
Fターム[3D046HH25]の内容
ブレーキシステム(制動力調整) (22,399) | 検出対象及び検出手段 (8,844) | 車体状態 (2,543) | 車体加減速度 (903)
Fターム[3D046HH25]の下位に属するFターム
車体前後方向 (371)
Fターム[3D046HH25]に分類される特許
161 - 180 / 532
ブレーキ制御装置
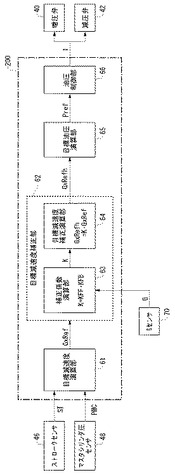
【課題】良好なブレーキフィーリングを実現する。
【解決手段】ブレーキ制御装置は、ペダルストロークSTおよびマスタシリンダ圧PMCに基づいて演算された目標減速度GxRefに、フィードフォワード制御則およびフィードバック制御則に基づく補正を行う。特に、フィードフォワード項KFFにブレーキパッドの状態に基づいて学習した効き計測補正項が用いられるため、フィードバック制御におけるブレーキ装置の構成要素の経年劣化等の影響が少なくなる。したがって、制御量のハンチングを防止または抑制することができる。また、フィードフォワード項KFFを加味しながらフィードバック制御が継続的に実行されるため、制御の追従性を保持することもできる。その結果、ブレーキ装置の構成要素の経年劣化等に起因する外乱があっても、制御系の安定性を保持して良好なブレーキフィーリングを保持することができる。
(もっと読む)
車線逸脱防止装置

【課題】制動力制御を行う車線逸脱防止装置と制動力制御を行う他の走行制御装置とを併用する場合でも、両装置の制御の両立を図ることができるようにする。
【解決手段】車線逸脱防止装置は、走行車線に対した自車両が逸脱傾向にあると判定した場合(ステップS4、ステップS5)、走行制御として、自車両の制動力を制御して走行車線に対する自車両の逸脱を回避する車線逸脱防止制御を行う(ステップS6〜ステップS8)。ここで、制動力制御を行うCOPが作動可能性あり(作動可能性が高い)と判定した場合、逸脱傾向判定用しきい値XLを補正し、逸脱傾向ありと判定し易くなるように車線逸脱判定を補正する(ステップS3)。
(もっと読む)
車両用制動力制御装置
【課題】この発明は、障害物との接触を避けるための制動力を低減するときに、旋回性能に悪影響を与えることがなく、操縦性を向上させることができ、障害物を回避するための制動力制御と、高い操縦性とを両立することを目的とする。
【解決手段】この発明は、障害物検知手段と、障害物との接触が避けられるかどうかを判定する判定手段と、障害物との接触予測時間を算出する予測時間算出手段と、接触予測時間まで、車両を一定の制動力で制動する制動力制御手段とを備えた車両用制動力制御装置において、ステアリングの操舵量を検出する操舵量検出手段を備え、接触予測時間を経過した場合には、制動力が低減時間内にゼロになるように徐々に低減する制動力低減制御手段を備え、操舵量に応じて、低減時間の値を変化させる低減時間補正手段を備えている。
(もっと読む)
車両の挙動制御装置
【課題】 車両諸元が車両モデルを構築したときの車両諸元と相違した場合に、車両挙動制御が早期に開始されたり、車両挙動制御により発生させられるヨーモーメントが大きくなることを防止する車両挙動制御装置を提供すること。
【解決手段】 車両挙動制御装置は、目標ヨーレートと実ヨーレートとの偏差であるヨーレート偏差Yrerrの大きさが不感帯deadzone以上であるとき、ヨーレート偏差Yrerrに基づいて車両旋回状態制御量VFを算出する。車両挙動制御装置は、車両が直進走行状態にあるときの操舵角θから操舵角ズレθerr(実タイヤ切れ角偏差に相当)を取得する。そして、車両挙動制御装置は、操舵角ズレθerrの大きさが大きいほど不感帯deadzoneを大きくする。更に、車両挙動制御装置は、車両旋回状態制御量VFの大きさを操舵角ズレθerrの大きさに応じて変更する。
(もっと読む)
車線逸脱防止装置
