
Fターム[3D041AD41]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、入力信号 (10,144) | ブレーキ (1,198)
Fターム[3D041AD41]の下位に属するFターム
パーキングブレーキ作動 (55)
急ブレーキ (3)
アンチスキッド作動 (22)
Fターム[3D041AD41]に分類される特許
161 - 180 / 1,118
車両の制振制御装置
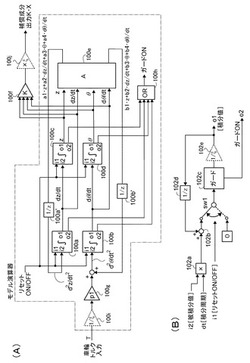
【課題】 車輪トルク制御又は制駆動力制御による制振制御装置に於けるモデル演算器の算出値の波形の頭打ちの現象に関わる不具合に対処すべく制振制御装置の構成を改良すること。
【解決手段】 本発明の車輪トルクを制御することにより車体振動を抑制する車両の制振制御装置は、車両の車体振動モデルに基づいて車体の振動振幅を低減するよう車輪トルクの要求値に重畳されて車輪トルクを補償するための補償成分を算出する補償成分決定部を含み、補償成分決定部が補償成分を算出するためのモデル演算器を含み、モデル演算器の出力値の大きさが所定値に到達したときには、所定値に到達したモデル演算器の出力値に基づいて算出される補償成分が車輪トルクの要求値に重畳されないことを特徴とする。
(もっと読む)
ハイブリッド車両の制御装置

【課題】エンジン停止制御時、差動許容機構を有さない直列接続駆動系でありながら、エンジン再始動時の排気浄化効率の維持と、車速低下の抑制と、燃費の向上と、を併せて達成すること。
【解決手段】駆動系に、エンジンEng、第1クラッチCL1、モータ/ジェネレータMG、第2クラッチCL2、左右タイヤLT,RTを備え、エンジンEngを停止させる際、第1クラッチCL1を締結状態でエンジンEngへの燃料噴射を継続したままでエンジン回転数を低下させ、エンジン回転数N1が所定回転数N2まで低下した段階でエンジンEngへの燃料噴射を停止する。このハイブリッド車両において、エンジン停止制御手段(図4,図5)は、モータ/ジェネレータMGによりエンジン回転数N1を低下させるとともに、第2クラッチCL2をスリップ締結状態とする。
(もっと読む)
車両制御装置
【課題】 減速制御の減速度をドライバが調整できる車両制御装置を提供する。
【解決手段】 車輪に制動力を発生させるブレーキアクチュエータ70と、自車両の前方の環境を検出するカメラ10と、ドライバによるアクセルペダル20の操作状態が加速方向でないとき、環境に応じてブレーキアクチュエータ70を作動させ、あらかじめ設定された基準減速度Accbに応じて車両を減速制御する速度制御コントローラ60と、を備え、速度制御コントローラ60は、速度制御コントローラ60による減速中にアクセルペダル20の操作状態とブレーキペダル30の操作状態とに応じて基準減速度Accbに乗算する減速度補正ゲインKaadjを補正する。
(もっと読む)
先行車追従制御装置および先行車追従制御方法
【課題】 ドライバのブレーキ操作による目標車間距離の変更に伴う車両挙動変化を抑制でき、ドライバに与える違和感を軽減できる先行車追従制御装置および先行車追従制御方法を提供する。
【解決手段】 先行車追従制御装置は、ドライバのブレーキ操作量を検出するブレーキ操作量検出センサ4と、追従制御中に所定量以下のブレーキ操作量が検出された場合、エンジンブレーキによる減速度以下の減速度を発生させる追従制御装置5とを備える。
(もっと読む)
車両制御装置
【課題】 運転者にとってより自然な軌跡を求めることができる車両制御装置を提供する。
【解決手段】 カーブ路における車両の目標走行軌跡を最適化手法に基づいて求める車両制御装置において、そのカーブ路中で目標走行軌跡がカーブ路のレーン内側ラインに最も近接する最近接位置(C/P)がカーブ路通過時間を最短化する場合の最近接位置(C/P)よりカーブ路出口側へ位置させる条件を付加する、具体的には、評価関数にC/Pが後方側へと位置する条件を付加して所望の目標走行軌跡を求める。
