
Fターム[3D041AC16]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、構造 (6,089) | 変速装置 (1,781) | 手動変速 (60)
Fターム[3D041AC16]の下位に属するFターム
半自動変速 (12)
Fターム[3D041AC16]に分類される特許
1 - 20 / 48
車両の動力伝達制御装置
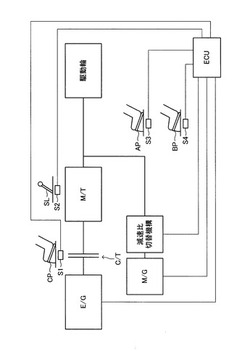
【課題】電動機の出力軸に対する駆動輪の減速比を変更する切替機構を備えたHV−MT車において、運転者が前記減速比の変更に伴うショックを感知し難くすること。
【解決手段】この動力伝達制御装置は、動力源として内燃機関E/GとモータM/Gとを備えたハイブリッド車両に適用され、手動変速機M/Tと、摩擦クラッチC/Tと、減速比切替機構とを備える。減速比切替機構は、「M/Gの出力軸と接続される第1軸」に対する「M/Tの出力軸と接続される第2軸」の減速比を変更可能となっている。第1軸に対する第2軸の減速比を変更することにより、M/Gの出力軸に対する駆動輪の減速比が変更される。運転者がクラッチペダルCPを操作している間に減速比を変更する作動が実行される。即ち、運転者は、何らかの操作を行っている間に減速比変更作動に伴うショックを受けることなり、運転者は係るショックを感知し難くなる。
(もっと読む)
車両走行制御装置

【課題】車両走行時における燃費の向上とブレーキ負荷の低減とを両立することのできる車両走行制御装置を提供すること。
【解決手段】エンジン3で発生する動力によって走行する車両1の走行時に、エンジン3を停止すると共にエンジン3と駆動輪12との間でトルクの伝達を遮断することによって車両1を惰性で走行させる場合に、ブレーキ装置14の負荷を監視し、ブレーキ装置14の負荷状況に応じてブレーキ装置14のみで速度を調節する制御からエンジン3で発生させる減速力も併用して速度を調節する制御へ運転操作を誘導する。
(もっと読む)
惰行制御装置
【課題】惰行制御終了時にタイヤがロックしてしまうなどの危険なモードを回避することが可能な惰行制御装置を提供する。
【解決手段】走行中にエンジンが外部に対して仕事をしないときに、クラッチを断にすると共に、エンジン回転数をアイドル回転数に落とす惰行制御を行う惰行制御装置において、惰行制御中に変速の操作を禁止する変速禁止手段6を備えたものである。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、変速時における適正な同期制御が可能となると共に製品コストの増加を抑制可能とする。
【解決手段】エンジン11にクラッチ12を介して多段変速機13の入力軸37を駆動連結可能とすると共に、モータジェネレータ14に多段変速機13の入力軸37を駆動連結し、多段変速機13の出力軸38に最終減速装置15を介して駆動輪16を駆動連結し、ハイブリッドECU100は、多段変速機13の入力軸37の回転数が、この多段変速機13における最高変速段(第5速の変速段)に応じた規定入力軸回転数以上となるようにモータジェネレータ14を制御する。
(もっと読む)
駆動力制御装置
【課題】車両の走行時におけるステア特性を向上させることができ、かつ、運転者が違和感を持つことを抑制することの可能な駆動力制御装置を提供する。
【解決手段】車両のステア特性を目標ステア特性にするべく、車両の駆動輪の駆動力を制御する駆動力制御装置において、車両の運転者の意図から求めた駆動輪の基本駆動力に対して、車両のステア特性を相対的に向上させるために増加する分の駆動力を求める第1算出手段(ステップS1)と、増加する分の駆動力の上限値を複数の条件に基づいて複数求める第2算出手段(ステップS2,S4,S5)と、第1算出手段により求められた増加分の駆動力を、第2算出手段により求められた複数の上限値のうち最も小さい上限値により制限して、最終的な駆動力の増加量の上限値を求める第3算出手段(ステップS6,S7)とを備えている。
(もっと読む)
車両の作動方法
【課題】従来技術における欠点に鑑みこれを解決すべく改善を行うこと。
【解決手段】変速機と駆動エンジンの間で惰性走行モードが実施され、前記惰性走行モードの経過後にアクセルペダルが操作された場合に、推奨変速段が提供されると共に駆動エンジンの現下の回転数が推奨回転数まで加速され、前記推奨回転数は、車両の現下の速度状況のもとで推奨変速段に対応させる。
(もっと読む)
車両駆動装置
【課題】ダウンシフト時にダブルクラッチ処理とブリッピング処理とギヤ段変更処理とを協調制御するための制御装置100,200を備える車両駆動装置において、前記ブリッピング処理によって変速機3の入力軸回転数が上昇し過ぎた場合でも、前記ブリッピング処理の後でギヤ入れ処理へ速やかに移行可能にするとともに、ギヤ入れ処理での常時噛み合い式の変速機3に備えるシンクロメッシュ機構34A〜34Cによる回転差吸収量を低減可能にする。
【解決手段】制御装置100,200は、前記ブリッピング処理を行うことによって入力軸回転数Niが目標範囲の上限値を上回った場合に、エンジン1をトルクダウンさせることによりエンジン回転数Neを速やかに低下させてから、摩擦クラッチ2を微継合させることにより入力軸回転数Niを低下させながらエンジン回転数Neを上昇させて、それら両方を前記目標範囲に収める補正処理を実行する。
