
Fターム[3D046HH25]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体加減速度 (903)
Fターム[3D046HH25]の下位に属するFターム
車体前後方向 (371)
Fターム[3D046HH25]に分類される特許
81 - 100 / 532
バーハンドル車両用ブレーキ制御装置
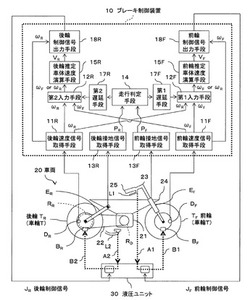
【課題】車輪速度に基づきこの車両の動作を制御するバーハンドル車両用ブレーキ制御装置に関し、前輪又は後輪が浮上している状態を的確に認識するとともに、このように車両が浮上走行している場合であっても的確な推定車体速度を導いて車両を適切に制御する。
【解決手段】車両(20)の前輪(TF)及び後輪(TR)の車輪速度に基づき車両(20)を制御するバーハンドル車両用ブレーキ制御装置(10)であって、前輪接地信号(PF)が接地を示すときは前輪速度信号(ωF)を適用し浮上を示すときは後輪速度信号(ωR)を適用して前輪推定車体速度(VF)を演算する前輪推定車体速度演算手段(15F)と、後輪接地信号(PR)が接地を示すときは後輪速度信号(ωR)を適用し浮上を示すときは前記前輪速度信号(ωF)を適用して後輪推定車体速度(VR)を演算する後輪推定車体速度演算手段(15R)と、を備えることを特徴とする。
(もっと読む)
制動制御装置

【課題】 操舵制御装置で用いられる2つ以上の操舵角センサ値のうち、1つを制動制御装置から供給を受けることによって操舵角センサ数の低減を図った場合であっても、操舵角センサ異常の誤検出を回避した制動制御装置を提供する。
【解決手段】 操舵角、車輪速、および他の車両情報に基づき各輪の制動力を演算し、演算された前記制動力に基づいて前記各輪のホイルシリンダ圧を制御する制動制御装置において、前記制動制御装置は車両共有ネットワークと接続し、前記制動制御装置は、前記車輪速および前記他の車両情報に基づき前記操舵角の中立補正を行い、この中立補正後の操舵角に基づき前記各輪の制動力を演算するとともに、前記中立補正前の操舵角を、前記車両共有ネットワークに送信することとした。
(もっと読む)
車線逸脱防止装置
【課題】車線逸脱防止制御の終了後の車両姿勢のばらつきを抑制する。
【解決手段】車線逸脱防止装置は、車線逸脱防止制御の開始を検出した場合(ステップS21)、その時点の車両状態及び走行環境のうちの少なくとも一方を検出し(ステップS22)、検出した車両状態及び走行環境のうちの少なくとも一方に基づいて、車両が走行車線に戻る際の車線逸脱防止制御の終了タイミングを補正する(ステップS24)。
(もっと読む)
制動制御装置およびその方法
【課題】 旋回中等、制動制御が実行されている際にステアバイワイヤ制御系の故障が発生した場合であっても、舵角センサの検出値に基づき演算される目標ヨーレートの値が変化し、車両挙動制御が誤介入して運転者に違和感を与えるおそれを回避した制動制御装置を提供する。
【解決手段】 操舵角に基づき算出されたヨーレートに基づいて各輪の制動力を演算し、演算された前記制動力に基づいて前記各輪の制動力を制御する制動制御装置において、前記操舵角に対する車両応答性の変化を検出した場合、前記ヨーレートの算出モデルを切り替えることとした。
(もっと読む)
車両の走行安全装置
【課題】安全装置の不適切作動を簡単に学習する。
【解決手段】カーブ認識部17が認識したカーブの形状に基づき該カーブを適正に通過可能な適正通過速度を設定する適正車両状態設定部18と、自車速度と適正通過速度とを比較する比較部19と、比較部19による比較結果に基づいて自車速度が適正通過速度より大きいときに自車両に設けられた安全装置21を作動させる作動部20と、を備える車両の走行安全装置10であって、認識カーブに対する作動部20の作動が不適切作動であるか否かを判定する不適切作動判定部23と、不適切作動判定部23により不適切作動と判定された認識カーブを記憶する不適切作動カーブ記憶部24と、不適切作動カーブ記憶部24により記憶された認識カーブに対する作動部20の作動を抑制する抑制手段と、を備える。
(もっと読む)
車両挙動安定化制御装置
【課題】車両の横滑りを抑制しつつ、横転も防止できる車両挙動安定化制御装置を提供する。
【解決手段】横転傾向の発生が検出された場合に、横滑り防止制御の為に演算されていたブレーキ力の制御量Adやタイヤ角の制御量Bdを補正し、横転防止制御の為のブレーキ力の制御量Aおよびタイヤ角の制御量Bを求める。これにより、横滑り防止制御中に横転傾向が発生した場合に、横滑り防止制御よりも優先して横転防止制御を行うことができ、横転傾向を抑制することが可能となる。
(もっと読む)
車線逸脱防止装置
【課題】乗員への車線逸脱可能性があることの報知効果を高くする。
