
Fターム[3D041AE12]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 推進装置 (2,853) | アクセルペダル、レバー (167)
Fターム[3D041AE12]に分類される特許
1 - 20 / 167
変速制御装置
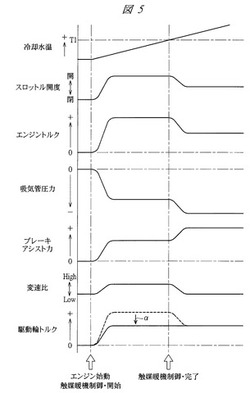
【課題】点火時期の遅角化によって触媒を暖機する際に、運転手に違和感を与えることなく、スロットルバルブを開側に制御する。
【解決手段】エンジン始動後の冷却水温が所定値T1を下回る場合に、点火時期を遅角側に制御する触媒暖機制御が開始される。この触媒暖機制御によるエンジントルク低下に合わせて、スロットルバルブが開側に制御されてエンジントルクが引き上げられる。このようにスロットルバルブが開かれることから、触媒暖機制御においては、吸気管圧力が上昇して倍力機構のブレーキアシスト力が低下する。このため、無段変速機の変速比を高速側にアップシフトさせて駆動輪トルクを低下させる。このように、触媒暖機制御に伴ってエンジントルクが上昇するとともにブレーキアシスト力が低下した場合であっても、アップシフトによって駆動輪トルクの上昇を回避することができ、運転手の意図しない車両発進を防止することが可能となる。
(もっと読む)
車両および車両用制御方法

【課題】走行路面の誤判定を抑制して、走行路面に応じた駆動力制御を実現する。
【解決手段】ECUは、バンドパスフィルタ処理を実行するステップ(S102)と、積算値算出処理を実行するステップ(S104)と、ローパスフィルタ処理を実行するステップ(S106)と、所定時間毎に今回の第2フィルタ出力値と前回の第2フィルタ出力値との差がしきい値α以上であるか否かを判定するステップ(S114)と、今回の第2フィルタ出力値と前回の第2フィルタ出力値との差がしきい値α以上である場合に(S114にてYES)、増加カウント値Ciに「1」を加算するステップ(S116)と、第2フィルタ出力値Fo2がβ以上であって、かつ、増加カウント値Ciがγ以上である場合に(S122にてYES)、駆動力の制限制御を実行するステップ(S124)とを含む、プログラムを実行する。
(もっと読む)
自動制動装置
【課題】運転者の加速意図に応じて、迅速に自動ブレーキの解除が可能な自動制動装置1を提供する。
【解決手段】運転者のブレーキペダル操作に依存しない制動力を自動的に発生させる自動制動装置1において、運転者のアクセルペダル操作により、発生していた制動力を減衰係数に応じて減衰させ解除する制御を行う制御手段2と、アクセルペダル操作に基づいて、車両を加速させようとする運転者の加速意図の程度を検出する加速意図検出手段8とを有し、制御手段2は、加速意図の程度に応じて減衰係数を減少させることで、制動力を速く減衰させ解除する。加速意図検出手段8が、アクセルペダル19の開度と、踏込速度と、踏込加速度の中の少なくとも1つが所定値以上であると判定した場合に、制御手段2は、減衰係数を減少させる。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、ワンウェイクラッチが係合ロック状態のときクラッチスリップを維持しつつ、ワンウェイクラッチが係合ロック解除状態から再び係合ロック状態に移行した際に車両挙動の急変を防止すること。
【解決手段】ハイブリッド車両はエンジンおよびモータジェネレータ、第2クラッチおよびワンウェイクラッチを備え、制御装置は目標CL2トルク容量演算部404を有するクラッチ動作制御手段、を備え、目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、ワンウェイクラッチが係合ロック解除状態であると検出されたとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御の実施を停止する。
(もっと読む)
ハイブリッド車両の制御装置
