判断する判断手段(ステップS1,S2,S3)と、動力伝達装置の油圧室におけるオイルの消費量が変化しないときに、第1オイルポンプの油圧をアキュムレータに蓄圧する蓄圧手段(ステップS4,S5)とを備えている。
(もっと読む)
減速支援システム
【課題】車両の運転者の意図に沿った減速支援制御を行う。
【解決手段】減速支援システム(10)は、車両(1)に搭載され、車両が交差点に進入することを検知する第1検知手段(109)と、車両が交差点に進入した際に、減速制御開始条件が成立したことを条件に、減速支援制御を行う第1減速支援手段(109)と、車両が交差点を右折又は左折するか否かを判定する右左折判定手段(109)とを備える。車両が交差点を右折又は左折すると判定された場合、第1減速支援手段は、車両の運転者が、車両を右折又は左折させるためにハンドルを操舵した方向とは反対方向にハンドルを操舵し始めたタイミングで、減速支援制御を終了する。他方、車両が交差点を右折又は左折しないと判定された場合、第1減速支援手段は、運転者が、アクセルオフからアクセルオンにしたタイミングで、減速支援制御を終了する。
(もっと読む)
車両の運動制御装置
【課題】ステア特性制御と安定化制御との間の制御干渉を抑制できる車両の運動制御装置を提供すること。
【解決手段】ステア特性制御としてスタビライザ制御、減衰力制御等が実行されて、車両のステア特性が車両の走行状態に応じて意図的に初期ステア特性から変更される。安定化制御では、オーバステア状態量Jos(アンダステア状態量Jus)がしきい値Tho(Thu)を超えた場合、制動トルクの調整により発生するヨーモーメントを利用してステア特性が初期ステア特性に近づけられる。ステア特性制御によりステア特性がオーバステア側(アンダステア側)に調整されている場合、しきい値Tho(Thu)が大きくされて、安定化制御が開始され難くなる。ステア特性制御によりステア特性が意図的に調整される傾向が安定化制御の介入により抑制される事態(制御干渉)が抑制され得る。
(もっと読む)
制御要求調停装置
【課題】設計効率の高い制御要求調停装置を提供する。
【解決手段】制御プラットフォーム10では、位置制御要求調停部21が、位置を次元とする複数の制御要求を調停して出力し、位置制御要求変換部22が、位置制御要求調停部21からの制御要求を速度を次元とする制御要求に変換して出力する。そして、速度制御要求調停部31が、速度を次元とする複数の制御要求を調停して出力し、速度制御要求変換部32が、速度制御要求調停部31からの制御要求を加速度を次元とする制御要求に変換して出力する。さらに、加速度制御要求調停部41が、加速度を次元とする複数の制御要求を調停して出力し、加速度制御要求変換部42が、加速度制御要求調停部41からの制御要求を加速度制御を実現する制御装置に応じた次元(例えばトルク)の制御要求に変換して出力する。
(もっと読む)
1 - 20 / 197
[ Back to top ]