
Fターム[3D041AE04]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 推進装置 (2,853) | スロットル弁開度 (515)
Fターム[3D041AE04]の下位に属するFターム
空気吸入量、吸気管負圧 (32)
Fターム[3D041AE04]に分類される特許
61 - 80 / 483
内燃機関システムの制御方法および内燃機関システム
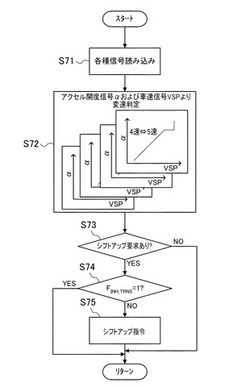
【課題】吸気弁の閉弁時期を早閉じ範囲と遅閉じ範囲とに設定し、該閉弁時期の遅閉じ範囲から早閉じ範囲への移行中にスロットル弁を絞る場合に、開き気味のスロットル弁開度に設定することができるようにして、ポンプ損失を出来る限り低減する。
【解決手段】機関運転状態が第1運転領域から第2運転領域へ移行するときに、吸気弁の閉弁時期が遅閉じ範囲から早閉じ範囲へ移行し且つスロットル弁が一時的に閉方向に作動する運転領域移行動作が生じるようにするとともに、動力伝達装置による機関速度低下動作(シフトアップ)の要求が有ると判定したとき(ステップS73の判定がYESであるとき)において、前記運転領域移行動作終了の判定がなされている場合(ステップS74の判定がNOである場合)に、機関速度が低下するように動力伝達装置を制御する(ステップS75)。
(もっと読む)
車両の制御装置

【課題】吸入空気量を増大させてF/Cを行っていた状態から復帰する場合におけるショックを防止することできる制御装置を提供する。
【解決手段】燃料が供給されずに回転している状態における吸入空気量の増大に応じて動力損失が低減するエンジンの出力側に変速比が連続的に変化する変速機が連結され、減速時のエンジン回転数が予め定めた復帰回転数以上の場合に前記エンジンに対する燃料の供給を停止し、かつ燃料の供給を停止している減速時の車速の低下に伴って前記変速比を増大させ、その変速比の増大に応じて前記吸入空気量を増大させる車両の制御装置において、前記エンジンに対する燃料の供給を再開する場合に、前記増大させた吸入空気量を減少させる制御(ステップS14)を行うように構成されている。
(もっと読む)
ハイブリッド車両の制御装置
【課題】エンジン停止制御時、差動許容機構を有さない直列接続駆動系でありながら、エンジン再始動時の排気浄化効率の維持と、車速低下の抑制と、燃費の向上と、を併せて達成すること。
【解決手段】駆動系に、エンジンEng、第1クラッチCL1、モータ/ジェネレータMG、第2クラッチCL2、左右タイヤLT,RTを備え、エンジンEngを停止させる際、第1クラッチCL1を締結状態でエンジンEngへの燃料噴射を継続したままでエンジン回転数を低下させ、エンジン回転数N1が所定回転数N2まで低下した段階でエンジンEngへの燃料噴射を停止する。このハイブリッド車両において、エンジン停止制御手段(図4,図5)は、モータ/ジェネレータMGによりエンジン回転数N1を低下させるとともに、第2クラッチCL2をスリップ締結状態とする。
(もっと読む)
車両の制御装置
【課題】駆動輪がスキッドしたと判定されるとき、駆動源の出力トルクの変動を低減して車両の挙動を安定させるようにした車両の制御装置を提供する。
【解決手段】車両に搭載されたエンジンの出力を変速してドライブシャフを介して駆動輪に伝達する自動変速機を備えた車両において、車輪速センサの出力に基づいて駆動輪がスキッドしたか否か判定し(S10)、駆動輪がスキッドしたと判定されるとき、ドライブトレーンから出力される駆動源の出力トルクを算出し、それから予想される車両の第1の走行加速度G1を算出すると共に、車輪速センサの出力に基づいて駆動輪の回転速度から予想される車両の第2の走行加速度G2を算出し(S12からS20)、算出された第1、第2の走行加速度G1,G2に基づいて出力トルクの余剰トルクを算出し(S24)、算出された余剰トルクを除去する(S26からS38)。
(もっと読む)
先行車追従制御装置および先行車追従制御方法