(もっと読む)
車両用パワートレーン制御装置
【課題】駆動系保護のために行われる出力トルク制限の解除可否を適切に判定する車両用パワートレーン制御装置を提供する。
【解決手段】走行用動力源の出力トルクを制御する車両用パワートレーン制御装置100を、出力トルクを要求トルク入力手段の操作量に関わらず所定の制限トルク以下に制限する出力トルク制限手段と、出力トルク制限の解除操作が入力される解除操作入力手段107と、タイヤのグリップ余力を判定するグリップ状態判定手段110とを備え、出力トルク制御手段は解除操作が入力されかつ要求トルク入力手段の操作量が所定値以上である場合に、所定のトルク制限解除期間にわたって出力トルク制限を解除するとともに、グリップ余力の不足を判定した場合は出力トルク制限の解除を禁止する構成とする。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、変速操作のためにクラッチの切断操作等が行われたときに、エンジン回転数が吹き上がることを防止する。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつオートクルーズ制御手段が備えられた車両において、前記オートクルーズ制御手段によるオートクルーズ制御中に、クラッチの切断操作等の動力遮断操作が行われたときに、該操作の直前の状態から手動変速機の変速段を一段シフトアップさせたときのエンジン回転数を目標回転数に設定し、この目標回転数に一致するようにエンジン回転数を制御するエンジン制御手段を備える。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
内燃機関の自動停止制御装置
【課題】減速時シフトダウン操作中に、ドライバの意思に反してアイドルストップ制御によりエンジン10が自動停止すること。
【解決手段】クラッチペダル26の踏み込み操作が開始されてから、シフト位置が駆動状態から非駆動状態へと操作されるまでの操作を第1の操作とする。第1の操作が完了してから、シフト位置が非駆動状態から上記駆動状態よりも変速比の大きい駆動状態へと操作されるまでの操作を第2の操作とする。第2の操作が完了してから、クラッチが伝達状態とされるまでの操作を第3の操作とする。エンジン10の自動停止処理は、クラッチが遮断状態にされたこと及びブレーキ操作がされることを条件に行われる。但し、第1の操作が第1のシフトダウン判定時間T1内に完了する場合、また第2の操作が第2のシフトダウン判定時間内に完了する場合、更には第3の操作が第3のシフトダウン判定時間T3内に完了する場合、上記自動停止処理を禁止する。
(もっと読む)
惰行制御装置
【課題】惰行制御状態のまま車速が増加又は減少し一定以上に達して、車両の減速・加速が遅れてしまう状況の発生を防止する。
【解決手段】車両に搭載されるエンジンが車両の走行に寄与する仕事をしないときに、エンジンと車両の駆動輪との間に介設されるクラッチ51を断にすると共に、エンジンをアイドル状態にして車両を惰性走行させる惰行制御を行う惰行制御装置であって、アクセル開度及びクラッチのドリブン側回転数に基づく惰行制御開始条件が成立したときに、惰行制御を開始し、その惰行制御中にアクセル開度及びクラッチのドリブン側回転数に基づく惰行制御終了条件が成立したときに、惰行制御を終了する制御手段11、12を備え、制御手段11、12は、惰行制御中に惰行制御開始時の車速と現在の車速との差を求め、その差が所定のしきい値以上であるときに、惰行制御終了条件に拘らず惰行制御を終了する。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両に適用される車両の動力伝達制御装置において、EV走行状態において回転中の変速機の入力軸の動力を利用して内燃機関を始動する場合においてドライバビリティの悪化を抑制できるものを提供すること。
【解決手段】電動機出力軸の接続状態を、動力伝達系統が変速機入力軸と電動機出力軸との間で形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で形成される「OUT接続状態」、並びに、いずれにも動力伝達系統が形成されない「ニュートラル状態」の何れかに選択可能な切替機構が備えられる。電動機駆動トルクTmのみで走行するEV走行状態にて内燃機関を始動する場合、クラッチを遮断状態から半接合状態に移行して変速機入力軸の動力により内燃機関の回転速度Neをゼロから増大させる。変速機出力軸が受ける車両減速方向の反トルク(−Te)を考慮して電動機駆動トルクTmを大きくする。
(もっと読む)
変速制御装置およびそれを備えた自動二輪車
【課題】手動モード運転と自動モード運転とを切換可能な自動二輪車において、リンプホーム性を向上させる。
