
Fターム[3D041AE04]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 推進装置 (2,853) | スロットル弁開度 (515)
Fターム[3D041AE04]の下位に属するFターム
空気吸入量、吸気管負圧 (32)
Fターム[3D041AE04]に分類される特許
41 - 60 / 483
追従走行制御装置
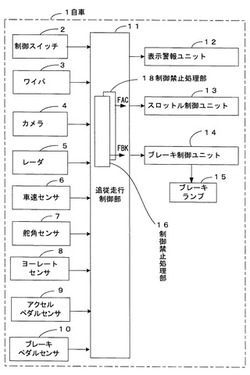
【課題】交通の流れの妨げや渋滞の原因等になる可能性を回避して、運転者の感覚に近いタイミングで追従走行制御の減速や加速が行なえるようにする。
【解決手段】追従走行制御部11の制御禁止処理部16により、追従走行制御中に走行状況が変化して実車間距離が目標車間距離に対してずれたときに追従走行制御を一旦禁止し、走行状況に応じて変化する禁止時間が経過した後に前記禁止を解除して追従走行制御を再開することにより、例えばブレーキが作動する減速制御の場合に、直ちに減速するのでなく、運転者のブレーキ操作に即するように禁止時間の「間」をおいて運転者に違和感を与えることなく減速を開始し、その間の走行状況の変化によってブレーキ操作の回数を減少し、また、禁止時間にはブレーキランプを点灯しないため、自車のブレーキランプの点灯に応動して後続車が次々とブレーキをかける事態の発生を防止する。
(もっと読む)
車両用駆動装置の制御装置

【課題】コースト走行中のダウンシフトに際して車両の減速度を速やかに得ることができる車両用駆動装置を提供する。
【解決手段】マニュアルパワーオフダウンシフトに際して、エンジン回転速度NEを一時的に上昇させるブリッピング制御手段70と、ブリッピング制御開始後に減少する入出力回転速度差△Nに基づいて、ロックアップクラッチ26を係合または半係合させるロックアップ制御手段72とを含むことから、タービン回転速度NTとエンジン回転速度NEとの差がロックアップ制御またはロックアップスリップ制御を安定に実行することができる値すなわち所定値Aよりも小さくされて上記各制御が安定に実行され、エンジンが非駆動状態となって十分なエンジンブレーキが得られるので、コースト走行中のダウンシフトに際して車両の減速度を速やかに得ることができる。
(もっと読む)
パワートレイン制御装置
【課題】油圧制御部に異常が発生し、変速比が大きくなって機関回転速度が上昇してしまったときに、変速比を小さくして内燃機関の過回転を抑制することのできるパワートレイン制御装置を提供する。
【解決手段】電子制御装置300は、第1制御バルブ217と、第2制御バルブ218と、フェールセーフバルブ219とを備える油圧制御部200を操作して無段変速機100における変速比を制御するとともに、内燃機関400のトルクを制御する。電子制御装置300は、第1制御バルブ217を通じて第1プーリ130に適切な量の作動油を供給することができなくなったときに、内燃機関400のトルクを低下させつつ、第2プーリ150における油圧を低下させるとともに、フェールセーフバルブ219を操作して第2制御バルブ218を通じて制御された作動油を第1プーリ130にも供給するように作動油の供給経路を切り替える過回転抑制制御を実行する。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、変速操作のためにクラッチの切断操作等が行われたときに、エンジン回転数が吹き上がることを防止する。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつオートクルーズ制御手段が備えられた車両において、前記オートクルーズ制御手段によるオートクルーズ制御中に、クラッチの切断操作等の動力遮断操作が行われたときに、該操作の直前の状態から手動変速機の変速段を一段シフトアップさせたときのエンジン回転数を目標回転数に設定し、この目標回転数に一致するようにエンジン回転数を制御するエンジン制御手段を備える。
(もっと読む)
車両の走行制御装置
【課題】手動変速機を搭載した車両において、オートクルーズ制御の実行中に、前記変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときのブレーキ制御を運転者の要求に適合させるように行うことを課題とする。
【解決手段】エンジン出力がクラッチと手動変速機とを介して駆動輪側へ伝達されるように構成され、かつエンジンの駆動制御とブレーキの制動制御とでオートクルーズ制御を行う車両において、前記制動制御が行われている状態で、エンジンから駆動輪への動力伝達を遮断する動力遮断操作が行われ、この状態で前記手動変速機のシフトダウン操作とアクセルペダルの踏み込み操作とが行われたときに、該アクセルペダルの踏み込み量が所定値より大きいときは前記制動制御を解除し、該アクセルペダルの踏み込み量が前記所定値より大きくないときは前記制動制御を継続する制動制御手段を備える。
(もっと読む)
制駆動力制御装置
