
Fターム[3D041AE04]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 推進装置 (2,853) | スロットル弁開度 (515)
Fターム[3D041AE04]の下位に属するFターム
空気吸入量、吸気管負圧 (32)
Fターム[3D041AE04]に分類される特許
141 - 160 / 483
車両パワートレイン制御方法及び該方法を実行するプログラム
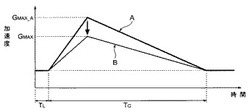
【課題】車両運転条件にかかわらず、ドライバに心地よい加速感を与えることができる車両パワートレイン制御方法及び該方法を実行するプログラムを提供する。
【解決手段】車両を加速操作するための車両パワートレイン制御方法であって、車両加速要求に応じて車両を加速させるための所定期間継続する車両の一次目標加速度波形Aを演算する工程と、一次目標加速度波形Aの最大加速度GMAX_Aが所定制限加速度GMAXとなるように、一次目標加速度波形Aの振幅を前記所定期間TGにわたり略一定の割合(補正係数K)で減少補正した二次目標加速度波形Bを演算する工程と、二次目標加速度波形Bに基づいて車両パワートレインを制御する工程と、を備えた。
(もっと読む)
車間距離制御装置及び車間距離制御方法

【課題】車間距離制御の極低車速域における停止制御の信頼性を向上させる。
【解決手段】先行車との車間距離を目標車間距離とする目標車速を演算し、その目標車速とするための目標制駆動力を演算する車速制御手段と、上記先行車との車間距離を確保しながら自車両を停止させるために必要な大きさの停止制動力を演算する停止制御手段と、を備える。先行車が停止状態であるときに、目標車速が所定車速閾値以下の場合に、上記目標制駆動力による制動から上記停止制動力による制動に切り換える。
(もっと読む)
回転制御装置
【課題】車輪等の負荷がかかった回転体の回転速度の変化を簡単な構成で検出できる回転制御装置を提供する。
【解決手段】接触路面による所定の負荷がかかった状態で回転するタイヤ2に2つのセンサユニット100A,100Bを180度回転対称な位置に装着し、それぞれのセンサユニットに備わる回転接線方向の加速度を検出する加速度センサの検出値を無線送信して、駆動制御ユニット200Aにより受信し、一方の加速度センサによって検出された回転接線方向の加速度の値と他方の加速度センサによって検出された回転接線方向の加速度の値との和の値を算出し、スタビリティ制御ユニット700によってこの加算値と予め設定されている所定の閾値とを比較し、比較結果に基づいてタイヤ2の回転駆動を制御する。
(もっと読む)
車両用駆動力制御装置
【課題】吸気負圧で高められた操作力で発生する作動流体の圧力により車両を制動する制動装置を有する車両において、作動流体の圧力に基づいて算出される要求駆動力に基づいて制駆動力を制御する複数の駆動力制御手段を備える場合に、運転者の意図に合致した制駆動力制御を行える車両用駆動力制御装置を提供すること。
【解決手段】吸気負圧で高められた運転者の操作力で発生する作動流体の圧力により車両を制動する制動装置を有する車両に設けられ、作動流体の圧力に基づいて要求駆動力を算出する駆動力算出手段101,102と、算出された要求駆動力に基づいて設定される制御指令値に応じて車両の制駆動力を制御する複数の駆動力制御手段103,104とを備える車両用駆動力制御装置100であって、複数の駆動力制御手段のうち、予め定められた特定の駆動力制御手段104における制御指令値が、検出または推定された吸気負圧に応じて可変に設定される。
(もっと読む)
車両用運転支援装置
【課題】追従走行制御中に先行車が離脱した場合であっても、直ちにセット車速へ移行する通常の加速制御が開始されることが無く、運転者の意思に沿った良好な走行状態を得ることができるようにする。
