
Fターム[3D052DD03]の内容
非転向輪、付随車の操向、その他の操向 (4,525) | 車種 (408) | 農業車両 (327)
Fターム[3D052DD03]の下位に属するFターム
Fターム[3D052DD03]に分類される特許
1 - 20 / 160
作業機
作業車両
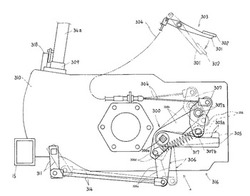
【課題】旋回に連動して切状態となる旋回内側のサイドクラッチの切状態の解除操作機構をコンパクトに構成し、広い取付スペースを必要としない作業車両を提供する。
【解決手段】走行車体に走行装置を設け、走行装置への駆動力を入切する切替伝動装置300を入切操作する操作部材305を設け、走行車体を操向操作する操舵部材を旋回操作すると切替伝動装置300を操作部材305を介して切操作する旋回連動機構Aを設けた作業車両において、旋回連動機構Aと操作部材305の間に旋回連動状態を解除する解除操作部材307を設けると共に、この解除操作部材307を旋回連動状態と連動解除状態に切り替える解除切替部材303を設けて構成する。
(もっと読む)
乗用型作業機

【課題】乗用型作業機の旋回時の走行速度を自動的に減速するための構成を簡略化すること。
【解決手段】ステアリングハンドル31と、エンジン11と、該エンジン11の動力を走行用の駆動輪14,14に伝達する油圧式無段変速機62と、該油圧式無段変速機62を変速操作をするようにスイング動作が可能な操作レバー71と、を備えた乗用型作業機10である。操作レバー71のスイング基部71aには、戻し機構90が設けられている。該戻し機構90は、操作レバー71によって変速操作されている油圧式無段変速機62の変速状態を、ステアリングハンドル31による旋回操舵時に減速する方向に戻す。
(もっと読む)
作業車両
【課題】
旋回時に駆動力の切れる走行装置に駆動力を供給する状態とする操作装置を設け、旋回時の走行が停滞することのない作業車両を提供する。
【解決手段】
走行装置11,11と伝動切替装置300を走行斜体2に左右一対設け、走行車体2を左右方向に旋回操作する操作部材34を設け、操作部材34の操作に連動して旋回内側の伝動切替装置300を「切」側に作動させる旋回連動機構307を設け、旋回連動機構307と切替部材305を連結する連動操作機構317を設け、伝動操作部材303を設け、伝動操作部材303と切替部材305を連繋操作部材304で連結して構成する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、キャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることできること。
【解決手段】傾斜横切り走行時に発生する目標走行と実走行との走行方向ずれを、車両の傾斜度に基づいて、解消するようにキャスタ輪の操向角を制御する。
(もっと読む)
作業車
【課題】走行状態指令手段の指令情報に基づいて、定格領域を越えるような出力制限領域にて制御指令用速度及び制御指令用駆動トルクが指令された場合であっても、操作者が意図した旋回走行が行うことが可能となる作業車を提供する。
【解決手段】左右の走行装置を夫々独立に走行駆動する一対の電動モータ11R,11Lの作動を制御する制御手段23が、各電動モータ11R,11Lについて求めた目標速度と各電動モータ11R,11Lの回転速度とに基づいて求めた制御指令用速度及び制御指令用駆動トルクが出力制限領域にあるときは、走行状態指令手段にて指令されている車体の旋回状態に対応する速度差を維持し、且つ、定格領域に戻るように、制御指令用速度及び制御指令用駆動トルクを補正する。
(もっと読む)
自走車両
【課題】操縦操作に基づいて制御量を生成する制御ユニットと、自由操向可能なキャスタ輪と、制御指令により互いに独立して駆動制御される第1駆動部及び第2駆動部と、第1駆動部によって走行駆動される左駆動輪及び第2駆動部によって走行駆動される右駆動輪とを備えた自走車両において熟練を要せずに傾斜面を駆動走行しながら自在に横切ることができること。