【課題】クラッチスリップ制御中、目標駆動トルクが所定値を超える領域でのクラッチスリップを維持しつつ、目標駆動トルクが所定値以下のときに駆動輪への駆動トルク伝達を確保すること。
【解決手段】ハイブリッド車両の制御装置は、エンジンおよびモータジェネレータと、第2クラッチと、目標CL2トルク容量演算部404を有するクラッチ動作制御手段と、を備える。目標CL2トルク容量演算部404は、第2クラッチへのスリップ要求時、目標入力軸回転数ωCL2i*より実入力軸回転数ωCL2iが低いとき、入力軸回転数偏差(ωCL2i*−ωCL2i)を無くすように第2クラッチの目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を実施する。そして、第2クラッチのスリップ制御中、目標駆動トルクTd*がクリープトルク以下のとき、目標CL2トルク容量TCL2*を減少補正する入力軸回転数F/B制御を停止する。
(もっと読む)
車両制御装置
【課題】見通しの悪いブラインドコーナーにおいて、適切な低燃費速度パターンを生成する車両制御装置を提供する。
【解決手段】本発明に係る車両制御ECU2(車両制御装置)は、車両1がこれから走行する走行経路に関する情報である目標走行経路情報を取得する目標走行経路情報取得部21と、目標走行経路情報に基づいて進行方向の見通し距離を算出する見通し距離算出部22と、見通し距離に基づいて上限速度を設定する上限速度設定部23と、上限速度に基づいて速度パターンを生成する速度パターン生成部24と、を備える。
(もっと読む)
車両の補助制動装置
【課題】補助制動装置が作動中でもアクセルペダルの踏み込み量に応じた制動力が得られ、頻繁な加速・減速の繰り返しを防止して、省燃費運転を実現する車両の補助制動装置の提供。
【解決手段】車両電子制御ユニット(10)及びその他の電子制御ユニット(20、30)を有し、車両電子制御ユニット(10)とその他の電子制御ユニットは車両内通信システム(L123)により接続されており、補助制動スィッチ(5)のスイッチ位置を検出する補助制動スイッチ位置検出装置(5S)と、アクセルペダル(4)の踏み込み量を計測するアクセルペダル踏み込み量計測装置(4S)を有している。
(もっと読む)
車両制御装置
【課題】ブレーキ温度の上昇をより効率良く抑制することが可能な車両制御装置を提供する。
【解決手段】本実施形態の車両制御装置1において、車両の駆動力を制限するECU20及びアクセルアクチュエータ32は、車速センサ14が検出した車両が制動を開始する時の車速である制動開始車速Vに基づいて、車両の駆動力を制限する制限率を変更する。このため、車両が加速、制動、加速、制動を繰り返して走行する際に、制動開始の車速が変動したとしても、制動開始の車速に応じて駆動力が制限され、ブレーキ温度の上昇を効率良く抑制することができる。
(もっと読む)
車両用駆動力制御装置
【課題】 走行用駆動源の出力を微量とした状態で車両を移動させるための車両用駆動力制御装置を提供する。
【解決手段】 微量出力モードが選択されていると判定され、かつ、ブレーキペダルが操作されたと判定されたときに、車両を移動させるために必要とする出力(必要出力)を決定し、エンジンの出力が必要出力となるようにエンジンを自動制御する微量出力モードを実行するので、エンジンの出力を微量とした状態で車両を移動させることができる。
(もっと読む)
車両用制御装置
【課題】自動変速機により、アップシフトが行われている際に、ドライバからの制動要求があった場合に、制動要求に応じた制動力を適切に発生させることのできる車両用制御装置を提供すること。
【解決手段】モータジェネレータ20と、前記モータジェネレータと駆動輪54との間に介装され、締結要素の締結解放により複数の変速段を達成する自動変速機40と、摩擦力により制動力を発生する摩擦ブレーキと、を備える車両に対して制御信号を出力する車両用制御装置であって、ドライバからの制動要求に応じて、前記モータジェネレータによる回生制動および前記摩擦ブレーキによる摩擦制動を制御することで、回生協調制御を行う回生協調制御手段と、前記自動変速機により、アップシフトが行われている場合に、前記モータジェネレータによる回生制動を禁止する禁止手段と、を備えることを特徴とする車両用制御装置を提供する。
