
Fターム[3D041AE04]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 推進装置 (2,853) | スロットル弁開度 (515)
Fターム[3D041AE04]の下位に属するFターム
空気吸入量、吸気管負圧 (32)
Fターム[3D041AE04]に分類される特許
121 - 140 / 483
側方障害物回避装置及び側方障害物回避方法
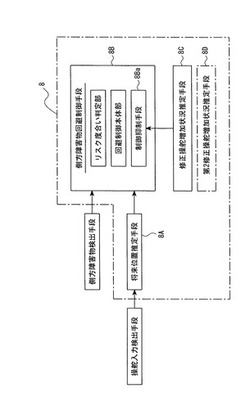
【課題】側方障害物回避の制御による車両挙動の変動を抑制して、運転者への違和感を低減する。
【解決手段】所定時間後の自車両の将来位置に基づき、自車両側方に位置する障害物に対するリスクが高い場合には障害物への接近を防止する方向に自車両を制御する。このとき、運転者による修正操舵が増加する状況と推定する場合には、制御の開始を遅らせたり制御量を小さくしたりして、上記制御を抑制する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム

【課題】車速を所望の車速に収束させることが困難であるとともに過度に加減速が繰り返されてスムーズに走行することができない。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、前記所定区間を前記目標車速で走行するために前記自車両を前記目標車速とすべき目標地点に到達する前に前記自車両の変速比を前記加速変速比に設定させ、前記目標地点から前記所定区間の終了地点まで前記自車両の車速が前記目標車速以下となるように制御するとともに、前記目標地点に到達する前に前記自車両の車速が前記目標車速と一致した場合に、当該一致した一致地点から前記所定区間の終了地点まで前記自車両の車速が前記目標車速以下となるように制御する。
(もっと読む)
車両制御装置
【課題】車両制御装置において、目標加速度に対する実加速度の応答遅れを低減すること。
【解決手段】ブレーキフィードバック制御部は、ブレーキフィードバック利用状態であれば、PID制御モデルを用いてブレーキフィードバックトルクTfb_BKを演算し(S330,S340)、ブレーキフィードバック制限状態であれば、PID制御モデルを用いたブレーキフィードバックトルクTfb_PTの演算を停止し、ブレーキ制限開始タイミング時に出力していたブレーキフィードバックトルクTfb_BKを出力値として保持する(S360)。そして、ブレーキ制限解除タイミングとなると、保持していたブレーキフィードバックトルクTfb_BKを初期値として、フィードバック制御を再開する。これにより、ブレーキ制御解除タイミング直後のブレーキ機構では、0[N・m]よりも大きい特定制動トルクを発生する。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】減速をした後に加速する際にスムーズに加速することができなかった。
【解決手段】自車両の前方の所定区間を走行する際の目標車速を取得し、前記所定区間を走行した後に前記自車両を前記目標車速よりも大きい車速に加速させるための変速比である加速変速比を取得し、自動変速と手動変速とを設定するための変速設定部における設定内容を示す情報を取得し、前記変速設定部にて手動変速が設定されている場合には、前記所定区間の開始地点に到達する前に、当該加速変速比を示す案内を行う。
(もっと読む)
車両の制御装置
【課題】EGR弁閉じ異常時において失火発生抑制のためスロットル弁開度を大きくすることに起因する内燃機関の出力トルクの増大に伴って発生する問題に対処すること。
【解決手段】車両停止中において、EGR弁閉じ異常の発生を受けて失火抑制制御によりスロットル弁開度が大きくされた場合、急発進抑制制御により自動変速機の減速比が小さくされる。この結果、駆動輪の駆動トルクが減少し、失火抑制制御に起因するエンジン出力トルク増大により車両発進時の加速度が過剰となる事態の発生が抑制される。急発進抑制制御が実行された状態で車両発進後、車体速度が所定速度に達した場合、車速抑制制御により自動変速機の減速比が大きくされる。この結果、車体速度が、減速比が大きい変速段の場合におけるエンジンの最大運転速度に対応する速度以下に制限されるから、エンジン出力トルク増大により車両走行時での車体速度が過剰となる事態の発生が抑制される。
