
Fターム[3D041AE32]の内容
駆動装置の関連制御 (32,328) | 駆動装置の関連制御、制御対象 (6,943) | 駆動装置 (6,172) | 変速 (1,291) | 最適ギヤ段、最適変速比 (935) | シフトチェンジ (247)
Fターム[3D041AE32]の下位に属するFターム
ニュートラルレンジ (26)
オーバードライブレンジ (1)
Fターム[3D041AE32]に分類される特許
1 - 20 / 220
変速制御装置
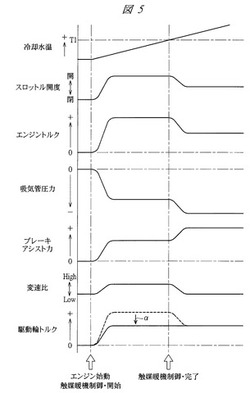
【課題】点火時期の遅角化によって触媒を暖機する際に、運転手に違和感を与えることなく、スロットルバルブを開側に制御する。
【解決手段】エンジン始動後の冷却水温が所定値T1を下回る場合に、点火時期を遅角側に制御する触媒暖機制御が開始される。この触媒暖機制御によるエンジントルク低下に合わせて、スロットルバルブが開側に制御されてエンジントルクが引き上げられる。このようにスロットルバルブが開かれることから、触媒暖機制御においては、吸気管圧力が上昇して倍力機構のブレーキアシスト力が低下する。このため、無段変速機の変速比を高速側にアップシフトさせて駆動輪トルクを低下させる。このように、触媒暖機制御に伴ってエンジントルクが上昇するとともにブレーキアシスト力が低下した場合であっても、アップシフトによって駆動輪トルクの上昇を回避することができ、運転手の意図しない車両発進を防止することが可能となる。
(もっと読む)
車両制御装置

【課題】負荷に応じて圧縮比が可変に制御されるエンジンを搭載した車両において、フューエルカットが実行される場合のドライバビリティの低下を抑制することができる車両制御装置を提供すること。
【解決手段】負荷に応じて圧縮比が可変に制御されるエンジンと、無段変速機と、を備え、アクセルオフに応じてエンジンに対する燃料の供給を停止するフューエルカットが実行される(S2−Y)場合、フューエルカットの開始時にエンジンの圧縮比に基づいて無段変速機の変速比を制御する(S6,S7)。
(もっと読む)
車両の走行制御装置
【課題】最大駆動力の比較的小さい車両であって、走行モードとして複数のモードを有している場合に、各走行モードでの駆動力特性に差を設ける。
【解決手段】運転者が走行モードとしてS(ノーマル)モード或いはI(エコノミー)モードが選択されている場合は、目標駆動力に基づいてエンジン制御と変速制御を行う。一方、走行モードとしてS#(スポーツモード)が選択されている場合、エンジン制御と変速制御とは独立となり、エンジン制御はアクセル開度APとエンジン回転数Neとに基づき、S#モードマップを参照して目標トルクτeを設定し(S12)、この目標トルクτeに対応する目標スロットル開度を設定する(S13)。又、変速制御は車速Vspとスロットル開度SVとに基づき目標変速段を設定する(S31)。
(もっと読む)
車両の駆動力制御装置
【課題】 原動機と電動機とを駆動源として備える車両のHEV走行中において、プレシフトするときの所謂駆動力抜けを防止できる車両の駆動力制御装置を提供する。
【解決手段】 駆動力制御装置は、HEV走行中における奇数段から偶数段へのアップシフトのイナーシャ相t3〜t6中に、モータトルクTeを0にし、第1噛合機構SM1を、前段を確立させるギア列の駆動ギアと第1駆動軸との連結を断つニュートラル状態に切り替えた後、次段よりも変速比の小さい変速段を確立させるギア列の駆動ギアと第1駆動軸とを連結させる状態に切り替える。そして、第2クラッチトルクTc2をエンジンのイナーシャトルクが伝達されるようにTQ1からTQ4に上昇させ、0となったモータトルクTe分のトルクを補填する。
(もっと読む)
車両の統合制御装置
【課題】たとえ、アクセル操作に対してエンジンに発生させる駆動力特性として複数のモードを備えた車両であっても、各モードの違いを十分に発揮しながら、それぞれのモードにおいて最適な燃費を実現する。