【解決手段】車線逸脱防止装置は、走行車線に対する車両の逸脱傾向の度合いに基づいて、車両に付与するヨーモーメントを算出し(ステップS9)、逸脱傾向の度合いが高い場合、算出したヨーモーメントを車両に付与し、走行車線に対する車両の逸脱を防止する(ステップS17)。この車線逸脱防止装置は、算出したヨーモーメントが所定値よりも小さい場合、該ヨーモーメントを増加補正するとともに、車両へのヨーモーメントの付与時間を短縮する補正をする(ステップS12〜ステップS14)。
(もっと読む)
アンチスキッド制御装置
【課題】 路面上の突起または凹部乗り越え時等、後輪アンチスキッド制御が不要な場合、後輪の制動力不足を解消したアンチスキッド制御装置を提供する。
【解決手段】 ホイルシリンダの液圧を減圧および増圧可能な液圧制御弁と、減圧時にホイルシリンダから排出したブレーキ液を貯留するリザーバと、前記リザーバに貯留されたブレーキ液をマスタシリンダに戻すポンプと、車輪のロックを回避するように前記ホイルシリンダの液圧を減圧するアンチスキッド制御手段とを備えたアンチスキッド制御装置において、前記アンチスキッド制御手段は、後輪ホイルシリンダ圧の減圧が不要と判断した場合、前記後輪ホイルシリンダ圧の増圧量の抑制を低減、または減圧量の低減を行うこととした。
(もっと読む)
車両用保護システム
【課題】本発明は、車両用保護システムに係り、車速情報を用いた保護デバイスの作動要否の誤判定を防止することにある。
【解決手段】車両のVSC制御に用いられる各車輪の車輪速による車体速情報を用いて、車両と衝突した歩行者を保護するためのエアバッグの展開要否を判定する車両用保護システムにおいて、VSC制御に用いられる各車輪の車輪速による車体速情報がVSC制御の作動中に得られるか否かを判別する(ステップ100)。そして、VSC制御に用いられる各車輪の車輪速による車体速情報がVSC制御の作動中に得られたと判別される場合に、上記の歩行者保護エアバッグの展開要否を判定するのに用いる車体速情報を、そのVSC制御に用いられる各車輪の車輪速による車体速情報に代えて所定のフェールセーフ値とする(ステップ104)。
(もっと読む)
車線逸脱防止装置
【課題】運転者の意思に適合させた車線逸脱防止制御を行う。
【解決手段】車線逸脱防止装置は、車両の旋回方向と、旋回路の旋回方向との一致及び不一致を判定するとともに(ステップS3)、旋回路の外側及び内側のうちのどれに対して車両が逸脱傾向を示しているのかを判定し(ステップS4)、それら判定結果に基づいて、車線逸脱防止制御の制御内容を変更する(ステップS5)。
(もっと読む)
車両の走行制御装置
【課題】カーブ走行中において車速制御と旋回走行制御との協調を図る。
【解決手段】走行制御装置は、制駆動力制御により、目標車速に実車速を一致させる制御を行う車速制御と、カーブ内で車両を減速制御する旋回走行制御とを行っており、旋回走行制御の終了を検出した場合(ステップS41)、該旋回走行制御の終了時点の車速に基づいて、車速制御における目標車速を減少補正する(ステップS44、ステップS47)。
(もっと読む)
車線逸脱防止装置
【課題】自車両の車線逸脱防止に必要なヨーモーメントを確保する。
【解決手段】車線逸脱防止装置は、車線逸脱防止制御の制御量の不足量を取得するとともに(ステップS3)、その不足量に基づいて、車線逸脱防止制御の制御終了タイミングを変更する一方で(ステップS5)、走行車線に対する自車両の逸脱傾向を判定し(ステップS4、ステップS8)、その結果、車線逸脱傾向がある場合、走行制御により走行車線に対する自車両の逸脱を防止する車線逸脱防止制御を行うとともに、前記変更した制御終了タイミングになったときに、車線逸脱防止制御を終了する(ステップS9〜ステップS11)。
(もっと読む)
制動力制御装置
【課題】減速制御中であってもアクセル操作で車両を加速でき、且つ、アクセル操作を行っても減速制御を継続できるようにすること。
【解決手段】アクセル操作によって車両を加速させようとする運転者の加速意思を実現するためのドライバ加速度意思要求トルクetrq-drvを算出し、車両の旋回時に減速制御が発生しようとするオーバスピード抑制トルクetr q-xgを算出し、そのドライバ加速度意思要求トルクetrq-drvからオーバスピード抑制トルクetrq-xgを減じた減算結果に基づいて車両が発生している駆動トルクを変動させるようにした。そのため、車両の旋回時に、運転者がアクセル操作を行うと、そのアクセル操作に応じてドライバ加速度意思要求トルクetrq-drvが大きく変動し、車両が発生している駆動トルクの変動量も大きくなり、減速制御中であっても車両を加速することができ、また、減速制御が中断されないので減速制御を継続することができる。
(もっと読む)
走行支援制御装置および走行支援制御方法
【課題】障害物を検出した後、同一障害物を検出できなくなっても、走行支援制御が途中で一旦途切れることを抑制することができる走行支援制御装置および走行支援制御方法を提供すること。