【解決手段】追従走行制御中に先行車が離脱した場合、前方障害物が認識されたか否かを調べ(S17)、前方障害物が認識された場合、この前方障害物が予め設定されている複数の種別毎に区分されている障害物特定条件に適合しているか否かを調べ、適合する種別に設定されている基本しきい値Toを3段階の補正値で補正して、第1〜第3の衝突予想時間判定値T1〜T3を設定する。そして、この各衝突予想時間判定値T1〜T3と、自車両1の前方障害物に対する衝突予想時間TTCとを比較し、その比較値に応じて自車両1の加速制御を段階的に制限する(S18,S19)。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】スロットル制御が解除されたときに、運転者自身のアクセルペダルの踏み込み量から予測される車両の挙動と実際の車両の挙動とがスムーズに合致しないと感じることがあった。
【解決手段】自車両のアクセルペダルの位置と駆動源の出力の調整量とについて予め設定された対応関係を適用せずに前記調整量を制御し、前記対応関係を適用せずに前記調整量が制御されることによって前記自車両が基準車速で走行する基準車速走行区間の終了地点を、前記自車両が通過したか否かを判定し、前記自車両が前記終了地点を通過したと判定されると、通過した時点での実際の調整量に対して前記対応関係を適用した場合のアクセルペダルの位置と、通過した時点での実際のアクセルペダルの位置と、のずれを解消する方向に前記アクセルペダルを駆動するための制御を行う。
(もっと読む)
車両用運転支援装置
【課題】自車走行路以外の状況についても十分に考慮し、ドライバのフィーリングにあった好適な車速で走行制御を行うことができる車両用運転支援装置を提供する。
【解決手段】走行制御ユニット6は、画像認識装置5で認識した車外情報に基づいて、自車走行路に隣接する隣車線の渋滞状況を判定し、隣車線が渋滞していると判定した場合には、ACC制御の目標車速Vtrgtを予め設定された渋滞時用の低車速に変更する。これにより、隣車線渋滞時の自車1の無駄な加速、高い速度での走行がなくなり、ドライバに安心感を持たせることができる。しかも、隣車線渋滞時には低速で走行することにより、隣車線からの急な割り込み車両や万一の歩行者の飛び出し等に対しても十分な対処時間を確保することができる。
(もっと読む)
車両用走行制御装置及びその方法
【課題】他の車両についての情報が得られなくなる場合でも、該他の車両を対象とした制御を適切に行う。
【解決手段】車両用走行制御装置は、他の車両の情報を取得し(ステップS8)、自車両がカーブに侵入する前に、その取得した他の車両の情報を基に、該カーブ区間で自車両とすれ違う可能性のある対向車両の有無を判定し(ステップS9、ステップS10)、対向車両有りと判定した場合、カーブ区間を走行する該対向車両に対応しつつ、カーブに対応して自車両の制御を行う(ステップS11〜ステップS18)。
(もっと読む)
車両用走行支援装置
【課題】歩行者に対して必要以上に長い安全距離が確保されてしまうことを防止した車両用走行支援装置を提供すること。
【解決手段】自車両進行方向に存在する歩行者との最接近時に安全距離が確保されるように自車両の走行を支援する車両用走行支援装置が、歩行者の顔向きを検出し、この顔向きから歩行者の視界を推定し、推定された歩行者の視界内に自車両が入っている場合には、入っていない場合よりも小さい回避領域を設定し、この回避領域を通過しないように自車両を目的地まで走行させる。
(もっと読む)
シフト位置指令制御装置
【課題】低圧縮比ディーゼルエンジンにおいて、燃焼不安定性を回避しつつ触媒の暖機が促進されるように、適切にシフト位置の指令を出す。
【解決手段】シフト位置指令制御装置は、低圧縮比ディーゼルエンジンからの動力が伝達される変速機におけるシフト位置の指令を行う。具体的には、シフトアップ指令手段は、低圧縮比ディーゼルエンジンにおける水温、及び排気通路上に配設された触媒の温度の少なくともいずれかに応じて、変速機に対するシフトアップ指令(ハイギヤ指令)を出す。これにより、低水温時での低圧縮比ディーゼルエンジンにおける燃焼不安定性を適切に回避することが可能となる。また、触媒の暖機を適切に促進することが可能となる。