(もっと読む)
内燃機関の制御装置
【課題】過渡減速時に、EGR過剰に起因するドライバビリティの悪化や燃焼悪化などを適切に抑制することが可能な内燃機関の制御装置を提供する。
【解決手段】内燃機関の制御装置は、EGR装置を有する内燃機関に対して制御を行うために好適に利用される。具体的には、制御手段は、排気ガスの還流中に内燃機関の回転数及び負荷を減少させる要求があった際において、EGR率が所定値以上である場合に、EGR率が当該所定値未満となるまで、定常時よりも吸入空気量を増加させる制御を行う。これにより、過渡減速時のEGRガスの減少側への制御遅れがあっても、一時的なEGR量の増加を適切に抑制することができる。よって、EGR過剰に起因するドライバビリティの悪化や燃焼悪化を効果的に抑制することが可能となる。
(もっと読む)
車両の定速走行制御装置
【課題】制御系の制御対象をスロットル開度と変速比の2つを入力、車速を出力とするモデルで記述することにより、スロットル開度と変速比を協調させて定速走行制御を行うようにした定速走行制御装置を提供する。
【解決手段】エンジンと、その出力を変速する変速機と、それらが搭載される車体とを少なくとも備えた車両の定速走行制御装置において、車両システムを制御対象とし、少なくとも変速比とスロットル開度とを入力、車速を出力とするモデルで記述すると共に、車速が目標車速に一致するように、変速比とスロットル開度を制御する制御系(定速走行制御コントローラ)を備えると共に、制御系の指令に応じてエンジンのスロットルバルブを駆動してスロットル開度を調整するDBW機構と、変速機に油圧を供給する油圧機構などを備える。
(もっと読む)
車両の制御装置および制御方法
【課題】ダウンシフト中にエンジン出力を増加させる制御が行なわれる車両において、エンジン回転数を高回転領域に維持するダウンシフトを可能にしつつ、ダウンシフト変速中のエンジン回転数が許容回転数を超えることを抑制する。
【解決手段】ECUは、ダウンシフトが開始された場合、ブリッピング量の通常値を算出し(S200)、ダウンシフト開始前にダウンシフト許可回転数の上昇処理が行なわれていた場合(S210にてYES)、車速Vに基づいて現在の減速度ΔVを算出し(S220、S230)、現在の減速度ΔVがダウンシフト要求時の減速度ΔVSよりも小さいと(S240にてYES)、通常値よりもブリッピング量を低下させる(S250)。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】自車両の前方の道路区間において運転支援制御を実施するか否かを、ユーザが選択することができなかった。
【解決手段】自車両の周辺の道路の特徴を示す特徴情報を取得し、運転支援制御を実施する候補とする道路の特徴を示す候補特徴情報を取得し、前記候補特徴情報に示される特徴と合致する特徴が前記特徴情報に含まれる場合、前記運転支援制御の実施可否を、ユーザに選択させるための案内を行い、前記ユーザの選択を示す情報を取得し、前記ユーザが前記運転支援制御の実施を許可すると選択した場合、前記運転支援制御を行う。
(もっと読む)
乗員保護装置
【課題】より適切な乗員保護を行うことができる乗員保護装置を提供すること。
【解決手段】本発明による乗員保護装置1は、両の乗員の意識の向上又は低下を数値で示す項目Cを検出する意識検出手段3aと、項目Cが第一閾値αにより定められる第一領域内となる場合に、乗員の覚醒を促す覚醒手段6aと、項目Cが第二閾値βにより定められる第二領域内となる場合に、車両を退避させる退避手段3b、3cと、退避手段3b、3cが作動可能であるかを判定する判定手段3dを備えるとともに、項目Cが第二領域内となる場合であって、判定手段3dが退避手段3b、3cは作動可能であると判定する場合に、覚醒手段6aによる覚醒を禁止する禁止手段3eを備えることを特徴とする。