(もっと読む)
振動付与構造検出装置及び車両制御装置
【課題】車両が振動付与構造に接触することを高精度に検出できる振動付与構造検出装置等を提供する。
【解決手段】コントローラ(1)は、自車両が走行車線から逸脱する可能性である車線逸脱傾向が有るかを判断する車線逸脱判断部(11)と、路面から自車両に入力される振動を検出する振動検出手段(3,14-16)と、検出された振動のうち振幅が予め定められた所定の振幅閾値以上である振動の周波数が所定の周波数範囲である場合に、自車両が走行する走行路外であって走行路の延在方向に沿って設けられ車両に振動を付与する振動付与構造に対して車両の車輪が接触していると判断するランブルストリップス検出部(17,18)と、振幅閾値を設定する周波数閾値設定部(13)とを備え、周波数閾値設定部(13)は、車線逸脱判断部(11)によって車線逸脱傾向が有ると判断されている場合に、車線逸脱傾向が有ると判断されていない時の振幅閾値に比して、振幅閾値を小さい値に設定する。
(もっと読む)
状況適合型運転支援装置
【課題】様々な走行状況に適合した最適な運転支援を行うことができる状況適合型運転支援装置を提供する。
【解決手段】モデルを予測しつつアシスト量最適化問題を逐次解くことにより、最適アシスト量を逐次決定するモデル予測部41と、そのモデル予測部41が決定した最適アシスト量に基づいて、減速アクチュエータ10の制御を行うアクチュエータ制御装置20とを備え、さらに、車両の危険度を判断する危険度判断部42と、その危険度判断部42が判断した危険度に応じて、アシスト量最適化問題に含まれるパラメータを調整するパラメータ調整部43を備える。モデル予測部41は、パラメータ調整部43が調整したパラメータを用いて最適アシスト量を逐次決定する。
(もっと読む)
車両制御システム
【課題】車両の制御における制御目標を適切なものとすることができる車両制御システムを提供すること。
【解決手段】道路上の車両の走行状態に関する情報に基づいて要求される第一の要求加速度acooperateおよび自車両の直前を走行する先行車あるいは自車両の前方の障害物の少なくともいずれか一方と自車両との相対関係に基づいて要求される第二の要求加速度aaccから目標加速度を選択する場合、第一の要求加速度および第二の要求加速度のうち最小の加速度を目標加速度として自車両の加速度を制御する。
(もっと読む)
惰行制御装置
【課題】ドライバーのアクセル操作に応じた惰行制御を行うことができ、ドライバーの不快感を低減可能な惰行制御装置を提供する。
【解決手段】所定の学習開始条件を満たし、かつ、アクセル開度速度が、惰行制御開始条件、あるいは惰行制御終了条件で設定されているしきい値範囲外となったとき、当該アクセル開度速度の大きさに応じて、前記しきい値範囲を拡大するアクセル開度速度学習手段6を備えた。
(もっと読む)
運転支援制御装置
【課題】運転支援制御装置により、走行条件に応じた運転者の嗜好や技量に適応した円滑な車両走行を実現する。
【解決手段】運転支援制御装置において、ユーザ入力により、予め運転支援制御設定が入力される。車速設定入力画面においては、リンク400における設定車速として、たとえば「40km/h」が設定される。条件設定入力画面においては、このリンク400に対する車速設定および条件設定の組合せの有効期間、該組合せの適用対象の時間帯、および該組合せが適用される天候条件および路面状態の条件が各々設定される。運転支援制御設定に従って、車両走行時に車両制御処理が行われる。運転支援制御装置は、設定した条件に基づき設定車速の超過を検出したとき、運転者に減速を促す警告を報知すると共に、ECUに速度超過を通知してスロットル開度の低減等が行われるようにする。
(もっと読む)
自動車運転支援装置および自動車
【課題】大きな力で自動車操縦機器を一定位置または角度で保持する必要がある状況であっても、アクチュエータのエネルギー消費を抑制し、機器の寿命を確保すると共に、装置の小型化を図る。