【課題】 ドライバのブレーキ操作による目標車間距離の変更に伴う車両挙動変化を抑制でき、ドライバに与える違和感を軽減できる先行車追従制御装置および先行車追従制御方法を提供する。
【解決手段】 先行車追従制御装置は、ドライバのブレーキ操作量を検出するブレーキ操作量検出センサ4と、追従制御中に所定量以下のブレーキ操作量が検出された場合、エンジンブレーキによる減速度以下の減速度を発生させる追従制御装置5とを備える。
(もっと読む)
車両制振制御装置
【課題】適正に制振制御を実行することができる車両制振制御装置を提供することを目的とする。
【解決手段】車両10に搭載された動力源21を制御し車両10のバネ上振動を抑制する制振制御を実行する車両制振制御装置1において、動力源21の運転領域に応じて制振制御の態様を変えることを特徴とする。したがって、車両制振制御装置1は、動力源21の運転領域に応じて制振制御の態様を変えることで、例えば、制振制御と動力源21に関する他の制御との協調を図ることができ、適正に制振制御を実行することができる。
(もっと読む)
車両制御装置
【課題】 運転者にとってより自然な軌跡を求めることができる車両制御装置を提供する。
【解決手段】 カーブ路における車両の目標走行軌跡を最適化手法に基づいて求める車両制御装置において、そのカーブ路中で目標走行軌跡がカーブ路のレーン内側ラインに最も近接する最近接位置(C/P)がカーブ路通過時間を最短化する場合の最近接位置(C/P)よりカーブ路出口側へ位置させる条件を付加する、具体的には、評価関数にC/Pが後方側へと位置する条件を付加して所望の目標走行軌跡を求める。
(もっと読む)
車両の制御装置
【課題】 複数のクラッチを備える変速機構のシフトダウン制御を適切に行い、機関回転数の過剰な増加及びトルクショックを回避しつつ、迅速なシフトダウンを行うことができる車両の制御装置を提供する。
【解決手段】 例外制御選択条件が成立しないときは、クラッチトルクTRQCLに、エンジン回転数制御トルクTRQNEを加算することにより、目標トルクTRQCMDを算出し(S15)、例外制御選択条件が成立し、かつ第1シフトダウンモードが選択されているときは、目標トルクTRQCMDをエンジン回転数制御トルクTRQNEに設定し(S18)、例外制御実行条件が成立し、かつ第2シフトダウンモードが選択されているときは、ドライバ要求トルクTRQDRVにエンジン回転数制御トルクTRQNEを加算することにより、目標トルクTRQCMDを算出する(ステップS17)。
(もっと読む)
車両の駆動制御装置
【課題】クルーズコントロールの制御時にも簡単な演算処理により通常制御時と同じ内容の制御入力を通常制御時と同じ制御系の同じ位置(最上流位置)に入力してエンジンのスロットル開度の制御およびトランスミッションの変速制御を行なう。
【解決手段】クルーズコントロールの制御時、擬似アクセルペダル開度演算部93により、目標出力演算部92の目標出力P*に対応する擬似アクセルペダル開度θa*を、特性マップG1、G2と、車速センサ3の検出車速Vとに基づき、目標トルクと回転数の積が目標出力P*となるアクセルペダル開度から逆引き演算して簡単に算出する。さらに、スイッチ8により、制御入力としてのアクセルペダルの開度を、検出アクセルペダル開度θaから擬似アクセルペダル開度θa*に切替え、擬似アクセルペダル開度θa*と検出車速Vとに基づく目標スロットル開度θt*にしたがってエンジンスロットル6を制御する。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に望ましくない車両の走行状態を回避することで走行安全性の向上を図る。
【解決手段】車両の走行状態に基づいてドライバにとって望ましくない領域、即ち、ジレンマゾーンへの車両の進入を予測する車両進入予測手段(車両走行状態検出手段)と、ドライバにとって望ましくない領域への車両の進入を回避するように出力を調整する出力調整手段とを設ける。
(もっと読む)
車両の走行制御装置