【課題】自車両が停止を要する走行シーンを考慮して車線逸脱防止制御を行う。
【解決手段】車線逸脱防止装置は、走行車線に対した自車両が逸脱傾向にあると判定した場合(ステップS3、ステップS4)、自車両の制動力を制御して走行車線に対する自車両の逸脱を防止する車線逸脱防止制御を行う(ステップS7〜ステップS11)。ここで、自車両の停止の必要性が高いエリアまでの距離情報を検出し(ステップS6)、その検出した距離情報に基づいて、車線逸脱防止制御の制御内容を変更する(ステップS11)。
(もっと読む)
車両用自動ブレーキ制御装置
【課題】玉突き事故の拡大の回避を図るとともに、後方車両の追突により自車の受ける衝撃を低減することができる車両用自動ブレーキ制御装置の提供。
【解決手段】自車Bの前方に前方車両Aが位置し、かつ後方に第1後方車両Cが位置する場合において、第1後方車両Cが、更に後方から走行してきた第2後方車両Dに追突されたときに、第1後方車両Cへの第2後方車両による追突発生又は追突予知信号を受信する車車間通信用送受信アンテナ8と、自車Bの車速を検出する車速センサ2と、自車Bのブレーキ圧を制御するECU6とを備え、ECU6は、第1後方車両Cへの追突発生又は追突予知信号を受信し、かつ、自車Bの車速が基準速度以下である場合に、ブレーキ圧を第1圧力まで上昇させ、自車Bへの追突後、ブレーキ圧低下条件が成立すると、ブレーキ圧を第2圧力に低下させ、ブレーキ圧再上昇条件が成立すると、ブレーキ圧を第1圧力に再上昇させる。
(もっと読む)
制動力制御システム
【課題】車両の制動性能及び制動信頼性をより高めた制動力制御システムを実現する。
【解決手段】制動力制御システムは、車輪速センサ14a,14bの検出値に基づきフロント制動装置12a,12bを駆動制御するフロント演算装置16と、車輪速センサ14c,14dの検出値に基づきリア制動装置12c,12dを駆動制御するリア演算装置18とを備え、フロント演算装置16とリア演算装置18は、通信ライン20を介して相互に接続されるものとし、フロント演算装置16は、リア演算装置18の制御対象車輪に対応する車輪速センサ14c,14dの検出値に基づいた車輪速情報又は車体速度情報を通信ライン20から取得し、その取得情報に基づき自己の制御対象車輪のフロント制動装置12a,12bを駆動制御する。
(もっと読む)
車両制動距離予測装置および車両制動距離予測方法
【課題】走行中の車両の制動距離について定量的に予測することができる、車両制動距離予測装置および車両制動距離予測方法を提供する。
【解決手段】車両が走行している最中の、タイヤの所定部位の時系列の加速度データを取得し、所得した前記加速度データから、タイヤの変形に基づく加速度成分を除去して、タイヤの変形に基づく加速度成分が除去された、変形成分除去後加速度データを周波数分析して周波数スペクトルを求め、周波数スペクトルの積算値を求めるとともに、求めた前記積算値に基づいて、制動距離を予測するための制動距離パラメータを算出し、算出された前記制動距離パラメータに基づいて、車両の制動距離の予測値を求める。
(もっと読む)
自動車ブレーキ装置
【課題】バキュームポンプで発生させた負圧でブレーキ倍力装置を作動させて制動力を発生させる自動車ブレーキ装置において、バキュームポンプの駆動を電動モータを使わずに行って車載のバッテリに蓄えられた電力の消費低減を図ることを課題としている。
【解決手段】バキュームポンプ10とブレーキ倍力装置2を有し、前記バキュームポンプ10が回転する車軸又は車軸以外の回転軸により駆動され、そのバキュームポンプ10から供給される負圧でブレーキ倍力装置2が作動するようにした。
(もっと読む)
車両の状態推定及び制御装置
【課題】 路面摩擦係数の影響がヨーレイトなどの車両挙動として現れる前に、車両状態を推定可能とする車両の状態推定及び制御装置を提供する。