【解決手段】自動車の運転を支援する自動車運転支援装置であって、駆動力を発生するアクチュエータと、前記アクチュエータが発生した駆動力を一方向にのみ伝達する不可逆機構と、前記不可逆機構から伝達される駆動力を伝達しまたは切断する切り替え機構と、前記駆動力切断機構が前記不可逆機構から伝達される駆動力を伝達するときに、自動車操縦機器へ前記駆動力を伝達する駆動力伝達機構と、を備える。
(もっと読む)
車両制御システム
【課題】燃費の向上を図ることができる車両制御システムを提供すること。
【解決手段】エンジンと、エンジンの出力する動力を車両の駆動輪に伝達する自動変速機とを備え、エンジンの出力トルクと回転数との関係を示す予め定められた所定動作線と、車両の加速度に関する目標値とに基づいてエンジンの目標トルクおよび自動変速機の目標変速比を決定し(54)、かつエンジンに目標トルクを実現させる指令であるトルク指令、あるいは自動変速機に目標変速比を実現させる指令である変速指令の少なくともいずれか一方に遅れ補償を施して出力する(54−56−58A,54−57−58B)ことが可能である。遅れ補償は、出力トルクおよび回転数を示す動作点が目標トルクおよび目標変速比に対応する目標動作点まで変化する過程において、遅れ補償が施されない場合よりも、動作点が所定動作線から離れることを抑制するものである。
(もっと読む)
運転支援装置
【課題】本発明は、リスク回避の確実性の向上が可能な運転支援装置を提供することを目的とする。
【解決手段】運転支援装置1は、車両の運転者に対して、車両の運転におけるリスクの対象となる対象物を回避するために運転支援を実施する装置であって、運転者の視線を検出するドライバ状態検出部4と、運転者が対象物を注視しているか否かを判定する注視判定部13と、各運転支援形態における制御介入度を調整する制御介入度調整部20と、運転支援形態及び調整された制御介入度に基づき、運転支援のための制御を実施する運転支援制御部15とを備え、制御介入度調整部20は、注視判定手段により運転者が対象物を注視していると判定されなかった場合に、注視していると判定された場合と比較して制御介入度を大きくする。
(もっと読む)
車両用駆動装置の制御装置
【課題】コースト走行中のダウンシフトに際して車両の減速度を速やかに得ることができる車両用駆動装置を提供する。
【解決手段】マニュアルパワーオフダウンシフトに際して、エンジン回転速度NEを一時的に上昇させるブリッピング制御手段70と、ブリッピング制御開始後に減少する入出力回転速度差△Nに基づいて、ロックアップクラッチ26を係合または半係合させるロックアップ制御手段72とを含むことから、タービン回転速度NTとエンジン回転速度NEとの差がロックアップ制御またはロックアップスリップ制御を安定に実行することができる値すなわち所定値Aよりも小さくされて上記各制御が安定に実行され、エンジンが非駆動状態となって十分なエンジンブレーキが得られるので、コースト走行中のダウンシフトに際して車両の減速度を速やかに得ることができる。
(もっと読む)
車両の制御装置
【課題】時系列の目標滑り量に基づくロックアップクラッチ13のスリップ制御をする場合でも、ロックアップクラッチ13の温度の過剰な上昇を回避してその信頼性を確保する。
【解決手段】車両の制御装置CRは、アクセル踏み込み操作時に目標加速度を時系列で設定する目標加速度設定部23と、目標加速度に基づきロックアップクラッチ13の作動状態でエンジン11の出力を制御するエンジン出力制御部21と、ロックアップクラッチ13の目標滑り量を時系列で設定する目標滑り量設定部24と、目標滑り量に基づいてロックアップクラッチ13のスリップ制御を実行する変速制御部(スリップ制御手段)22と、設定した目標滑り量に基づくスリップ制御が行われたときのロックアップクラッチ13の到達温度を事前に予測するクラッチ温度予測部25と、を備える。予測到達温度が所定温度よりも高くなるときには滑り量が小さくなるように目標滑り量を変更する。
(もっと読む)
1 - 20 / 167
[ Back to top ]