【課題】ブレーキが不作動状態となった後に、クリープ走行のための駆動力を車両に与えても、ブレーキが不作動状態となった瞬間には、走行路の勾配によって、車両の進行方向とは逆の方向に加速度が発生することがある。
【解決手段】車両が停止状態に保持されている間に、乗員による発進操作が検出された場合には、走行路について取得された勾配に基づいて、該走行路上で車両の移動を抑制する目標駆動力を算出する。目標駆動力による車両の駆動が行われた後に、車両の停止状態の保持を解除するよう制動力を解除する。好ましくは、制動力の解除が終了するまで、目標駆動力による駆動状態を維持する。制動力の解除が終了したならば、駆動力を増加させて車両を発進させる。このような発進制御により、車両が進行方向とは逆方向に一時的に移動するのが防止され、スムーズな発進を実現することができる。
(もっと読む)
キックダウン制御装置
【課題】高出力駆動源を備えた車両においてキックダウン動作時の車両の操作性を向上させることができるキックダウン制御装置を提供する。
【解決手段】アクセルペダル開度センサ102により検出されるアクセルペダル開度APATおよび車速センサ103により検出される車速Nvに基づいて、キックダウン判定手段12がキックダウン動作を行うべきと判定すると、タイマ13により所定時間を計時している間、シフト制御手段15は、現在設定されているギヤ段(変速段)から目標ギヤ段へダウンシフトをするように、自動変速機2を制御し、出力制限手段16は、エンジン1の出力トルクを所定トルク(制限トルク)だけ下げるように制限する。所定時間経過後は、出力制限手段16は、制限トルク分だけ下げられた出力トルクを目標トルクに徐々に上げていく。
(もっと読む)
車両走行制御装置
【課題】車両走行制御装置において、適正な走行支援を行うことでドライバの負担を軽減すると共に違和感の少ない支援を行うことでドライバビリティの向上を図る。
【解決手段】車両に作用する力を調整して車両の走行を制御可能に構成し、車両の走行状態に応じて車両に作用する力を調整する作用力調整手段と、ドライバが車両の走行を操作する操作部材の操作状態を検出する操作状態検出手段と、操作部材の操作状態に応じて作用力調整手段による調整度合を変更する調整度合変更手段とを設ける。
(もっと読む)
車両用追従走行制御装置
【課題】 車両用追従走行制御装置において、自車が先行車の発進に追従して自動的に発進する機能を備えていると運転者が誤認するのを防止する。
【解決手段】 停止した先行車Vbに追従して停止しようとした自車Vaの減速中に先行車Vbが発進した場合、自車Vaが先行車Vbに追従してそのまま加速すると、運転者は自車が自動発進機能を備えていると誤認する可能性がある。そこで先行車Vbの停止位置に仮想先行車Vb′を設定することで、実際の先行車Vbが発進した場合でも、停止中の仮想先行車Vb′に追従して自車Vaを一旦停止させる。その結果、運転者が発進スイッチを操作して発進意思を示すまで自車Vaは発進することがなくなり、自車が自動発進機能を備えていると運転者が誤認するのを防止することができる。
(もっと読む)
走行支援装置
【課題】自動走行とドライバの操作に基づいて走行を行う手動走行との切換を適切に行うことが可能な走行支援装置を提供する。
【解決手段】走行支援装置1は、ドライバの操作に基づいて走行を行う手動走行と、自動制御により走行を行う自動走行とを切換可能な車両の走行支援装置であって、車両をあらかじめ入力された目的地まで自動走行させる。走行支援装置1は、自動走行の起動からの経過時間に従って自動走行の解除方法が異なる運転制御部を備えている。
(もっと読む)
車両の走行安全装置
【課題】運転者が安全装置の作動に煩わしさを感じてしまうことを防止しつつ、適切なタイミングで安全装置を作動させる。