(もっと読む)
車両の制御装置
【課題】燃料カットの実行から燃料噴射の復帰への頻度を低減して燃料消費率のより一層の向上を図ることのできる車両の制御装置を提供する。
【解決手段】この車両の制御装置は、燃料カットの実行中に機関回転速度NEが復帰回転速度NERを下回ることを示す条件を条件Aとして、この条件Aに基づいて同燃料カットを終了する内燃機関と、この内燃機関に対してロックアップクラッチを有するトルクコンバータを介して接続される無段変速機とを備える車両の内燃機関及び変速機構の制御を行う。そして、内燃機関の自動停止を行う旨の要求があることを示す条件を条件Bとして、ロックアップクラッチが締結されているとき且つ条件Aが成立しているとき且つ条件Bが成立しているときには燃料カットの実行及びロックアップクラッチの締結を継続する継続制御を行う。
(もっと読む)
運転支援装置
【課題】ドライバに与える違和感を軽減することができる運転支援装置を提供する。
【解決手段】 運転支援装置1のECU7は、自車両の現在位置と地図データベース13の情報とに基づいて、目標車速設定地点での自車両の目標車速等を演算するパラメータ演算部8と、車速センサ5により検出された車速及び目標車速等に基づいて、自車両の目標減速度を演算すると共に、その目標減速度から減速アシスト制御量の変更回数を決定する目標減速度演算部10と、目標減速度演算部10により求められた目標減速度及び車速センサ5により検出された車速に基づいて、シフト段数及びブレーキ制御量を演算する制駆動配分演算部11と、シフト段数及びブレーキ制御量に応じてシフト及びブレーキを制御する車両制御部12とを有している。目標減速度演算部10は、目標減速度が高いほど減速アシスト制御量の変更回数を少なくする。
(もっと読む)
車両における低速運転方向の特定
【課題】自動縦列駐車システム、前方/後方非常ブレーキシステム、及び他の車両システムでは、車両が走行している方向を知る必要がある。車輪速度センサ情報には累積誤差が生じ、車両移動方向を特定することができない。
【解決手段】低速で走行する車両の運転方向を特定する方法及びシステム。該方法は、車両が以下の3つの状態:(1)車両が上向き傾斜面に位置する上り坂状態、(2)車両が下向き傾斜面に位置する下り坂状態、及び(3)車両が平坦な面に位置する平坦な面状態のうちの1つにあるか否かを判断することを含む。該方法はまた、複数の車両センサから情報を入手すること、並びに、車両の判断された状態及び複数の車両センサからの情報に基づいて、車両の移動方向を特定することも含む。
(もっと読む)
制駆動力制御装置
【課題】モードの切り替えにより生じる制動力または駆動力の変化を、一層確実に抑制することのできる制駆動力制御装置を提供する。
【解決手段】アクセルペダルの操作量またはブレーキペダルの操作量のいずれか一方を用いて、車両で発生する駆動力および制動力を求める第1モードと、アクセルペダルの操作量から駆動力を求め、かつ、ブレーキペダルの操作量から制動力を求める第2モードとを相互に切り替えることのできる制駆動力制御装置において、第2モードから第1モードに切り替える条件が成立した際に、アクセルペダルの操作量が所定値を超えると、第2モードから第1モードに切り替えて、アクセルペダルの操作量から駆動力および制動力を求めるモード切替手段(ステップS2ないしS6)を備えている。
(もっと読む)
衝突安全システム
【課題】ドライバーの状態に応じて適切な車両操作の支援および車両制御の実行を可能とする衝突安全システムを提供する。
