
Fターム[3D046HH25]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体加減速度 (903)
Fターム[3D046HH25]の下位に属するFターム
車体前後方向 (371)
Fターム[3D046HH25]に分類される特許
41 - 60 / 532
車両挙動制御装置
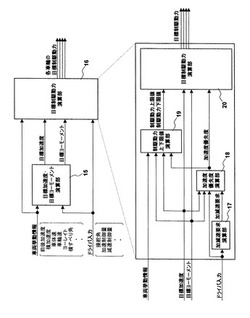
【課題】制駆動力限界付近においてもドライバの意図する車両の加減速性と旋回性を実現する各車輪の制駆動トルクを演算すること。
【解決手段】車両挙動情報、車両外界情報に基づいて車両の目標挙動制御量を演算する手段と、ドライバの加減速要求と旋回要求を検出し、これらをドライバ要求量として演算する手段と、目標挙動制御量とドライバ要求量から、目標加速度と目標ヨーモーメントを演算し、これらを実現するように各車輪の目標制駆動力を演算し、各車輪の制駆動トルクを制御する装置において、目標ヨーモーメントに対する目標加速度の優先度を加速度優先度として、ドライバ要求量と目標挙動制御量に基づいて演算し、各車輪に対し制駆動力上限値と下限値を演算する手段を備えて、少なくとも一輪の目標制駆動力が制駆動力上限値又は下限値を超える場合、制駆動力上限値と下限値、加速度優先度に基づいて各車輪の目標制駆動力を演算すること。
(もっと読む)
制動制御装置

【課題】後方衝突時における二次的事故の発生を防止しかつ自車両に加わる衝撃を軽減する制動制御装置を提供する。
【解決手段】車両の車輪に設けられたブレーキ装置10の制動力を制御する制動制御装置を、車両の衝突を検出する衝突検出手段41と、車両の前後方向における加速度を検出する加速度検出手段43とを備え、衝突検出手段41が衝突を検出した後、加速度検出手段43が検出した加速度が所定の閾値を下回った場合にブレーキ装置10に制動力を発生させる構成とする。
(もっと読む)
車両の走行制御装置
操舵制御手段、制駆動力制御手段、接地荷重制御手段を備えた車両に於いて、演算負荷や消費エネルギの増大を抑制しつつ各制御手段の制御量を最適化し、車両の走行運動を最適に制御する。
【解決手段】車両が緊急の走行運動制御を必要とするときには(440、450)、全ての制御手段についての評価関数を演算して車両全体の目標走行運動制御量を全ての制御手段に配分することにより各制御手段の目標制御量を演算し(700)、車両が緊急の走行運動制御を必要としないときには、車両の走行状態に基づいて特定の制御手段の目標制御量を演算し、特定の制御手段の目標制御量に基づいて特定の制御手段の制御による車両の物理量の変化量を演算し、車両全体の目標走行運動制御量及び車両の物理量の変化量に基づいて他の制御手段の目標制御量を演算する(500、600)。
(もっと読む)
車両の制動制御装置、及び車両の制動制御方法
【課題】車両の旋回方向内側の車輪に制動力が付与された場合において、該車両の旋回半径を短くすることができる車両の制動制御装置、及び車両の制動制御方法を提供する。
【解決手段】車両の制動制御装置のECUは、ステアリングホイールの操舵角の絶対値が操舵角閾値以上である場合に、車両の旋回方向内側の各車輪(例えば右前輪及び右後輪)のうち予め設定された制御用車輪(例えば右後輪)に対して制動力を付与する旋回時制動制御を実行する。この状態で、ECUは、各車輪のうち最も車輪速度の遅い車輪(制御用車輪)のスリップ率SLPを検出し、該スリップ率SLPが予め設定されたスリップ率閾値KSLP以上である場合、制御用車輪に対する制動力BPを、スリップ率SLPがスリップ率閾値KSLP未満である場合よりも低下させる。
(もっと読む)
ETCレーン走行中にヨー制御される車輌
