
Fターム[3D043EF24]の内容
動力伝達装置の配置〜駆動 (10,444) | 4WDにおける制御、制御対象 (1,466) | スリップ制御 (75)
Fターム[3D043EF24]に分類される特許
1 - 20 / 75
四輪駆動車両の駆動力制御装置
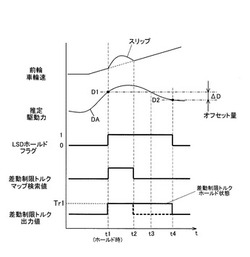
【課題】四輪駆動車両において車輪速ハンチングの抑制と走行性能の確保との両立を図る。
【解決手段】前後トルク配分用クラッチ10によって後輪Wr,Wrに配分する駆動力を制御することで、前輪Wf,Wfを主駆動輪とし後輪Wr,Wrを副駆動輪とする制御を行う四輪駆動車両の駆動力制御装置において、前輪Wf,Wfのスリップが判定された場合に後輪Wr,Wrに差動制限トルクTr1を配分し、その配分開始時点の車両の駆動力D1を記憶し、記憶した駆動力D1に所定のオフセット量ΔDを加算した駆動力を差動制限トルクの配分停止時点を判断するための駆動力の閾値D2として設定し、車両の駆動力DAが設定された閾値D2よりも小さくなった時点で差動制限トルクTr1の配分を停止する。これにより、差動制限トルクの増減が繰り返されることによる車輪速ハンチングを抑制する。
(もっと読む)
車両に働く駆動力を制御する制御装置

【課題】車両の安定性を向上可能な制御装置を提供すること。
【解決手段】車両の前輪駆動力及び後輪駆動力を制御する制御装置は、主駆動輪駆動力及び副駆動輪駆動力を制御する第1の制御手段であって、前記主駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の一方であり、前記副駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の他方である、第1の制御手段と、前記副駆動輪駆動力を制限する副駆動輪制限駆動力を前記第1の制御手段に送る第2の制御手段と、を備える。前記第2の制御手段は、基準駆動力を準備する準備部と、前記副駆動輪制限駆動力の減少を制限する第1の制限部と、前記副駆動輪制限駆動力の増加を制限する第2の制限部と、を有する。前記第2の制御手段は、前記第1の制限部及び前記第2の制限部を介して、前記基準駆動力を前記副駆動輪制限駆動力として前記第1の制御手段に送る。
(もっと読む)
車両に働く駆動力を制御する制御装置
【課題】主駆動輪のスリップを抑制可能な制御装置を提供すること。
【解決手段】変速機を含む車両の前輪駆動力及び後輪駆動力を制御する制御装置は、主駆動輪駆動力及び副駆動輪駆動力を制御する第1の制御手段であって、前記主駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の一方であり、前記副駆動輪駆動力は、前記前輪駆動力及び前記後輪駆動力の他方である、第1の制御手段と、前記変速機の変速比が変化したか否かを検出する第2の制御手段と、を備える。前記変速比が変化したことが前記第2の制御手段によって検出される場合、前記第1の制御手段は、前記副駆動輪駆動力を増加させる一方、前記第1の制御手段は、前記主駆動輪駆動力を減少させる。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う可変フィルタ処理部814、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809、建設車両の変速機の状態を判定する変速状態判定部808を備え、時定数変更部809は、ロックアップの解除指令が出力されてから一定時間経過していない状態にあると判定されたら、可変フィルタ処理部814の時定数を変更するロックアップ切換時定数変更部813を備える。
(もっと読む)
トルク配分装置およびトルク配分方法
【課題】駆動輪のスリップ状態を考慮したトルク配分がおこなわれること。
【解決手段】入力された全トルク指令値を取得する全トルク指令値取得部101と、搭載モータのモータ効率マップ104を取得する効率マップ取得部105と、車両の車体速度を検出する車体速度検出部102aと、駆動輪における駆動輪回転速度を検出する駆動輪回転速度検出部102bと、車体速度及び駆動輪回転速度に基づいて、駆動輪におけるスリップ率を算出するスリップ率算出部103と、スリップ率に基づいて、駆動輪回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成し、動作線上の効率変化式の最適効率トルク値を算出する算出部106と、全トルク指令値、および、最適効率トルク値に基づいて、各々のモータに対するトルク配分値を算出する配分部107と、算出したトルク配分値に基づいて、各々のモータへトルク配分制御する制御部108と、を備える。