【解決手段】統合_ECU22には、エンジン1の複数のモードに応じたそれぞれ異なるエンジンの燃料消費に係る特性(エンジンの燃料消費率マップ)を予め記憶して、予め設定した運転条件が成立する場合に、燃費優先制御を実行すべく、現在選択されているモード(M1、M2、M3の何れか)に対応するエンジンの燃料消費率マップに基づいて、現在のエンジンの運転状態よりも燃費が向上するエンジンの運転状態を選択し、該選択したエンジンの運転状態に基づいて、エンジン1と無段変速機3の少なくとも一方を制御する。
(もっと読む)
オートクルーズ制御装置
【課題】オートクルーズ走行中の車間距離制御において減速を行うとき、適切なタイミングでシフトダウンを行うことで、前走車が加速に移行したときにも円滑に追従することのできるオートクルーズ制御装置を提供すること。
【解決手段】オートクルーズ制御実行中(S1)に車間距離制御(S2)が行われて、減速を行うときは(S4)、目標車速に応じて設定されるオートクルーズ制御用の変速に係る減速時のエンジン回転数閾値よりも高い値である車間距離制御用の減速時のエンジン回転数閾値を用い、エンジン回転数が当該閾値以下である場合(S8)にシフトダウンを実施する(S9)。
(もっと読む)
火花点火内燃機関
【課題】ハイブリッド車両の火花点火内燃機関において、車両減速時にモータ・ジェネレータを発電機として作動させることができないときに、火花点火内燃機関の振動及び騒音の増大を抑制して比較的大きなエンジンブレーキを発生させる。
【解決手段】モータ・ジェネレータと共にハイブリッド車両に組み込まれる火花点火内燃機関において、機械圧縮比可変機構を具備し、車両減速時に前記モータ・ジェネレータを発電機として作動させることができないときには(ステップ102)、自動変速器により機関回転数を高める(ステップ109)と共に機械圧縮比可変機構により実圧縮比を低下させる(ステップ108)。
(もっと読む)
車両の制御装置
【課題】 走行中の車両において惰行による走行時間や走行距離を長く確保できる車両の制御装置を提供すること。
【解決手段】 車両の制御装置は、車両の車速Vが下限側車速V0および上限側車速V1で決定される車速域内にあるとき、車速Vが車速V0以上であればフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させ、車速Vが車速V0を下回ると燃料供給によりエンジンを始動させてクラッチを係合して加速させる(定速フリーラン)。車両を停止させる必要があるときは、車両が停止するまでフューエルカットによりエンジンを停止させてクラッチを開放して惰行により車両を走行させた後(停止フリーラン)、クラッチを係合してエンジンブレーキおよびブレーキ装置による制動を付与する。これにより、惰行による走行時間や走行距離を長く確保できて燃費を向上させることができる。
(もっと読む)
変速制御装置
【課題】アップシフト制御中にアクセル開度が低開度状態に変化した場合でも、入力部材の回転速度を精度良く制御でき、トルクショックが車輪側に伝達されることを抑制する。
【解決手段】回転電機を有する駆動力源に連結される入力部材と、車輪に連結される出力部材と、入力部材の回転速度を各変速段の変速比で変速して出力部材に伝達する変速機構と、を備えた変速装置を制御する変速制御装置であって、解放側の摩擦係合要素の油圧指令を制御する解放側油圧制御部と、駆動力源から出力される駆動力を増加させる駆動力増加制御の指示を行う駆動力増加制御指示部と、アクセル低開度状態である場合に、解放側の摩擦係合要素が解放状態であるか否かを判定する解放判定部と、を備え、解放状態でないと判定された場合に解放側要素の油圧指令を入力部材の回転速度の変化に応じて制御し、解放状態であると判定された場合に駆動力増加制御の指示を行う。
(もっと読む)
車両用定速走行制御装置
【課題】定速走行制御中、駆動力飽和状態でのダウンシフト時におけるシフトショックを抑制しつつ、ダウンシフト後の目標車速への追従性を確保することができる車両用定速走行制御装置を提供する。
【解決手段】車両に搭載されたエンジンの点火タイミングを制御する点火タイミング制御手段と、エンジンのスロットル弁の開度を検出するスロットル開度検出手段と、スロットル開度の所定以上の増加時にダウンシフトさせる変速制御手段と、スロットル開度を制御して車速が目標車速と一致するように車両を定速走行させる定速走行制御手段とを備え、点火タイミング制御手段は、スロットル開度と車速にもとづいて定速走行制御中に駆動力が増加不可となる飽和状態を判定して判定信号を出力する駆動力飽和判定手段と、判定信号にもとづいてダウンシフト実行時に通常のダウンシフト時の遅角補正に対し所定の遅角補正量を加算する点火タイミング補正手段とを備えた構成。