【課題】車両がコーナを脱出する際のエンジンブレーキや回生ブレーキ等による無駄な減速を抑制し、なおかつ想定以上に下がってしまった車速を回復する際の無駄なエネルギー消費を抑制するために、車両の減速度を徐減することができる制駆動力制御装置を提供することを課題とする。
【解決手段】ECUは、車両のカーブ脱出時に、車両の非旋回時用に設定された減速度である非旋回減速度より小さくなるまで、車両の減速度を減少させる。
(もっと読む)
車両の制振制御装置
【課題】 駆動出力制御による制振制御に於いて、エンジンのスロットル弁の可動部の摩耗などの特性の変化を管理し、その過度な進行を回避すること。
【解決手段】 本発明の車両の駆動出力を制御してピッチ又はバウンス振動を抑制する制振制御装置であって、車両の車輪と路面との接地個所に於いて発生する車輪トルクに基づいてピッチ又はバウンス振動振幅を抑制するようエンジンの駆動トルクを制御する制振制御部と、エンジンのスロットル弁の可動部の摩耗状態量などの特性の変化に基づいて、制振制御部により算出される制振制御のための車輪トルクを補償する補償成分の大きさを変更する補償成分調節部とを含み、スロットル弁可動部の特性の変化の過度な進行を抑制する機能を有する。また、車両の走行中に、スロットル弁可動部の特性の変化状態を推定する新規な構成が提供される。
(もっと読む)
車両制御装置
【課題】よりドライバーの心理状態を反映したエコ運転及び快適を実現しることができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、ドライバーの笑顔状態を含む心理状態を推定する推定手段201aと、推定手段201aにより推定された心理状態が笑顔状態である場合に、車両の制御内容を省燃費及び快適に対応させて変更する変更手段202bとを含むことを特徴とする。
(もっと読む)
車両の制御装置
【課題】故障時の車両加速を確実に防止し、且つ、故障検出信頼性向上、開発コスト削減の要求も満たす。
【解決手段】車両暴走に至る可能性のある故障が検出されたときに、エンジン11から車軸へのトルク伝達をカットして、故障時の車両加速を防止しながら車両を惰性走行させる。トルク伝達がカットされている期間にフェイルセーフ処理に移行すべき故障が発生しているか否かを判定し、当該故障が発生していると判定されれば、フェイルセーフ処理に移行してエンジン11の出力トルクを抑制した後にトルク伝達手段をトルク伝達可能な状態に戻してエンジン11の出力トルクを抑制して退避走行を可能とする。
(もっと読む)
車両制御システムおよび車両制御方法
【課題】運転者のアクセル操作量に対する最適な要求値を決定することにより、運転者の感性に即した加速を十分に実現しつつ、ドライバビリティの悪化を抑制することができる車両制御システムおよび車両制御方法を提案すること。
【解決手段】車両制御システムは、車両に加速度を発生する加速度発生装置(エンジン、T/M)と、運転者によるアクセルの操作に応じたアクセル開度Paと、車両の車速vとに基づいて加速度発生装置を制御する車両制御装置とを備える。アクセル開度Paと要求加速度Gxとの関係は、加速度発生装置により発生可能な加速度である最小発生加速度Gxminに基づいて所定の特性を維持しつつ変更される。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
車両の速度制御装置
【課題】降坂時にて、指示車速に基づいて車速を調整しつつ旋回性能を確保し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、実車速Vxaと指示車速Vxtとの比較結果に基づいて各車輪の基準制動トルクPwr(Pws)[**]が演算される。通常、各車輪の制動トルクが対応する車輪の基準制動トルクに一致するように調整される。下り坂の勾配Kdwが所定値kd1以上、且つ、操舵角Saaが所定値sa1以上のとき、旋回外側車輪の制動トルクが対応する車輪の基準制動トルクより小さく、且つ、旋回内側車輪の制動トルクが対応する車輪の基準制動トルクより大きくなるように調整される。これにより、内外輪間で制動トルク差が付与される。この制動トルク差に基づいて車両にヨーモーメントが与えられる。この結果、車両の旋回性能(回頭性、操舵追従性)が確保され得る。
(もっと読む)
動力伝達装置
【課題】回転子同士の電磁気結合によるトルクを利用して動力伝達が行われる状態から、係合装置の係合により動力伝達が行われる状態への移行を、駆動トルクの低下を抑えながら円滑に行う。
【解決手段】電子制御ユニット50は、入力側ロータ28と出力側ロータ18との間に作用するトルクによりエンジン36から駆動軸37への動力伝達が行われる状態から、クラッチ48の係合によりエンジン36から駆動軸37への動力伝達が行われる状態に移行する場合に、入力側ロータ28の回転速度が出力側ロータ18の回転速度に近づくようにエンジン36の回転速度を制御しつつ、蓄電装置42からの直流電力をインバータ40で交流に変換してステータ巻線20へ供給することでステータ16と出力側ロータ18との間にトルクを作用させるようにインバータ40で行われる電力変換を制御する。