【解決手段】自車両の進行方向に存在する障害物の位置を検出する前方ミリ波センサ3および障害物検出部21と、自車両の走行を支援する走行支援制御を行う走行支援制御部26と、検出された障害物と自車両との衝突危険度、すなわちTTCを算出する衝突危険度算出部22と、算出されたTTCに基づいて走行支援制御の制御要、制御不要を判断する走行支援制御判断部23と、を備える走行支援制御装置1−1において、走行支援制御判断部23は、算出されたTTCに基づいて制御要と判断した後に、算出されたTTCに基づいて制御不要と判断されても、制御要の状態を所定保持期間T保持する。
(もっと読む)
制動力制御装置
【課題】減速制御によって生じる違和感を低減すること。
【解決手段】クラッチペダルが踏まれているか否かを判定し(ステップS72)、クラッチペダルが踏まれていると判定されると減速制御による減速度を小さくするようにした(ステップS73)ため、例えば、変速比を操作してさらなる加速をするために、運転者がクラッチペダルを踏むと、減速制御による制動力が低減され、その結果、運転者の意図に沿った加速を実現でき、減速制御によって生じる違和感を低減することができる。
(もっと読む)
車両の走行安全装置
【課題】安全装置の作動許容範囲を拡大する。
【解決手段】自車両の車両状態を検出する車両状態検出部13と、記憶部11の道路データに基づき自車両の進行方向に存在するカーブの形状を認識するカーブ認識部14と、認識したカーブの形状に基づき該カーブを適正に通過可能な適正車両状態を設定する適正車両状態設定部16と、自車両の車両状態と適正車両状態とを比較する比較部17と、自車両の旋回状態を検知する旋回状態検知手段と、自車両の車両状態が適正車両状態にないときに自車両に設けられた安全装置20の作動を許容し、自車両が旋回状態であることが検知された場合に安全装置20の作動を行わない作動部18と、を備える車両の走行安全装置10であって、自車両がカーブ進入初期状態であるか否かを判定するカーブ進入初期状態判定部15を備え、作動部18は自車両がカーブ進入初期状態である場合には安全装置20の作動を許容する。
(もっと読む)
車両挙動制御装置
【課題】簡易な制御でロール振動の発生を効果的に抑制できる車両挙動制御装置を提供する。
【解決手段】車両挙動制御装置1では、車両のロール角、ヨー角、横力、上下変位に基づいて車両におけるロール振動の発生の有無を判断し、ロール振動の発生を検出した場合、内輪の横力Finよりも外輪の横力Foutを減少させる。これにより、車両と路面との横方向μが低下し、車両の横滑りが生じるため、ロール振動時に車両の外輪側で発生する上下方向の運動エネルギーを、車両が旋回外側にシフトする方向の運動エネルギーに変換することが可能となり、ロール振動が効果的に抑制される。また、横力の制御にあたり、普及率の高まっているVSC制御部10による各車輪のブレーキ圧制御を用いることで、高い応答性を確保しつつ、制御手段の複雑化を回避できる。
(もっと読む)
車両の走行安全装置
【課題】車両の進行方向前方に存在するカーブを通過する際において、適切に安全装置を作動させる。
【解決手段】自車両の進行方向前方の所定距離内に存在するカーブの密度を算出するカーブ密度検出部15を備え、車両状態検出部13により検出された車両状態が適正車両状態設定部19により設定された適正車両状態であるか否かを判定するための判定閾値を学習部16により学習されたカーブ走行時における運転者の運転特性に基づいて変更する判定閾値変更部17は、カーブ密度検出部15により算出されたカーブ密度が所定値以下の場合には、変更した判定閾値を徐々に初期の値へと戻す。
(もっと読む)
車線逸脱防止装置
【課題】運転者の操舵操作に基づく車線逸脱防止制御の抑制を適切に行う。
【解決手段】車線逸脱防止装置は、車線逸脱防止制御の実施に関連して発生(例えば、トルクステアにより発生)する操舵角変化に基づいて、基準舵角δlatchを補正し(ステップS23、ステップS24)、補正した基準舵角δlatchと運転者の操舵操作による舵角δとの比較結果に基づいて、車線逸脱防止制御の制御内容を変更する(ステップS25、ステップS26)。
(もっと読む)
車両制御装置
【課題】電動スタビライザーとMATの協調制御を行う車両制御装置を提供することを目的とする。
【解決手段】タービンホイールにより過給を行うターボ過給機104と、電気モータ108により前記タービンホイールを駆動することにより、前記ターボ過給機104による過給をアシストする過給アシスト手段603と、電動駆動手段を用いてスタビライザーの特性を制御するスタビライザー制御手段605と、前記スタビライザー制御手段605が動作中に、前記過給アシスト手段603による過給のアシストを停止する過給アシスト停止手段602とを有することを特徴とする車両制御装置1。
(もっと読む)
81 - 100 / 532
[ Back to top ]