(もっと読む)
トルク配分装置およびトルク配分方法
【課題】駆動輪のスリップ状態を考慮したトルク配分がおこなえること。
【解決手段】トルク配分装置100は、入力された全トルク指令値を取得する全トルク指令値取得部101と、搭載モータのモータ効率マップ104を取得する効率マップ取得部105と、車両の車体速度を検出する車体速度検出部102aと、駆動輪回転速度を検出する駆動輪回転速度検出部102bと、車体速度及び駆動輪回転速度に基づいて、駆動輪におけるスリップ率を算出するスリップ率算出部103と、スリップ率に基づいて、駆動輪回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成し、動作線上の効率変化式の最適効率トルク値を算出する算出部106と、全トルク指令値と最適効率トルク値に基づいて、各々のモータに対するトルク配分値を算出する配分部107と、算出したトルク配分値に基づいて、各々のモータへトルク配分制御する制御部108と、を備える。
(もっと読む)
トルク配分装置およびトルク配分方法
【課題】駆動輪のスリップ状態を考慮したトルク配分がおこなえること。
【解決手段】トルク配分装置100は、入力された全トルク指令値を取得する全トルク指令値取得部101と、搭載モータのモータ効率マップ104を取得する効率マップ取得部105と、車両の車体速度を検出する車体速度検出部102aと、駆動輪における駆動輪回転速度を検出する駆動輪回転速度検出部102bと、車体速度及び駆動輪回転速度に基づいて駆動輪のスリップ率を算出するスリップ率算出部103と、スリップ率に基づいて駆動輪回転速度とトルクの関係を示す動作線上の効率値を示す効率変化式を作成し、動作線上の効率変化式の最適効率トルク値を算出する算出部106と、全トルク指令値と最適効率トルク値に基づいて各々のモータに対するトルク配分値を算出する配分部107と、算出したトルク配分値に基づいて各々のモータへトルク配分制御する制御部108と、を備える。
(もっと読む)
四輪駆動車の制御装置
【課題】四輪駆動車において、従駆動輪への駆動源の出力の分配による駆動ロスの増加を抑制しつつ駆動源の出力を従駆動輪へ分配させることができ、四輪駆動時に燃費が悪くなることを抑制することができるようにする。
【解決手段】駆動源14の出力を主駆動輪12Fと従駆動輪12Rとに分配する駆動力分配手段28を有する四輪駆動車の制御装置において、駆動力分配手段の作動を制御する分配制御手段34は、主駆動輪のスリップ量が所定量以上である場合に、主駆動輪の駆動ロスが従駆動輪への駆動源の出力の分配による駆動ロスより大きいと判定されたとき従駆動輪への駆動源の出力の分配を増加させるように、主駆動輪の駆動ロスが従駆動輪への駆動源の出力の分配による駆動ロスより小さいと判定されたとき従駆動輪への駆動源の出力の分配を減少させるように駆動力分配手段の作動を制御する。
(もっと読む)
駆動力伝達装置
【課題】装置を小型軽量化できると共に応答遅れを極めて少なくでき、さらに前輪または後輪のスリップ時のトラクションを向上できる駆動力伝達装置を提供すること。
【解決手段】駆動源5の駆動トルクは中央差動制限装置7から前部差動装置4及び後部差動装置10に分配され、前部差動装置4及び後部差動装置10に分配された駆動力は、前輪2FL,2FR及び後輪2RL,2RRに分配される。前部差動装置4及び後部差動装置10の少なくとも一方と、中央差動制限装置7とはトルク感応式の差動制限装置で構成されているので、装置を小型軽量化できる。また、車輪2のスリップ時には、スリップした車輪2の駆動力が、トルク感応式の中央差動制限装置7により前輪2FL,2FR又は後輪2RL,2RRに増幅して非差動で分配される。その結果、スリップ時のトラクションを向上できると共に、時間的な応答遅れを極めて少なくできる。
(もっと読む)
全輪駆動車の駆動力配分制御装置
【課題】燃費訴求モードの効果をより向上させると共に、各モードの差を明確にして車両商品性を向上させる。