【解決手段】 第1のタイヤ横力和演算手段と、タイヤすべり角検出手段と、輪荷重推定手段と、制駆動反力推定手段と、推定輪荷重と推定制駆動反力とタイヤすべり角と路面摩擦係数に基づき、路面摩擦係数を演算する第2のタイヤ横力和演算手段と、路面摩擦係数の探索範囲を設定する探索範囲設定手段と、探索範囲中であって第2のタイヤ横力特性演算手段にもとづき演算される第2のタイヤ横力和の中から、第1のタイヤ和横力演算手段に基づき演算される第1のタイヤ横力和との差が小さくなる条件をみたす、第2のタイヤ横力和を探索する探索手段と、第2のタイヤ横力和から推定路面摩擦係数を推定する推定路面摩擦係数推定手段とを備えることとした。
(もっと読む)
車両挙動推定予測装置および車両安定化制御システム
【課題】複数の車両挙動を表す量をその特徴を反映させながら次元圧縮することで、ニューラルネットワークへの入力数の低減し、精度良く車両挙動を表す量を推定し予測することが可能な車両挙動推定予測装置およびそれを用いた車両安定化制御システムを提供する。
【解決手段】車両挙動推定予測装置1は、測定装置Sにより測定された複数の車両挙動を表す量に関するデータを砂時計型ニューラルネットワークinSNNを用いて次元圧縮させ砂時計型ニューラルネットワークinSNNの圧縮層L3からの出力を特徴量f1として抽出する特徴量抽出手段2と、抽出された特徴量f1に基づいて現在の車両挙動を表す量の推定値または一定時間後の車両挙動を表す量の予測値を出力するニューラルネットワークRNNで構成された演算手段3とを備える。
(もっと読む)
車両の障害物検知装置
【課題】レーダ装置1の位置推定部4bが、曲率半径推定部11aにより推定された、自車両の進行路の曲率半径を入力しかつ該曲率半径に基づいて、検知した障害物の所定時間後の位置を推定するとともに、その推定された曲率半径が、予め設定された所定曲率半径よりも小さいときには、該所定曲率半径に基づいて上記障害物の上記所定時間後の位置を推定する場合に、障害物の所定時間後の位置を正確に推定できるようにする。
【解決手段】上記所定曲率半径を、自車両の最小回転半径と略同じ値(特に5mが好ましい)に設定する。
(もっと読む)
車両姿勢制御装置
【課題】制動時の車体の浮き上がりやノーズダイブを抑制することにより、車両の姿勢が良好となるようにする。
【解決手段】理想制動力配分特性線に基づいて設定された前後輪FL〜RRそれぞれの制動力配分の関係を示す実制動力配分特性線として、任意の減速度を発生させる場合において、実制動力配分特性線上の制動力配分とした場合と理想制動力配分特性上の制動力配分とした場合を比べて、実制動力配分特性線上の制動力配分とした場合における前輪FL、FRの制動力配分の比率が、理想制動力配分特性上の制動力配分とした場合における前輪FL、FRの制動力配分の比率よりも低くされたものを用いる。この実制動力配分特性線に基づいて減速度に対応する前後輪FL〜RRそれぞれの制動力配分を求めることで、制動力配分に応じた前輪FL、FRのW/C圧と後輪RL、RRのW/C圧を設定する。
(もっと読む)
車両のクルーズコントロール装置
【課題】ドライバの操作に基づいてクルーズコントロールの解除が的確に行われる車両のクルーズコントロール装置を提供する。
【解決手段】前走車との車間距離を維持するクルーズコントロールを行う車両のクルーズコントロール装置において、クルーズコントロール時に検出される前走車との車間距離に応じて制御減速度を算出する制御減速度算出手段(ステップ2)と、検出されるフットブレーキペダルの踏み込み量に応じて操作減速度を算出する操作減速度算出手段と、制御減速度と操作減速度のうち常に大きい減速度を選択して車両の制動を行う車両制動手段(ステップ7)と、フットブレーキ踏み込みを検出したら、所定の短時間、制御減速度をフットブレーキ踏み込みからの経過時間に応じて減少させてからクルーズコントロールを解除するクルーズコントロール解除手段(ステップ5、6)とを備えた。
(もっと読む)
脇見運転防止装置