【解決手段】変速制御装置50は、有段のドグクラッチ式のシフト機構43と、シフト機構43のギアポジションを変更するシフトアクチュエータ70と、クラッチ44と、クラッチアクチュエータ60と、運転者によって操作され、シフトアクチュエータ70およびクラッチアクチュエータ60によるシフト機構43のギアポジションの変更を指示するシフトスイッチ72と、運転者によって操作され、手動モード運転と自動モード運転とを切り換えるモード切換スイッチ71と、ECU90とを備えている。ECU90は、所定の故障時に、自動モード運転を規制しかつ手動モード運転を許可する運転許可部93を有している。
(もっと読む)
制御システムおよびそれを備えた鞍乗り型車両
【課題】低コスト化が実現された制御システムおよびそれを備えた鞍乗り型車両を提供する。
【解決手段】シフトペダル210に荷重が加えられると、その荷重は第1のリンク機構220およびシフト軸250等を通して変速機5に伝達される。第1のリンク機構220には、シフトペダル210に荷重が加えられることによりバネの付勢力に抗して移動する可動部材と第1のスイッチSW1とが設けられる。第1のスイッチSW1は可動部材が所定距離移動することによりオンする。このとき、ECU50はエンジンの出力調整を行う。シフト軸250の回転角度に応じてオン/オフが切り替えられる第3のスイッチSW3が設けられる。第3のスイッチSW3は、シフト軸250が回転している状態から基準角度に戻ることによりオフからオンに切り替えられる。このとき、ECU50はエンジンの出力調整を禁止する。
(もっと読む)
変速制御システムおよび車両
【課題】ドライバビリティを向上させることができる変速制御システムおよびそれを備えた車両を提供する。
【解決手段】変速制御システムは、シフトアップ操作装置、クラッチアクチュエータ、シフトアクチュエータおよびCPUを備える。CPUは、シフトアップ操作装置の操作レバーの移動が開始される時点t1において、クラッチアクチュエータを制御することによりクラッチの切断動作を開始する。また、操作レバーの移動が終了される時点t2において、クラッチアクチュエータを制御することによりクラッチの切断動作を完了する。その後、CPUは、シフトアクチュエータを制御することにより変速機のギアポジションをシフトさせる。
(もっと読む)
省燃費運転システム及びその制御方法
【課題】上り坂を走行中に上り坂に関する道路勾配情報データベースを構築することが出来て、上り坂を走行する際に省燃費走行を行なう様なアドバイスや車両制御を行なうことが出来る省燃費運転システム及びその制御方法の提供。
【解決手段】車速を計測する装置(3)と、車両の加速度を計測する装置(4)と、燃料流量を計測する装置(5)と、エンジン負荷を計測する装置(6)と、エンジン回転数を計測する装置(7)と、シフト位置を検出する装置(9)と、上述した各装置からの信号を受信して演算と解析を行なう制御装置(10)とを備え、該制御装置(10)はエンジン出力を演算し、演算されたエンジン出力がエンジン出力規定値(Pa)以上であるが、車両加速度が車両加速度規定値(αa)以下であれば上り坂を走行していると判断する機能を有している。
(もっと読む)
走行制御装置
【課題】ドライバによる人為的な誤操作があったとしても、ドライバの意図せぬ車両の走行(具体的には車両の急発進)を効果的に防ぐことができる走行制御装置を提供する。
【解決手段】走行制御装置は、シフトポジションが前進から後退に切り替わったことを検知した場合、アクセル開度を一時的に制限してエンジントルクを一時的に絞ることにより、車両の走行を制御する。また、走行制御装置は、シフトポジションが前進から後退に切り替わったことを検知していない状態において、車両が後退走行していることを検知したときには、エンジントルクを発生させないようエンジンを制御する。
(もっと読む)
車両の制御装置
【課題】車体の多様な上下振動(バウンシング)を適切に抑制することができる車両の制御装置を提供する。
【解決手段】前後輪を独立して車体に支持するサスペンション機構と、前後輪の制・駆動力を独立して制御可能な制駆動力制御手段(ステップS4)と、走行もしくは制動のために前後輪に作用させる制・駆動力とは別に振動抑制駆動力および振動抑制制動力を前後輪に作用させることにより車体の上下振動を抑制する上下振動抑制手段(ステップS4)とを備えた車両の制御装置において、車体のばね上変位量とばね上速度とばね上加速度とから車体の上下振動を検出する上下振動検出手段(ステップS1,S2)と、車体のばね上変位量およびばね上速度およびばね上加速度の3つのパラメータに基づいて振動抑制駆動力および振動抑制制動力を算出する振動抑制力算出手段(ステップS3)とを備えている。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】変速ショックの発生を好適に抑制する車両用動力伝達装置の制御装置を提供する。
【解決手段】電動機M1は、その回転の変化によりエンジン10の回転速度NEを制御し得るように設けられたものであり、第1変速部16及び第2変速部20の変速を同時期に行い、且つそれら第1変速部16及び第2変速部20の変速比γ0、γAの変化方向が互いに反対方向である場合には、エンジン10の回転速度NEの変化方向が変速を通して常に同一方向となるように電動機M1により制御することを特徴とするものであることから、エンジン10の回転速度NEが上下するのを防止して、スムーズな変速を実現できる。
(もっと読む)
1 - 20 / 48
[ Back to top ]