(もっと読む)
エンジントルク制御装置
【課題】ダウンシフト変速時にエンジンの出力トルクが反転してゼロクロスショックが起こらないようにする
【解決手段】自動変速機2側への動力伝達がトルクコンバータ3を介して行われるエンジン1のトルク制御装置であって、目標エンジントルクを決定する目標エンジントルク決定部51と、エンジンを制御して目標エンジントルクを出力させるエンジン制御部53と、目標エンジントルクを補正する目標エンジントルク補正部52とを備え、目標エンジントルク補正部52は、ダウンシフト変速開始時のエンジン1の出力トルクが正トルクである場合には、ダウンシフト変速時に出力トルクを正トルクで維持するために目標エンジントルクを増加させる補正量を決定して目標エンジントルクを補正し、エンジン制御部53は、補正後の目標エンジントルクに基づいてエンジンを制御して、出力トルクが、正トルクから逆トルクに反転しないようにした。
(もっと読む)
車両の運動制御装置
【課題】車両がカーブに進入する際において運転者が受ける安心感が考慮されて減速制御が実行される車両の運動制御装置を提供すること。
【解決手段】この装置では、運転者の安心感に影響を与える、カーブの曲率半径、登降坂勾配(上り・下り勾配)、ブラインドカーブ、及び勾配急減部分の4つの観点が考慮されて許容横加速度基準値Gyaが補正されて許容横加速度Gyoが演算・調整される。この調整された許容横加速度とカーブの曲率半径とに基づいてカーブを通過する際における適正車速が決定される。そして、所定の減速制御開始条件が成立すると、運転者の加減速操作の有無にかかわらず、減速制御が開始・実行されて、車速が上記適正車速まで減速される。このように、運転者の安心感が考慮されて許容横加速度(従って、適正車速)が決定されるから、運転者に違和感を与えることなく、減速制御が実行され得る。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】前方の道路の情報に基づいて運転支援を行う運転支援装置において、分岐地点より先のいずれの分岐道路に進行するかを特定することが困難であって、分岐道路の特徴が類似していない場合、いずれの分岐道路に自車両が進行したとしてもより安全にその分岐道路を走行できるような運転支援を行うことができなかった。
【解決手段】自車両が走行する自車走行道路において、前記自車両の前方に存在する分岐地点に接続する複数の分岐道路に関する分岐道路情報をそれぞれ取得し、複数の前記分岐道路情報を参照し、予め決められた走行注意度合いの判定基準に基づいて、前記複数の分岐道路の中で最も前記走行注意度合いの高い分岐道路を選択し、選択された分岐道路に応じた運転支援を行わせる。
(もっと読む)
車両走行制御装置
【課題】 ドライバの乗り心地感の低下を招くことなく、先行車両に対する追従走行制御を行うことができる車両走行制御装置を提供する。
【解決手段】 車間制御ECU1は、先行車両との車間時間が目標車間時間よりも短い場合に、制御ブレーキをかける制御を行う。車間制御ECU1では、制御ブレーキがかけられる制御ブレーキ頻度を算出している。この制御ブレーキ頻度が所定のしきい値を超えた場合には、目標車間時間を長く調整する。
(もっと読む)
エンジンの制御装置
【課題】この発明は、スロットル開度の制御と外部補機とエンジン付随補機とを含めた統合的なエンジン出力制御に関し、エンジンの出力感を維持して走行フィーリングを確保し、過渡状態における燃費性能の向上と排気ガス浄化性能の向上を実現することを目的とする。
【解決手段】この発明は、エンジンの制御装置において、制御手段は、予め外部補機、エンジン付随補機、有段変速機の駆動/停止状態の切り替えタイミングに順位を設定するとともに、これらの状態変化に合わせて電子スロットルバルブのスロットル開度を変更制御する機能を有し、加速時には、所定のスロットル開度に向けて前記電子スロットルバルブのスロットル開度を漸増させるとともに、所定スロットル開度に達した際に切り替えタイミングの順位に従い外部補機、エンジン付随補機、有段変速機の駆動/停止状態の切り替え変更を順次行うように制御することを特徴とする。