(もっと読む)
車両駆動装置
【課題】ダウンシフト時にダブルクラッチ処理とブリッピング処理とギヤ段変更処理とを協調制御するための制御装置100,200を備える車両駆動装置において、前記ブリッピング処理によって変速機3の入力軸回転数が上昇し過ぎた場合でも、前記ブリッピング処理の後でギヤ入れ処理へ速やかに移行可能にするとともに、ギヤ入れ処理での常時噛み合い式の変速機3に備えるシンクロメッシュ機構34A〜34Cによる回転差吸収量を低減可能にする。
【解決手段】制御装置100,200は、前記ブリッピング処理を行うことによって入力軸回転数Niが目標範囲の上限値を上回った場合に、エンジン1をトルクダウンさせることによりエンジン回転数Neを速やかに低下させてから、摩擦クラッチ2を微継合させることにより入力軸回転数Niを低下させながらエンジン回転数Neを上昇させて、それら両方を前記目標範囲に収める補正処理を実行する。
(もっと読む)
車両の駆動力制御装置及び駆動力制御方法
【課題】一旦変速比を小さくした場合であっても、ドライバーに違和感を感じさせることなく元の変速比に戻すために変速制御することができる車両の駆動力制御装置及び駆動力制御方法を提供する。
【解決手段】アクセルペダル及びブレーキペダルの両方の踏み込みに基づいて、フェールセーフ制御が必要であるか否かを判定するフェールセーフ判定部(110)と、フェールセーフ制御が必要であるときには制限されたアクセル操作量に基づいて変速制御するとともに、フェールセーフ制御が不要になったときには徐々に制限が解除されるアクセル操作量に基づいて変速制御するトランスミッション制御部(170)と、を備える。
(もっと読む)
車両の制御装置
【課題】車両の制御装置において、車両の走行状態に拘らず燃料カット制御を適正に実行することで燃費の向上を可能とする。
【解決手段】エンジン11と自動変速機32を搭載し、ECU41として、エンジン11の回転数が予め設定された所定の燃料カット復帰回転数以上で且つアクセル開度が0のときに燃料供給を停止する燃料カット制御部51と、アクセルペダルが継続して踏込まれているアイドルオフ時間が予め設定された閾値より短いかどうかを判定するアイドルオフ時間判定部52と、エンジン11により駆動するエアコン38の作動を検出する補機作動検出部53と、車両の運転状態に応じて自動変速機32の変速段を設定すると共にアイドルオフ時間が閾値より短く且つエアコン38が作動するときに変速点を高回転側に変更する変速制御部54とを設ける。
(もっと読む)
車両の速度制御装置
【課題】各車輪の目標車輪速度を適切に設定することにより、車両旋回状態において各車輪の不要な前後スリップの発生を抑制し得る車両の速度制御装置を提供すること。
【解決手段】この装置では、操舵角δfgと、車両のステアリングジオメトリ(Rov=L/tan(δfg))とに基づいて車両の旋回中心(点O)が決定される。この旋回中心と、運転者により設定される指示車速とに基づいて目標角速度ωotが演算される。この目標角速度と、旋回中心からの各車輪の距離Row[**]とに基づいて、各車輪の目標車輪速度Vwt[**]が決定される。これにより、車輪間の移動軌跡差に起因する車輪間での車輪速度差が確保され得るように各車輪の目標車輪速度が個別に決定される。車輪間の移動軌跡差に起因する不要な前後スリップが補償されつつ、車速が指示車速に近づけられる。
(もっと読む)
船外機の制御装置
【課題】変速機を備え、加速時に変速するときの内燃機関の動作を適切に制御して機関回転の吹き上がりを防止すると共に、加速直後における加速性能を向上させるようにした船外機の制御装置を提供する。
【解決手段】変速機を備える船外機の制御装置において、内燃機関の機関回転数NEが目標機関回転数NEaとなるようにスロットルバルブを開閉するアクチュエータ(スロットル用電動モータ)の駆動を制御し、変速機で2速が選択されているとき、内燃機関に対して加速が指示されたか否か判定し(S30)、加速が指示されたと判定されるとき、2速から1速に変速するように変速機の動作を制御し(S46)、2速から1速に変速された後、内燃機関の出力トルクが最大となるように目標機関回転数NEaを変更する(S48)。