【解決手段】第1・第2駆動部に要求される必要駆動トルクを算出する駆動トルク算定部と、傾斜横切り走行時における目標走行方向と実走行方向との方向ずれを解消する補償トルクを第1・第2駆動部に対して車両の傾斜度に基づいて算出する補償トルク算定部と、必要駆動トルクと補償トルクとに基づいて制御量を補正する補正部とが含まれている。
(もっと読む)
作業車両
【課題】単一のブレーキぺダルを備えた作業車両において、路上走行を安全にしながら、圃場作業時にはエンジンの回転数、ステアリングハンドルの操作位置状態から自動的に旋回走行する装置を提供する。
【解決手段】アクセルレバーにより回転数を調節できるエンジンと、該エンジンの回転数を検出するエンジン回転数センサと、ステアリングハンドルの操作状態を検出するハンドル切れ角センサとを設け、前記エンジン回転数センサが所定の作業回転数を検出し、前記ハンドル切れ角センサが最大切れ角に対して所定比率以上のハンドル切れ角を検出すると、前記ステアリングハンドルの切り側の左右ブレーキアクチュエータ24L、24Rを作動し左右ブレーキ作動手段の左右ブレーキ作動部の一方をだけを作動し片ブレーキ作動状態で旋回走行させるコントローラを設けたことを特徴とする作業車両の構成とする。
(もっと読む)
作業車両
【課題】作業者に負担を掛けないで、ブレーキペダルの連結と非連結を容易に切り替え可能であり、作業条件に合わせた操作が行える作業車両の提供である。
【解決手段】エンジンと前輪と後輪と苗植付部と左右のサイドクラッチと左右のサイドブレーキと左右のサイドクラッチ及び左右のサイドブレーキを操作可能な左右のブレーキペダル130と副変速レバーと副変速レバーセンサとを設けた走行車両に、左右のブレーキペダル130を連結又は非連結に切り替える切替装置140と、副変速レバーが高速時に切替装置140を作動して左右のブレーキペダル130を連結させる制御装置とを設ける。高速の直進走行時には、左右のブレーキペダル130が連結するため、停止操作が容易に行える。一方、低速時には、左右のブレーキペダル130が連結しないため、作業条件に合わせた操作が行える。
(もっと読む)
作業車両
【課題】操向位置を検出する検出センサをシンプルな構成で容易に走行機体側へ設置できるとともに、設置した検出センサが圃場から飛散した泥水等の付着によって故障することを防止できる作業車両を提供することを課題としている。
【解決手段】操向位置を検出する検出センサ48を備えた作業車両であって、ステアリングシャフト33の回転を減速して前記検出センサ48に伝える減速機構47を、該ステアリングシャフト33に設け、検出センサ48からのステアリングシャフト33の回転によって、操向位置を検出する。
(もっと読む)
作業車両
【課題】土質の柔らかい圃場での旋回走行が円滑に行える作業車両を提供すること。
【解決手段】前輪3と後輪4を有する機体2と、前輪へのデファレンシャル機構を切り替えるデフロック機構170と、デフロック機構170を制御するデフロック制御機構200aと、後輪の上下位置を変更するための圧縮スプリングと後輪伝動ケース111と回動軸部112等とを備えた苗移植装置1であって、圧縮スプリング及び後輪伝動ケース111等を作動させる後輪車高調整用シリンダーモーター110と、デフロック機構170の作動を検出する前輪デフロックペダル操作検出スイッチ150と、そのスイッチ150が前記作動を検出した場合、後輪車高調整用シリンダーモーター110を作動させて機体2の車高を変更する車高変更制御機構200bとを備えた作業車両である。
(もっと読む)
走行車両
【課題】 本発明の課題は、8条植えなどの多条植え用であっても適切な位置で苗の植え付けができる旋回連動制御装置を備えた乗用型作業機などの走行車両を提供することである。
【解決手段】 走行車両において、ステアリング機構に連動して旋回内側の走行推進体の駆動力を断つか制動する旋回連動機構と、走行推進体の伝動軸回転数検出手段と、走行車体の旋回時に、伝動軸回転数検出手段の検出による左右の走行推進体の回転数に基づき、旋回内側の走行推進体の回転数が旋回外側の走行推進体の回転数よりも小さい該旋回外側の走行推進体の回転数の所定値以下になれば、旋回内側の走行推進体を駆動することにより、旋回内側の走行推進体を駆動する状態と旋回内側の走行推進体の駆動力を旋回連動機構により断つか制動する状態を繰り返す断続的制御を実行する制御装置を備えた。