(もっと読む)
内燃機関の電子制御装置及び速度制御方法
【課題】スロットルバルブの開度の変更及びバルブの駆動位相の変更等に起因する速度の変動を低減して、目標速度を安定して維持することのできる内燃機関の速度制御装置を提供する。
【解決手段】スロットルバルブ駆動機構37によるスロットルバルブ36の開度を制御するスロットルバルブ制御部8Aと、可変バルブタイミング機構6によるバルブの駆動位相を制御するバルブ位相制御部8Bとを備えた内燃機関の電子制御装置8であって、前記バルブ位相制御部8Bに、前記スロットルバルブ制御部8Aによる前記スロットルバルブ36の制御開度が一定の下で目標速度を維持するように、前記バルブの駆動位相を制御する定速制御部8Cを備えている。
(もっと読む)
車両走行制御装置
【課題】タイヤのグリップ力をグリップロス度として正確に検出し、検出したグリップロス度に基づいて車両の操舵制御及び車両の走行特性を制御して運転者に違和感を与えないようにした車両走行制御装置を提供する。
【解決手段】電動パワーステアリング機構用コントローラ15で、路面側から伝達されるセルフアライニングトルクをSAT検出手段35で検出すると共に、車両の横力に基づいてセルフアライニングトルク推定値SATpをSAT推定部41で推定し、両者に基づいてタイヤのグリップが失われた度合を表すグリップロス度をグリップロス度検出手段23で検出し、検出したグリップロス度gに基づいて補償値補正手段24でセルフアライニングトルク補償値SATc等の補償値を補正して操舵補助電流指令値を補正する。また、走行制御用コントローラ81で、グリップロス度gに基づいて減速制御、走行安定性制御等を行う。
(もっと読む)
車両用動力伝達装置の制御装置
【課題】変速ショックの発生を好適に抑制する車両用動力伝達装置の制御装置を提供する。
【解決手段】電動機M1は、その回転の変化によりエンジン10の回転速度NEを制御し得るように設けられたものであり、第1変速部16及び第2変速部20の変速を同時期に行い、且つそれら第1変速部16及び第2変速部20の変速比γ0、γAの変化方向が互いに反対方向である場合には、エンジン10の回転速度NEの変化方向が変速を通して常に同一方向となるように電動機M1により制御することを特徴とするものであることから、エンジン10の回転速度NEが上下するのを防止して、スムーズな変速を実現できる。
(もっと読む)
車両用運動制御装置
【課題】ドライバに減速感を感じさせることなくアンダーステアを抑制する車両用運動制御装置を提供する。
【解決手段】運動制御装置を、車両の後輪70を駆動するモータ50と、モータに電力を供給する電力供給手段110,120と、車両の旋回時におけるアンダーステアを検出する挙動検出手段100と、ドライバからの加速要求を検出する加速要求検出手段14と、車両がアンダーステアでありかつ加速要求が検出された際に、モータに後輪を駆動させてアンダーステアを抑制する方向のヨーモーメントを発生させる挙動制御手段130とを備える構成とする。
(もっと読む)
車両の制御装置
【課題】運転状況に応じて適切に制駆動力制御を行うことができる車両の制御装置を提供すること。
【解決手段】シフトレンジを切り換えることにより車両の制駆動力を制御する処理と、事故を回避する事故回避動作および事故の発生のうち少なくともいずれか一方の有無を判定する処理とを実行するSBW−ECU4と、車両を加速させる加速操作を検出する加速操作検出手段22とを備え、SBW−ECU4が、事故を回避する事故回避動作および事故の発生のうち少なくともいずれか一方の有無を判定し、かつ、加速操作検出手段22が加速操作を検出した場合に、SBW−ECU4が加速操作を誤操作であると判断して、シフトレンジをニュートラルレンジNおよびパーキングレンジPに切り換えることにより車両を減速させるよう制駆動力を制御するよう構成する。
(もっと読む)
141 - 160 / 483
[ Back to top ]