(もっと読む)
運転支援装置
【課題】カーブ進入時における運転者の違和感を軽減した運転支援装置を提供する。
【解決手段】車両の運転を操舵トルクの付与により支援する運転支援装置において、車速検出手段120と、操舵角、ヨーレート、求心加速度の少なくとも1つを検出する操舵実際値検出手段130と、カーブの曲率を取得するカーブ曲率取得手段110と、操舵目標値を算出する操舵目標値算出手段160と、操舵機構10へ操舵トルクを付与する操舵制御を実行する操舵制御手段170と、操舵目標値と操舵実際値に基づいて操舵制御の実行を予測する操舵制御予測手段180と、操舵制御の実行が予測される時に操舵制御の実行に先立って第1の減速制御を実行する第1の減速制御手段180とを備える構成とする。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】定速クルーズ走行中、運転者に違和感を覚えさせない車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】アクセルペダル12に対する反力Frを急増させるペダル操作量Pを、車両100が走行している際の目標スロットル弁開度θtと基準スロットル弁開度θrとの差D1、D2に応じて変化させる。これにより、車両100が坂道に差し掛かった等、車両100に対する外的負荷が変わったため、クルーズ速度Vcrを維持するためにエンジン30の出力を増減させる場合、前記外的負荷に応じてペダル操作量Pを変化させることができる。その結果、エンジン30の出力とペダル操作量Pのずれに起因する違和感が運転手に発生することを防止することができる。
(もっと読む)
車両走行制御装置及びその方法
【課題】車両が衝突した場合に適切な処理を車両に施す。
【解決手段】車両走行制御装置50は、車両10の衝突を検出する衝突検出センサ16、18により衝突が検出されたとき、走行速度制限部22Aにより車両10の最高走行速度を制限速度に制限するようにしているので、衝突発生後の車両10を適切な速度で走行移動させることができる。衝突時の車両の最高走行速度は、例えば、運転中に直ちに停車できる徐行速度程度に制限する。
(もっと読む)
車両の制御装置
【課題】自動変速機の係合要素の係合油圧の学習がダウンシフト時に良好に行なわれる車両の制御装置を提供する。
【解決手段】車両の制御装置は、複数の変速段を減速側にシフトさせるダウンシフト指示を入力するための入力部であるシフトレバー8004と、入力部からのダウンシフト指示に応じて自動変速機の変速を制御するECU8000とを備える。ECU8000は、ダウンシフト指示に応じて原動機の出力を増大させ、複数の係合要素のうちの第1の係合要素の係合油圧を制御パラメータに基づいて変速を進行させ、原動機の出力を減少させ、変速の進行度合いに基づいて制御パラメータを学習する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】車両減速時などの燃料カットを伴う機関自動停止時に、高圧燃料ギャラリ内の燃圧を始動に適した燃圧まで低下させつつ、燃料カットに伴う触媒の酸素ストレージ量のリーン化を吸収・相殺し、触媒の酸素ストレージ量を良好に中立状態へ復帰させる。
【解決手段】駆動輪に接続するモータジェネレータと内燃機関との間にクラッチを介装する。複数の燃料噴射弁に接続する高圧燃料ギャラリへ高圧燃料を供給する高圧燃料ポンプを有する。車両減速要求時に、クラッチを開放するともに(S12)、このクラッチ開放から燃料カット(S17)までの間に、リッチ側の目標空燃比で燃料噴射するリッチ運転を行う(S16)。また、機関始動用の燃圧までの燃圧低下量を算出し(S13)、燃圧低下量が大きい場合、リッチ運転の前に予備燃料カット運転を行う(S15)。
(もっと読む)
車両制御装置