【解決手段】車両の走行安全装置10は、所定の接触判定条件に基づき自車両と物体との接触に係る判定を行なう接触判定部24と、接触判定部24の判定結果に応じて接触回避の支援動作を作動させる車両制御部25と、物体検知部21により検知された物体の形状に基づき、自車両の走行路に接続される接続路の状態を判定する接続路判定部22と、自車両の走行路と接続路との接続部付近の見通しの良否を判定する見通し判定部23とを備え、接触判定部24は、接続路の幅が所定閾値以下であって、かつ、接続路の手前位置に検知された路側物により接続部付近の見通しが悪いと判定された場合に、接触回避の支援動作が作動し易くなるようにして接触判定条件を変更する。
(もっと読む)
車両用走行制御装置
【課題】追従走行制御に運転者が違和感を感じてしまうことを防止する。
【解決手段】車両用走行制御装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ24と、自車両の車速を検出する車速センサ21と、車速に基づいて目標車間距離を設定する目標車間距離算出部31および目標車間距離設定部33と、車間距離センサ24により検出された車間距離が目標車間距離に等しくなるように走行制御を行なうと共に、先行車両の停止に追従して自車両を停止させる走行制御部35と、自車両の走行路の勾配を取得する勾配取得部32とを備え、目標車間距離設定部33は、勾配取得部32により取得された勾配と車速センサ21により検出された車速とに基づき、目標車間距離を設定する。
(もっと読む)
作業車の走行制御装置
【課題】本発明は、トロイダル変速機構を搭載した作業車で、変速比を一定にして走行を維持する定車速モードで走行している場合に、旋回操作を行えば急激な走行速度の低下を防止して速やかな旋回を行わせ、作業能率を低下させない作業車を提供することが課題である。
【解決手段】エンジンEが適宜回転数でトロイダル変速機構4の変速比を一定に固定して走行する定車速モードと左右走行装置8の旋回角を検出する旋回角検出手段130を設け、設定速度を定速度T1に設定して定車速モードで走行中に旋回を行うときにおいて、旋回内側のブレーキ作動が始まる直前の前旋回角αで設定速度を増速度T2に変更し、旋回内側のブレーキ作動が終了する直前の終旋回角βで設定速度を元の定速度T1に変更するように制御してなる作業車の走行制御装置の構成とする。
(もっと読む)
車両の走行制御装置
【課題】 現在普及している車両にすぐにでも適用でき、緊急地震速報を受信したときに適切な車両走行制御を行い、緊急地震速報によって生じることが懸念されているパニックを抑制することができる、車両の走行制御装置を提供する。
【解決手段】 緊急地震速報を受信し、地震対応制御を行う場合において、アクセルペダル操作量APが増加するときは、その増加方向の変化量が減少する(増加速度が減少する)ようにアクセルペダル操作量APが補正され、補正アクセルペダル操作量APCが算出される。補正アクセルペダル操作量APCに応じてエンジンのスロットル弁開度を制御するスロットルアクチュエータ31の駆動制御が行われる。ブレーキペダル操作量BP及びステアリングホイールの操舵角STについても、ほぼ同様の処理により補正ブレーキペダル操作量BPC及び補正操舵角STCが算出される。
(もっと読む)
車両の制御装置および制御方法
【課題】補機の作動開始時の車両の加速および燃費の悪化を抑制する。
【解決手段】ECUは、定常走行中であって(S100にてYES)、補機作動中に(S102にてYES)、ガード値Eを設定するステップ(S104)と、今回のスイープアップ量SWP(I)を算出するステップ(S106)と、SWP(I)がガード値Eよりも小さい場合に(S108にてNO)、SWP(I)を最終的なスイープアップ量SWPとして更新するステップ(S110)と、SWP(I)がガード値以上である場合(S108にてYES)、ガード値Eを最終的なスイープアップ量SWPとして更新するステップ(S112)と、第3の要求量を算出するステップ(S114)と、算出された第3の要求量に基づいてCVTを制御するステップ(S116)とを含む、プログラムを実行する。
(もっと読む)
61 - 80 / 483
[ Back to top ]