【解決手段】走行モードが燃費訴求モードでない場合、トランスファクラッチの締結力を制御して前後輪の駆動力配分を車両の運動状態に応じて最適に制御する通常のAWD制御を行い、燃費訴求モードである場合、スリップが検知されているか否かを調べる。そして、スリップが検出されていない場合には、トランスファクラッチを開放状態として前輪への駆動力を100%とする前輪駆動の制御を行い、スリップが検出されている場合には、トランスファクラッチを締結状態に制御してスタンバイAWD制御を実行し、スリップを早期に解消させる。これにより、燃費訴求モードの効果をより向上させると共に、各モードの差を明確にして車両商品性を向上させることができる。
(もっと読む)
四輪駆動車及びその制御装置
【課題】2輪駆動状態での車両の発進時にスリップが発生した場合でも、噛み合いクラッチを介してトルクが伝達される補助駆動輪に速やかにトルクを伝達することが可能な四輪駆動車及びその制御装置を提供する。
【解決手段】四輪駆動車101は、駆動源であるエンジン102と、エンジン102のトルクを前輪104L,104R及び後輪105L,105Rに伝達する駆動力伝達系106と、駆動力伝達系106に設けられ、凹部と凸部との係合により後輪105L,105R側にトルクを伝達することが可能な噛み合いクラッチ130と、路面の摩擦係数に関連する指標値に基づいて、路面の摩擦係数が所定値よりも低いか否かを判定する判定手段9b1と、判定手段9b1により路面の摩擦係数が所定値よりも低いと判定されたとき、発進前に噛み合いクラッチ130の係合を行わせる制御信号を発生する制御手段9b2とを有する。
(もっと読む)
少なくとも選択的に4輪駆動される自動車用の全輪クラッチのトルク分配を制御するための方法および装置
【課題】少なくとも選択的に4輪駆動される自動車用の全輪クラッチのトルク分配を制御するための方法および装置を提供する。
【解決手段】この自動車は第1車軸と第2車軸を有するクラッチ制御式全輪駆動装置を備え、全輪クラッチ2の変更可能な調節は第1車軸12と第2車軸22への所望なトルク分配を設定し、この場合、自動車1の第1車軸12と第2車軸22の各車輪のタイヤスリップの一連の測定データに基づいておよび車輪のタイヤスリップの少なくとも1つの特性マップに基づいて、それぞれの車輪に作用する縦方向力に依存して、第1と第2車軸への全輪クラッチ2の実際のトルク分配が、車輪の縦方向力を介して求められ、この場合、全輪クラッチ2の求められた実際のトルク分配を、全輪クラッチ2の所望なトルク分配と比較することによって、制御偏差が求められ、この制御偏差が全輪クラッチ2のトルク分配を制御するための制御回路に供給される。
(もっと読む)
車両の走行用油圧回路
【課題】 車輪のスリップや空転による走行不能を防止する。
【解決手段】 前後輪用の油圧ポンプ5と6に、左右の前輪1L,1Rと後輪2L,2R用の油圧モータ3L,3Rと4L,4Rを、先端側を分岐させた前進時供給側圧油管路13,22と後進時供給側圧油管路14,23を介して並列に接続する。前進時供給側分岐圧油管路13aと13b,22aと22bに、開閉制御弁15aと15b,24aと24bを設け、これと並列接続になるようにフローディバイダー20,27を設ける。更に、開閉制御弁15aと15b,24aと24bの閉位置への切換え操作用のパイロット弁18を備える。一方の前輪1L又は1Rや後輪2L又は2Rに空転が生じた場合は、開閉制御弁15a,15b,24a,24bを閉位置に切換え、作動油12をフローディバイダー20,27に通すことで、左右の油圧モータ3Lと3R,4Lと4Rへ同量の作動油12を供給させる。
(もっと読む)
車両の駆動状態制御装置
【課題】オンデマンド式装置において、4輪駆動状態から2輪駆動状態への切り換えの際、クラッチ駆動電流が無駄に消費されること、並びに、車輪に大きなスリップが発生することを抑制すること。
【解決手段】2輪駆動状態において駆動輪(後輪)に加速スリップが発生したとき、駆動システムが2輪駆動状態から4輪駆動状態へと切り換えられる。即ち、多板クラッチ機構の伝達可能最大トルクTが「0」から所定値T1に増加する。4輪駆動状態では、車輪の何れにも加速スリップが発生しない状態で車両が所定距離Daだけ走行する毎に、伝達可能最大トルクTが現在値から所定値Aだけステップ的に減少していく。即ち、多板クラッチ機構C/Tに供給されるクラッチ駆動電流Iが徐々に(ステップ的に複数回)減少していくとともに、前輪(後輪)への駆動トルク配分が徐々に減少(増加)していく。
(もっと読む)
車両用制御装置および車両用制御方法
【課題】駆動状態を維持しつつ、油温の上昇を抑制する。