【解決手段】車両周囲の障害物を検出する障害物検出手段と、車両と障害物とが衝突する危険性が高いか否かを判定する衝突危険度判定手段と、衝突危険度判定手段によって衝突の危険性が高いと判定された場合に、車両の車室内において警報音を鳴動して衝突の危険性を車両のドライバーに報知する警報手段と、車両のドライバーが混乱しているか否かを判定する混乱判定手段とを備える、衝突安全システムであって、警報手段は、混乱判定手段によってドライバーが混乱していると判定された場合、警報音の音量をドライバーが混乱していないと判定された場合に比べて小さくする音量制御手段を含む、衝突安全システムである。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に望ましくない車両の走行状態を回避することで走行安全性の向上を図る。
【解決手段】車両の走行状態に基づいてドライバにとって望ましくない領域、即ち、ジレンマゾーンへの車両の進入を予測する車両進入予測手段(車両走行状態検出手段)と、ドライバにとって望ましくない領域への車両の進入を回避するように出力を調整する出力調整手段とを設ける。
(もっと読む)
惰行制御装置
【課題】エンジンの暖機時間の遅延等を招くことなく惰行制御を行う。
【解決手段】車両に搭載されるエンジンが車両の走行に寄与する仕事をしないときに、エンジンと車両の駆動輪との間に介設されるクラッチ51を断にすると共に、エンジンをアイドル状態にして車両を惰性走行させる惰行制御を行う惰行制御装置であって、エンジン内の冷却水温又は潤滑油温を検出する検出手段13、14と、検出手段13、14で検出したエンジン内の冷却水温又は潤滑油温が所定値より低いときは、惰行制御を開始せず、検出手段13、14で検出したエンジン内の冷却水温又は潤滑油温が所定値以上となったときに、惰行制御を開始する制御手段11とを備える。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に違和感の少ない支援を行うことでドライバビリティの向上を図る。
【解決手段】車両に作用する力を調整して車両の走行を制御可能に構成し、車両の走行状態に応じて車両に作用する力を調整する作用力調整手段と、ドライバが車両の走行を操作する操作部材の操作状態を検出する操作状態検出手段と、操作部材の操作状態に応じて作用力調整手段による調整度合を変更する調整度合変更手段とを設ける。
(もっと読む)
車両の動力伝達制御装置
【課題】動力源として内燃機関と電動機とを備えた車両の動力伝達制御装置において、変速作動終了後にて内燃機関の出力軸と変速機の入力軸との回転速度差が生じた状態でクラッチ機構が接合状態へ切り替えられた場合におけるドライバビリティの悪化の抑制。
【解決手段】変速機入力軸と電動機出力軸との間で動力伝達系統が形成される「IN接続状態」、変速機出力軸と電動機出力軸との間で動力伝達系統が形成される「OUT接続状態」、及び、いずれの間にも動力伝達系統が形成されない「ニュートラル状態」の何れかの状態が選択可能な切替機構が備えられる。変速作動の終了後にクラッチが接合状態へ切り替えられる際、前記回転速度差の存在によりクラッチが半接合状態を経て完全接合状態に移行する場合、半接合状態の期間(t3〜t4)にて、変速機入力軸が受ける「内燃機関出力軸の回転に関する慣性トルク」を考慮して、電動機側駆動トルクTmが調整される。
(もっと読む)
車両用走行制御装置
【課題】追従走行制御に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両用走行制御装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ24と、自車両の車速を検出する車速センサ21と、車速に基づいて目標車間距離を設定する目標車間距離算出部31および目標車間距離設定部33と、車間距離センサ24により検出された車間距離が目標車間距離に等しくなるように走行制御を行なうと共に、先行車両の停止に追従して自車両を停止させる走行制御部35と、自車両の走行路の勾配を取得する勾配取得部32とを備え、目標車間距離設定部33は、勾配取得部32により取得された勾配と車速センサ21により検出された車速とに基づき、目標車間距離を設定する。
(もっと読む)
燃費走行制御時の補助制御装置