【課題】ETCレーンは両側縁をかなり高い縁石にて限られたかなり狭い通路であり、車輌が正しく直進走行させられないと、車輪を縁石に接触させる恐れがあるが、ヨーレート偏差に基づいてヨー制御を行う挙動制御装置は、これを発動させるヨーレート偏差の閾値がETCレーン走行時に要するヨー微調整のヨーレートよりも大きいので、ETCレーンでは作動しない。この点を改良してETCレーンでも挙動制御装置を作動させる。
【解決手段】ETCレーンを走行する間、車体ヨー変化を制御するヨー制御手段の発動を抑制する車体ヨー変化の閾値を臨時に低減する。
(もっと読む)
電動パーキングブレーキ制御装置
【課題】ヒルホールド機能を備えるとともに、安全性をより向上した電動パーキングブレーキ制御装置を提供する。
【解決手段】パーキングブレーキ10を駆動する電動アクチュエータ20を制御する電動パーキングブレーキ制御装置40を、少なくとも車両の速度変化に基づいて路面の傾斜を判定する傾斜判定部41cと、傾斜判定部41cが判定した路面の傾斜に応じて、パーキングブレーキ10の制動力を、平地用制動力よりも大きい傾斜路用制動力に設定するとともに、傾斜路用制動力による制動の解除後であって、所定の車速条件を充足する前に車両が停止した場合は、この車速条件が充足した場合よりも緩和された条件において傾斜路用制動力を設定する制動力設定部41とを備える構成とする。
(もっと読む)
制動装置の制動利得特性が可変に制御される車輌
【課題】摩擦係数が低い低μ路に於いて制動時の車輪スリップを抑制しつつ許容される時間内に十分な減速効果を上げることができるようにする一方、摩擦係数が高い高μ路に於いては軽い制動操作で快適な制動が達成されるようにする。
【解決手段】路面の摩擦係数の大小を判別し、低μ路に於いてはブレーキペダルの踏量に対する制動力の増大率を表す制動利得を踏量が小さいとき小さくし、踏量が大きいとき大きくし、また高μ路に於いては踏量が小さいとき大きくし、踏量が大きいとき小さくする。
(もっと読む)
車両運動制御装置
【課題】車輪のグリップ限界における制御特性の変化を穏やかなものとし、ドライバが違和感無く、車両を適切に制御して安定性の向上を図る。
【解決手段】スロットル弁制御装置1では、マップ設定部1aで、予め設定しておいたアクセル開度−スロットル開度のマップにおいて、路面μの値に応じて可変閾値εを定める。可変閾値εは、路面μが高い程、高い値に、路面μが低い程、低い値に設定される。アクセル開度は、可変閾値εより高い領域においては、アクセル開度に対するスロットル開度の変化量が、通常の変化量より低下させられて設定される。すなわち、路面μが高い場合には、通常の特性であっても十分安定性を確保して走行できるが、路面μが低い場合には、アクセル開度に対するスロットル開度の変化量を小さくして、ドライバのアクセル操作に対して十分な安定性を確保できるような特性へと変化させる。
(もっと読む)
車両の運転制御装置
【課題】車両の電力の低下時に、できるだけ車両の運動制御の作用効果を低減させずに、運動制御に於いて作動する電動式のアクチュエータ又はモータの消費電力を低減する車両の運動制御装置を提供すること。
【解決手段】本発明の運動制御装置は、車両に於いて使用可能な電力が低いとき、アクチュエータの作動を制御する手段が、車両の運動制御のためのアクチュエータの作動を使用可能な電力が高いときに比べて低い供給電力にて且早い時期にて開始する。また、制動制御用アクチュエータとスロットル制御用アクチュエータを含む場合には、車両に於いて使用可能な電力が低いとき、制動制御用アクチュエータの制御量を使用可能な電力が高いときに比べて小さくする。
(もっと読む)
車両挙動制御装置