(もっと読む)
ハイブリッド自動車の変速制御装置
【課題】トランスミッションに装備した動力取出軸と電動機とを接続したハイブリッド自動車の変速制御装置に関し、電動機を利用した走行中の変速時に、電動機の駆動タイミングを早め且つ動力伝達上の不具合を回避できるようにする。
【解決手段】変速要求が検出されると、主クラッチ4及び副クラッチ22を切断した上で、変速制御手段40dにより変速を行なうと共に、同期制御手段40fにより内燃機関回転速度を変速機入力軸の回転速度に同期させ且つ電動機回転速度を変速機従動軸の回転速度に同期させてから、主クラッチ及び副クラッチを同時に接続指令するように変速制御手段40dにより制御する。変速中には、内燃機関及び電動機の各出力トルクをゼロに制御し変速を完了し、主クラッチ4が接続されたら内燃機関の出力トルクを復帰させ、副クラッチ22が接続されたら電動機30の出力トルクを復帰させる。
(もっと読む)
変速制御装置
【課題】この発明は、エンジンと自動変速機の同調性を確保すること、通信する他の制御装置との通信を不都合なく両立することを目的とする。
【解決手段】この発明は、変速制御装置において、エンジン水温検出手段によって検出されたエンジン水温と変速機油温検出手段によって検出された変速機油温とを入力可能に設け、エンジン水温−変速機油温に基づく遅延時間のマップを、セレクタ装置で人為的に選択されたシフトポジションの変更パターンのうちニュートラルレンジ−前進レンジとニュートラルレンジ−後退レンジとにそれぞれ予め設定し、セレクタ装置で実際に人為的に選択されたシフトポジションの変更パターンと検出されたエンジン水温と変速機油温とから遅延時間をマップで設定した際には、セレクタ装置からの出力信号の情報を設定された遅延時間だけ遅延して他の制御装置のうちのエンジン制御装置に通信するよう制御することを特徴とする。
(もっと読む)
ハイブリッド自動車の変速制御装置
【課題】トランスミッションに装備した動力取出軸と電動機とを接続したハイブリッド自動車の変速制御装置に関し、電動機を利用した走行中のトランスミッションの変速時に、電動機の駆動タイミングを早めることができるようにする。
【解決手段】変速要求が検出されると、主クラッチ4及び副クラッチ22を切断した上で、変速制御手段40dにより所望の変速段への変速を行なうと共に、同期制御手段40fにより内燃機関回転速度を変速機入力軸の回転速度に同期させ且つ電動機回転速度を変速機従動軸の回転速度に同期させてから、クラッチ制御手段40eにより主クラッチ4及び副クラッチ22を同時に接続するように変速制御手段40dにより制御する。
(もっと読む)
制駆動力制御装置
【課題】カーブ走行時における車両の走行状態を運転者の感覚に沿ったものとすることができる制駆動力制御装置を提供すること。
【解決手段】カーブ走行時の車両の制駆動力を制御する制駆動力制御装置であって、カーブの入口側において車両に前後方向の減速度が作用した状態で旋回を開始した後の減速時に、車両に作用する横加速度と前後方向の減速度とが予め設定された第一の関係となるように制駆動力を制御(S90)可能であり、第一の関係は、入口側において旋回を開始したときに車両に作用している横加速度および前後方向の減速度に基づく。制駆動力の制御を実行するか否かは、過去のカーブ走行時に運転者が運転操作をして車両に作用した横加速度と前後方向の減速度との関係である第二の関係に基づき判定される(S60)。
(もっと読む)
走行支援装置
【課題】追従走行制御を行う際、自車両の無駄な加減速を低減し、燃費を向上させる。
【解決手段】走行支援装置は、先行車両の走行状態と先先行車両の走行状態とに基づいて、先行車両と先先行車両との間の車間距離が拡大傾向である否かを判定し、車間距離が拡大傾向であると判定した場合には、自車両の車両速度が先行車両の車両速度よりも高くなるように、自車両の加減速度を制御する制御手段(10)を備える。
(もっと読む)
1 - 20 / 220
[ Back to top ]