【解決手段】ECUは、車両の駆動状態が4輪駆動状態であって(S100にてYES)、作動油の温度が許容範囲内でなく(S102にてNO)、かつ、4輪駆動状態を継続する必要がある場合に(S104にてYES)、最高車速を変更する制御を実行するステップ(S106)と、4輪駆動状態を継続する必要がない場合に(S104にてNO)、車両の駆動状態を4輪駆動状態から2輪駆動状態に切換える制御を実行するステップ(S108)と、車速を制御するステップ(S110)とを含む、プログラムを実行する。
(もっと読む)
電気自動車の車両制御装置
【課題】各車輪を別個独立した電気モータによって駆動する電気自動車において、タイヤ毎のノンユニフォーミティの影響を低減し、操縦安定性の低下を防止する。
【解決手段】電気自動四輪車10の車両制御装置100は、ヨーモーメント演算部140と、スリップ率演算部150と、スリップ率制御部160とを備え、ヨーモーメント演算部140において算出されたヨーモーメントが零になるスリップ率を算出する。トルク演算部170は、直進判定・加速度演算部120において直進状態であることが検出されたとき、スリップ率制御部160によって算出された「ヨーモーメントが零になるスリップ率」になるように、インホイールモータ30FL,30FR,30RL,30RRの出力トルクを最適化する。
(もっと読む)
車両の駆動制御装置及び駆動制御方法
【課題】クラッチ接続時のショックを抑えつつ、2輪駆動走行から4輪駆動走行への応答性を向上した車両の駆動制御を提供する。
【解決手段】主駆動輪を主駆動源で駆動し、主駆動輪と異なる従駆動輪をモータで駆動可能に構成する。モータから従駆動輪へのトルク伝達経路の途中にクラッチを配置し、4輪駆動条件を満足した状態では、クラッチを接続状態に制御してモータの駆動トルクを従駆動輪に伝達し、4輪駆動条件を満足しない2輪駆動走行中はクラッチを開放状態に制御する。上記2輪駆動走行中に4輪駆動条件となる可能性が高い状態となったと推定すると、クラッチの開放中に上記クラッチの従駆動輪側の回転数に当該クラッチのモータ側の回転数が同期するようにモータを駆動する。
(もっと読む)
車両の駆動力制御装置及びその方法
【課題】主駆動輪のスリップ時に従駆動輪を最適に制御することである。
【解決手段】車両の駆動力制御装置は、主駆動輪がスリップしたらモータの駆動によって従駆動輪を駆動するものであり、主駆動輪の駆動力とモータ4の駆動によって駆動される従駆動輪の駆動力との加算値として車両総駆動力を算出し(ステップS690)、車両総駆動力の増加方向に主駆動輪のスリップ状態を制御する(ステップS700、ステップS710、ステップS720)。
(もっと読む)
車両用制御装置、車両用制御装置の制御方法、駆動力配分制御装置及び駆動力配分制御装置の制御方法
【課題】トルク配分装置の過熱を防止しつつ、車輪のスリップを抑制できる車両用制御装置、車両用制御装置の制御方法、駆動力配分制御装置及び駆動力配分制御装置の制御方法を提供する。
【解決手段】車両1に、各車輪12R,12L,13R,13Lに制動力を付与するブレーキ装置と、ブレーキ装置の作動を制御して車両1の走行安定性を向上させるESC制御を実行するESCECU33とを搭載した。4WDECU31は、トルク配分装置6の温度を推定する。そして、4WDECU31は、推定された温度が閾値温度よりも大きい場合には、スリップ閾値を第1の閾値から該第1の閾値よりも小さい第2の閾値に変更させるための閾値用制御信号S1をESCECU33に出力するようにした。
(もっと読む)
動力伝達装置及びこの動力伝達装置を用いた四輪駆動車
【課題】必要なときに駆動トルクの断続が可能であって、車両への搭載性を悪化させることなく、駆動トルクの制御が可能な動力伝達装置及びこの動力伝達装置を用いた四輪駆動車を提供する。
【解決手段】筒状の回転部材5と、軸状の回転部材9と、回転部材5,9間に配置され複数のクラッチ板3,7からなる多板クラッチ11と、多板クラッチ11に締結力を付与するパイロット機構13と、メインクラッチ11の締結力を制御する電磁石15とを備えた動力伝達装置1において、筒状の回転部材5が、第1の部分17と第2の部分19とからなり、第2の部分19に常時回転方向に係合し、電磁石15への給電により筒状の回転部材5に磁力線が透過したとき、第2の部分19から第1の部分17へ向け吸引移動されて第1の部分17と第2の部分19とが回転方向に係合するクラッチ部材25を備えた。
(もっと読む)
1 - 20 / 75
[ Back to top ]