【課題】ドライバの個人毎の好みに適合したタイミングで減速制御あるいは加速制御を実行することができる車両制御装置を提供する。
【解決手段】
自車の走行中に補正接近離間状態評価指標KdB_cを算出し、その補正接近離間状態評価指標KdB_cをその算出時の車間距離Dとともに運転者別に記憶装置60に記憶する。そして、記憶装置60に運転者別に記憶されている補正接近離間状態評価指標KdB_cの距離毎の最大値を求め(S10)、その最大値に基づいて、先行車との距離Dと距離毎の補正接近離間状態評価指標KdB_cの最大値との関係式を決定する(S20)。さらに、その関係式を補正することで、加減速制御の実行開始タイミングか否かを判別するための閾値を算出する速度制御開始判別式を決定する。
(もっと読む)
停車時後退防止装置
【課題】運転者がアクセル操作により登坂路停車を行おうとした場合でも、自動ブレーキにより当該登坂路停車を実行させて、自動変速機内のクラッチ寿命を延ばす。
【解決手段】登坂路走行中アクセルを釈放し、ブレーキ操作なしに車両を、車速VSPが図示のごとく低下するよう減速させ、t1に車速VS=0の停車状態となり、その後t2より、運転者が図示のアクセル開度APOによって停車状態を維持しようとした場合、アクセル対応目標駆動力tTdが勾配対応駆動力Td(θ)以下であるt3までは、ヒルホールド力ブレーキ配分率αを100%に向け一定の時間変化割合で増大させ、t3〜t4間におけるごとくtTd≧Td(θ)であれば、αを一定の時間変化割合で0%へと低下させる。よって、ヒルホールドブレーキ力hTb=tTd×α、および、クラッチ経由車輪駆動力cTd=tTd−hTbはそれぞれ図示のごときものとなり、アクセル操作により登坂路停車を行おうとした場合でも、ヒルホールドブレーキ力hTbにより登坂路停車が可能である。
(もっと読む)
車両の制御装置及び制御方法
【課題】本発明は、車両の制御装置及び制御方法において、加速ピーク後の立ち下がり時の加速度を制御することで、立ち下がり時のトルク感のある加速度波形(G波形)を演出して、車両の加速感を高めることができる車両の制御装置及び制御方法を提供することを目的とする。
【解決手段】S7では、この目標加速度Gの時系列データをもとに、エンジン出力をフィードバック制御で制御する。具体的には、車両の実加速度Gが目標加速度Gとなるように、スロットル開度や点火タイミング等を変化させてエンジン出力を制御する。
(もっと読む)
車両の制御装置
【課題】多大な工数を要することなく、変速時に変速機にかかる荷重を低減することができる車両の制御装置を提供する。
【解決手段】変速要求信号を受信すると、ECUは、まず、(a)第1のトルクダウンを行い、クラッチ2が完全継合状態にあるときのドライブラインの振動系の固有周期T1の略半分の時間が経過したときに、(b)第2のトルクダウンを行うことにより、第1のトルクダウンによって生じる駆動捩り振動と、第2のトルクダウンによって生じる駆動捩り振動とを逆位相の関係にし、(c)第2のトルクダウン完了後の駆動捩り振動を相互に打ち消し合うようにする。
(もっと読む)
走行制御システム
【課題】自車両や自車両周辺の車両の運転者に驚きや不快感を抱かせることなく、先行車両の追い越しを自動的に実行させる走行制御システムを提供すること。
【解決手段】自車両Vと先行車両Pとの間の車間距離を所定距離に維持するよう自車両Vの走行速度を制御する走行制御システム100は、自車両V及び先行車両Pの走行状態に基づいて自車両Vによる先行車両Pの追い越しの適否を判定する追い越し適否判定手段11と、先行車両Pの追い越しが適切であると判定した場合に、追い越しの準備動作を実行する追い越し準備動作実行手段12と、走行環境と自車両V及び先行車両Pの走行状態とに基づいて自車両Vによる先行車両Pの追い越しの可否を判定する追い越し可否判定手段13と、先行車両Pの追い越しが可能であると判定した場合に追い越しを実行する追い越し手段14とを備える。
(もっと読む)
121 - 140 / 483
[ Back to top ]