【課題】セルフアライニングトルクとほぼ同じ位相関係にある実路面反力トルクを用いて駆動力制御量を求めることで、初期不安定状態においても適切な駆動力制御が実現され、車両の安定性や旋回性を向上させることができる車両挙動制御装置を得る。
【解決手段】車速を検出する車速検出手段と、操舵角又は実舵角を検出する舵角検出手段と、タイヤと路面の間に発生する実路面反力トルクを検出する実路面反力トルク検出手段と、車速と舵角と舵角に対する路面反力トルクの勾配とから基準路面反力トルクを演算する基準路面反力トルク演算手段を備え、検出した前記実路面反力トルクと前記基準路面反力トルクに基づいて駆動力調整装置の駆動力制御量を決定する。
(もっと読む)
車線逸脱防止装置
【課題】ヨーレイトセンサの検出精度の影響を受けず、最適値のヨーモーメントを算出する。
【解決手段】車線逸脱防止装置は、車線逸脱防止制御として車両に付与する目標ヨーモーメントを補正ヨーモーメントを用いて算出し(ステップS7、ステップS8)、走行車線に対する車両の逸脱傾向の度合いが高いと判定した場合、目標ヨーモーメントが車両に付与されるように車両の走行制御をしており(ステップS10)、補正ヨーモーメント算出処理により、車両のヨーレイトが、該ヨーレイトに対応して設定した所定のしきい値未満であると推定される間、減速度を変数に含んで目標ヨーモーメントを算出し、車両のヨーレイトが前記所定のしきい値以上であると推定した場合、ヨーレイトセンサが検出したヨーレイトを変数に含んで目標ヨーモーメントを算出する。
(もっと読む)
車両用運転支援装置
【課題】必要なときだけ確実に運転支援を行う。
【解決手段】車両の現在位置、車両前方のカーブ情報および現在の車両状態に基づいて車両前方カーブ通過時の車両状態を推定する(1a)とともに、記憶されている過去のカーブ通過時の車両状態に基づいて運転者のカーブ通過時の許容車両状態を推定し(1b)、車両前方カーブ通過時の推定車両状態と運転者のカーブ通過時の許容車両状態とに基づいてカーブにおける運転支援を行うか否かを判定する(1c、1d)。
(もっと読む)
車両運動制御方法および車両運動制御装置
【課題】 コスト増や運転の違和感を伴うことなく、ヨーレートの制御精度の向上を図ることができる車両運動制御方法および車両運動制御装置を提供する。
【解決手段】 ヨーレートγを検出するヨーレートセンサと、ヨー角加速度推定値dγhatに基づいて、ヨーレートγhatを推定する積分器102jと、ヨーレート操作量と、ヨーレート検出値γとヨーレート推定値γhatとの偏差であるヨーレート偏差(γ-γhat)と、このヨーレート偏差の積分値と、に基づいて、ヨー角加速度dγhatを推定するヨー角加速度推定部102と、目標ヨーレートtγとヨーレート検出値γとヨー角加速度推定値dγhatとに基づいて、ヨーレートの目標応答を満たすヨーレート操作量(フィードバック前輪舵角操作量δfFB,フィードバック後輪左右駆動力差操作量uFB)を演算するF/B指令部103と、を備える。
(もっと読む)
車両挙動制御装置
【課題】 車両のロール振動の発生を精度良く検出し適切にロール振動の発生を抑制できる車両挙動制御装置を提供すること。
【解決手段】 車両挙動制御装置1は、車両の横力を、スリップ角及び接地荷重の少なくとも一方を変数とした非線形の関数として演算し、その演算した横力と、少なくとも車両のロール角、ヨー角、上下変位と、に基づいて車両におけるロール振動の発生の有無を判断すると共に、その判断の結果ロール振動が発生すると判断された場合、ロール振動を抑制する。
(もっと読む)
車両用衝突判定装置
【課題】自車の横方向に加速度が発生する走行状態の場合にも、前方物体との衝突の危険度を正しく表すことができる指標を用いて、前方物体との衝突の危険度を判定する車両用衝突判定装置を提供する。