(もっと読む)
船外機の制御装置
【課題】変速機を備え、加速時に変速するときの内燃機関の動作を適切に制御して機関回転の吹き上がりを防止すると共に、加速直後における加速性能を向上させるようにした船外機の制御装置を提供する。
【解決手段】変速機を備える船外機の制御装置において、内燃機関の機関回転数NEが目標機関回転数NEaとなるようにスロットルバルブを開閉するアクチュエータ(スロットル用電動モータ)の駆動を制御し、変速機で2速が選択されているとき、内燃機関に対して加速が指示されたか否か判定し(S30)、加速が指示されたと判定されるとき、2速から1速に変速するように変速機の動作を制御し(S46)、2速から1速に変速された後、内燃機関の出力トルクが最大となるように目標機関回転数NEaを変更する(S48)。
(もっと読む)
車両の走行安全制御装置
【課題】アクセル全開時において、適切に自動ブレーキ制御の開始を運転者に知らせるとともに、アクセル操作による自動ブレーキ制御解除を可能とすることで、より走行安全性を向上させることのできる車両の走行安全制御装置を提供すること。
【解決手段】衝突予測時間が所定時間以内という条件が成立したとき、まず警告を発し(S1)、このときアクセル全開状態であるときにはアクセル反力を発生させ(S3)、当該アクセル反力に抗してアクセルペダルが踏み込まれた場合には(S4,S6)、自動ブレーキ制御及び警告を解除する(S8)。
(もっと読む)
車両制御装置
【課題】運転者の違和感を低減してドライバビリティを向上させる。
【解決手段】本発明の車両の制御装置40は、運転者により所定の加減速操作がなされているか否かを判定する加減速判定部61と、動力伝達経路のうち遊びのある係合部分36a,37aに対して動力伝達上流側にある入力軸24と、係合部分36a,37aに対して動力伝達下流側にある出力軸28との相対回転位置X及び相対回転速度Vの少なくとも一方の値を検出する動力伝達状態検出部62と、加減速判定部61により前記加減速操作がなされていると判定された場合には、動力伝達状態検出部62により検出された値に応じて、動力伝達部材36,37間の接触速度及び伝達トルクの少なくとも一方が小さくなるように入力軸24又は出力軸28を加減速させる加減速制御を実行する加減速制御部63とを備えている。
(もっと読む)
走行支援装置
【課題】死角がある場合に適切な適正車速を設定する走行支援装置を提供することを課題とする。
【解決手段】車両に搭載される走行支援装置であって、車両前方の死角領域を検出する死角領域検出手段と、死角領域検出手段で検出した死角領域を減少する走行領域を検出する走行領域検出手段と、走行領域検出手段で検出した走行領域での適正車速を設定する適正車速設定手段を備えることを特徴とし、適正車速設定手段は、周辺環境に応じて適正車速を変更すると好適である。
(もっと読む)
走行支援装置
【課題】追従走行制御を行う際、自車両の無駄な加減速を低減し、燃費を向上させる。
【解決手段】走行支援装置は、先行車両の走行状態と先先行車両の走行状態とに基づいて、先行車両と先先行車両との間の車間距離が拡大傾向である否かを判定し、車間距離が拡大傾向であると判定した場合には、自車両の車両速度が先行車両の車両速度よりも高くなるように、自車両の加減速度を制御する制御手段(10)を備える。
(もっと読む)
走行制御装置
【課題】レーダ装置の発熱および劣化が生じることを的確に抑制する。
【解決手段】走行制御装置10は、先行車両に対する追従走行と渋滞追従走行とを制御する制御ステート決定部34と、追従走行の実行時に自車両の進行方向に向けて発信する電磁波の出力を増大させる出力増大モードを実行し、かつ出力増大モードよりも電磁波の出力を低減させる出力低減モードを所定時間間隔毎に一時的に出力増大モードから切り替えて実行し、渋滞追従走行の実行時には、出力低減モードを実行する発信部11aと、追従走行の実行時に、出力増大モードの反射波の反射レベルと出力低減モードの反射波の反射レベルとの比較結果に基づき、出力増大モードと出力低減モードとの切り替えの異常の有無を判定する切替異常判定部36とを備え、制御ステート決定部34は、切替異常判定部36の判定結果において異常が有る場合に渋滞追従動作の実行を禁止する。
(もっと読む)
車両運転支援装置及び車両運転支援方法
【課題】運転者に与える違和感を低減しつつ、側方障害物に対する支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供する。
【解決手段】自車両の車線幅方向横位置が予め設定した自車両に対する接近防止の指標となる車線幅方向横位置である制御開始位置となった場合、制御開始と判定して自車走行車線の中央側へ向かうヨーモーメントを自車両に付与して自車両を制御する。そして、自車両の車線幅方向横位置が前記制御開始位置の外側から内側に移動した場合、予め設定した制御状態保持時間が経過するまでの間、前記制御開始の判定を前記制御開始位置の内側に移動する前と比較して抑制する。
(もっと読む)
41 - 60 / 483
[ Back to top ]