【課題】後退時に適切に脇見運転を判定して運転者への警報を行うことができる脇見運転防止装置を提供すること。
【解決手段】本発明に係る脇見運転防止装置1は、運転者の顔又は視線の方向が所定の範囲内に第一の期間あれば脇見運転であると判定する脇見運転防止装置であって、
前記所定の範囲を車両の前進時と後退時とで異ならせる範囲変更手段3を有することを特徴とする。
(もっと読む)
車両制御装置
【課題】自車両の周辺物体との衝突や車線外/道路外への逸脱が適切に回避される車両制御装置を提供すること。
【解決手段】車両において、自車両の挙動を安定化させる制御を行う車両制御装置に、自車両の車両状態を監視し、横滑りが発生したときに当該横滑りが抑制されるように自車両を制御する横滑り抑制手段と、自車両周辺の環境を監視し、当該周辺環境(周辺物体との衝突可能性や車線逸脱可能性)に応じて横滑り抑制手段による横滑り抑制のための車両制御の内容(制御量又は制御開始タイミング)を変更する(衝突可能性/車線逸脱可能性が高いほど制御量を小さくする又は制御開始タイミングを遅らせる)制御内容変更手段とを備える。
(もっと読む)
車両挙動制御装置および車両挙動制御方法
【課題】 路面カントが大きく変化し、ヨーモーメントは不変のまま横加速度のみが大きく変化した場合でも、車両挙動の安定化を図ることができる車両挙動制御装置および車両挙動制御方法を提供する。
【解決手段】 車両進行方向に対し直角方向の路面傾斜である路面カントを推定する路面カント推定手段と、少なくとも横加速度Ygrを含む車両の走行状態を検出する走行状態検出手段B2と、走行路から路面カントの大きな路肩へ車線逸脱した場合、車両の走行状態に応じて、車両の横加速度が最大許容値Ygl以下となるように、各車輪に付与する制動力を制御する逸脱後制動力制御手段B4-3と、を備える。
(もっと読む)
自動制動制御装置
【課題】トラクタトラックなどの牽引車における自動制動制御を実現する。
【解決手段】対象物と自車との相対距離および相対速度とに基づき導出されるTTCが設定値を下回ったときに自動的に、時系列的に複数段階にわたり制動力または制動減速度を徐々に増大させる段階的な制動制御を行う。さらに、制動制御時にジャックナイフィング現象が発生しないように牽引車と被牽引車との連結部の回動を段階的制動制御の少なくとも最終段階で固定する。
(もっと読む)
制動制御装置
【課題】本発明は、ブレーキ応答性と油圧脈動低減とを両立する制動制御装置を提供することを課題とする。
【解決手段】ブレーキ装置に備えられる制動制御装置であって、マスタシリンダMCとホイールシリンダWCとを連通する連通路に配置され、流動抵抗を可変とする流動抵抗可変手段3と、ブレーキ油圧の脈動を検知する脈動検知手段2とを備え、脈動検知手段2でブレーキ油圧の脈動を検知した場合、流動抵抗可変手段3により流動抵抗を大きくすることを特徴とする。
(もっと読む)
鉄道車両用ブレーキ制御システム
【課題】滑走の発生を低減させることにより制動距離を短くし車輪踏面の損傷を低減する鉄道車両用ブレーキ制御システムを提供する。
【解決手段】機械ブレーキ力に応じて制御対象となる第2の車軸のそれぞれにブレーキ力を生じさせる複数のブレーキ制御手段と、各第2の車軸に関する滑走度合をそれぞれ推論し滑走防止弁の開閉制御を行う複数の滑走防止制御手段と、編成全体で必要なブレーキ力のうち上記複数のブレーキ制御手段が生じさせるべき不足ブレーキ力を算出し、上記複数のブレーキ制御手段のそれぞれで分担する機械ブレーキ力を決め機械ブレーキ指示をする編成ブレーキ制御手段とを備えるブレーキ制御システムであって、上記編成ブレーキ制御手段が、上記決定された各ブレーキ制御手段の分担する機械ブレーキ力を上記複数の滑走防止制御手段により推論された滑走度合に基づいて前記不足ブレーキ力を満たすように動的に変更する変更手段を備える。
(もっと読む)
161 - 180 / 532
[ Back to top ]