【解決手段】自車両の横加速度の現在値Gy_pの増加に伴い、その値が増加する衝突危険度指標TTC_gyを用いて、前方物体と自車両との衝突の危険度を判定する。
(もっと読む)
車両用走行制御装置
【課題】トライバの好みに応じた横加速度に設定する。
【解決手段】前方道路のカーブ状態と横加速度設定値とに基づいて前方道路のカーブにおける目標車速を演算し、この目標車速に基づいて目標減速度を演算して車両の減速制御を行う車両用走行制御装置において、横加速度設定値を切り換える横加速度切り換え手段を設け、横加速度設定値を横加速度切り換え手段により切り換えられた値に変更する。
(もっと読む)
車両運動の安定化制御装置
【課題】 強いオーバーステア特性により高い旋回性能を得つつ、安定限界速度以上の車速において、車両の旋回特性および直進性の安定化を図ることができる車両運動の安定化制御装置を提供する。
【解決手段】 車速が安定限界速度Vc以上の場合、左右駆動力差に対して、運動特性の不安定性を補償するための安定化フィードバック操作代usを設定する安定化フィードバック操作代演算部105と、安定化フィードバック操作代usの範囲内で、ヨーレートγをフィードバック制御で安定化するための安定化フィードバック操作量uFBを設定するF/B指令部108と、安定化フィードバック操作量uFBの限界量(ulmax,urmax)に対して、安定化フィードバック操作代usを確保した上で、車両を安定に走行させるための安定化フィードフォワード操作量uFFrl,uFFrrを設定するF/F指令部107と、を有する。
(もっと読む)
車輪位置特定装置
【課題】車輪位置特定装置において、車体側の車輪速センサからの検出結果を使用することなく、車輪側の回転状態センサからの検出結果のみを使用して車輪の車輪位置を短時間かつ確実に特定する。
【解決手段】車輪位置特定装置は、各ホイールシリンダのうち少なくとも一つに油圧変動を発生させ(ステップ406)、各車輪にそれぞれ設けられた回転状態センサから取得した車輪の各回転状態に基づいて油圧変動に対する応答の有無をそれぞれ取得し(ステップ408)、各ホイールシリンダへの油圧変動の有無と取得した応答の有無の組み合わせから各車輪と各ホイールシリンダとを関連付ける(ステップ410)。
(もっと読む)
車両制御装置および車両制御方法
【課題】運転者の心理状態(感情)を総合的に判断し、判断結果に基づいた車両制御を行なうこと。
【解決手段】自車両状態検知部12が自車両の状態を検知し、感情推定部16が自車両の状態から運転者の感情を推定する、もしくは自車両が特定の状態となった場合に、生体状態監視部13が取得した情報を用いた感情推定を起動することで、運転者の心理状態を総合的に判断し、制御内容決定部15による運転者への通知制御と、車両の挙動制御へ反映させることで、積極的に事故などを防止する。
(もっと読む)
電動パーキングブレーキシステム
【課題】電動パーキングブレーキ機構の作用中に、制動トルク不足が生じ難くする。
【解決手段】S33において、傾斜角度と、シフト位置とから移動力対応目標張力が決定され、S34において、傾斜角度と、シフト位置とから緩み補填量が取得され、S35において、これらの和である緩み対応目標張力と出力可能な最大値との小さい方が、制御用目標張力とされる。そして、S40〜43において、ケーブルの張力が制御用目標張力(たいての場合は、緩み対応目標張力となる)となるように電動モータが制御される。このように、パーキングブレーキの作動時に、張力がケーブルの緩みを考慮した大きさに制御されるため、その後、パーキングブレーキの作用中に、制動トルク不足が生じ難くすることができ、増し引きが行われ難くすることができる。
(もっと読む)
41 - 60 / 532
[ Back to top ]