【課題】惰行制御時のエンジン回転数の低下に伴うエンジン騒音の変化を低減し、惰行制御時にドライバーが感じる違和感の低減を図った燃費走行制御時の補助制御装置を提供する。
【解決手段】走行中にエンジンが外部に対して仕事をしないときに、クラッチを断にすると共に、エンジン回転数をアイドル回転数に落として惰行制御する燃費走行制御を行う走行体に搭載される燃費走行制御時の補助制御装置であって、前記惰行制御でエンジン回転数をアイドル回転数に落としたときに、その惰行制御前のエンジン騒音を発生させるエンジン騒音発生手段13を備えたものである。
(もっと読む)
車両の走行制御装置
【課題】 現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供する。
【解決手段】 緊急地震速報を受信し、地震対応制御を行う場合において、アクセルペダル操作量APが増加するときは、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APが補正され、補正アクセルペダル操作量APCが算出される。補正アクセルペダル操作量APCに応じてエンジンのスロットル弁開度を制御するスロットルアクチュエータ31の駆動制御が行われる。ブレーキペダル操作量BP及びステアリングホイールの操舵角STについても、ほぼ同様の処理により補正ブレーキペダル操作量BPC及び補正操舵角STCが算出される。
(もっと読む)
作業車の走行制御装置
【課題】本発明は、トロイダル変速機構を搭載した作業車で、変速比を一定にして走行を維持する定車速モードで走行している場合に、旋回操作を行えば急激な走行速度の低下を防止して速やかな旋回を行わせ、作業能率を低下させない作業車を提供することが課題である。
【解決手段】エンジンEが適宜回転数でトロイダル変速機構4の変速比を一定に固定して走行する定車速モードと左右走行装置8の旋回角を検出する旋回角検出手段130を設け、設定速度を定速度T1に設定して定車速モードで走行中に旋回を行うときにおいて、旋回内側のブレーキ作動が始まる直前の前旋回角αで設定速度を増速度T2に変更し、旋回内側のブレーキ作動が終了する直前の終旋回角βで設定速度を元の定速度T1に変更するように制御してなる作業車の走行制御装置の構成とする。
(もっと読む)
惰行制御装置
【課題】惰行制御状態のまま車速が増加又は減少し一定以上に達して、車両の減速・加速が遅れてしまう状況の発生を防止する。
【解決手段】車両に搭載されるエンジンが車両の走行に寄与する仕事をしないときに、エンジンと車両の駆動輪との間に介設されるクラッチ51を断にすると共に、エンジンをアイドル状態にして車両を惰性走行させる惰行制御を行う惰行制御装置であって、アクセル開度及びクラッチのドリブン側回転数に基づく惰行制御開始条件が成立したときに、惰行制御を開始し、その惰行制御中にアクセル開度及びクラッチのドリブン側回転数に基づく惰行制御終了条件が成立したときに、惰行制御を終了する制御手段11、12を備え、制御手段11、12は、惰行制御中に惰行制御開始時の車速と現在の車速との差を求め、その差が所定のしきい値以上であるときに、惰行制御終了条件に拘らず惰行制御を終了する。
(もっと読む)
車速制御装置
【課題】信号機をなるべく停止せずに通過し、燃費の向上や交通渋滞などの緩和をはかる車速制御装置を提供する。
【解決手段】車両の前方の交通信号の表示が切り替わるタイミングに応じて車速を制御する車速制御装置23において、前記交通信号が通行許可表示に切り替わるまでの時間を検出する検出手段43と、その検出手段43で検出された前記時間に、前記交通信号が停止表示である場合に車両が停止すべき位置を表示している停止位置から所定距離手前の位置を通過する際に前記交通信号の停止表示が通行許可表示となる最大車速Vfを求める車速算出手段23と、前記車速算出手段23で算出された車速を指示する車速指示手段51とを備えている。
(もっと読む)
161 - 180 / 1,118
[ Back to top ]