(もっと読む)
乗用作業車
【課題】車体の走行に伴って車体周囲の作業対象物に対する作業を行う電動式作業デバイスの電力消費を抑制する制御を実装された乗用作業車の提供。
【解決手段】乗用作業車は、運転座席を備えた車体と、当該車体を支持する駆動車輪ユニットと、作業デバイスを有する作業ユニットを駆動するための作業用電動機と、作業用電動機を定常モード又は当該定常モードより消費電力が少ない省電力モードで動作制御する電動機制御部と、作業用電動機の負荷を評価する作業負荷評価部とを備えている。作業負荷評価部によって評価された作業用電動機の負荷がしきい値より低い低負荷である場合に、電動機制御部は作業用電動機を省電力モードで動作させる。
(もっと読む)
作業車
【課題】左右の走行車輪を一対の電動モータにて夫々独立に走行駆動し且つ夫々独立で左右の走行車輪に対する変速操作を行うようにしながらも、走行安定性を向上することが可能な作業車を提供する。
【解決手段】直進並びに旋回走行を現出可能な状態で左右の走行車輪2,2を夫々独立に走行駆動する一対の電動モータ11R,11Lと、夫々独立で左右の走行車輪2,2に対する変速操作を行う左右一対の変速操作具12R,12Lと、作動を制御する制御手段23とが備えられ、制御手段23が、変速操作具12R,12Lの操作位置が左右で異なるときは、各電動モータ11R,11Lの夫々に対する目標速度を、それらの速度差が各変速操作具12R,12Lの操作位置の差に対応する速度差よりも設定量だけ小さくなる状態で設定して各電動モータ11R,11Lの作動を制御する。
(もっと読む)
作業車両
【課題】作業車両の傾斜地での直進走行性能を向上できるようにする。
【解決手段】左右の走行駆動輪11・12と、左右の走行駆動輪11・12の前方または後方に配置される補助輪(キャスタ輪13・14)と、前記左右の走行駆動輪11・12をそれぞれ回転駆動する左右一対の電動モータ15・16と、左右の走行駆動輪11・12の回転速度をそれぞれ検出する回転速度検出手段(回転速度センサ17・18)と、進行方向及び車速を設定する操行手段となる旋回レバー21・22と、作業車両に発生するヨーレイトを検出するヨーレイトセンサ25と、前記操行手段より算出された目標ヨーレイトになるように前記左右電動モータ15・16の回転数を変速してヨー制御する制御装置50を備える作業車両において、操行手段で設定した進行方向が設定角度以内の直進走行の場合のみ、ヨー制御を行うようにした。
(もっと読む)
作業車両
【課題】ブレーキバルブに作動油を補充するためのリザーバタンクおよび当該リザーバタンクの代わりとなる油室を設ける必要のない作業車両を提供する。
【解決手段】変速用の第一変速クラッチ41、第二変速クラッチ42および第三変速クラッチ43(油圧クラッチ)の断接を切り換えるクラッチバルブ30と、左ブレーキペダル14Lおよび右ブレーキペダル14R(ブレーキ操作具)の操作に応じて左ブレーキ70Lおよび右ブレーキ70R(油圧ブレーキ)への作動油を給排出して、前記油圧ブレーキの動作を切り換えるブレーキバルブ60と、クラッチバルブ30とブレーキバルブ60とを接続するとともに、クラッチバルブ30から漏れた作動油をブレーキバルブ60に補充するチャージ油路50と、を具備した。
(もっと読む)
移動農機
【課題】圃場での作業に合わせて容易にステアリング可能な移動農機を提供する。
【解決手段】ステアリングハンドルの操舵範囲を複数の領域に分割して形成し、主に機体を旋回させる際に使用される旋回領域Bでは、ステアリングハンドルの操舵量に対する前輪の操向量の比率を、この旋回領域よりも操舵角の小さな領域である方向修正領域よりも大きく設定する。これにより、作業者は直進時には、ステアリングハンドルを方向修正用域で操舵して機体の方向を微調整すると共に、旋回時には、ステアリングハンドルを旋回領域まで操舵して、少しの操舵で機体を旋回させる。
(もっと読む)
セミクローラ型走行車両
【課題】操縦者に負担を掛けないで圃場内を容易に旋回できるセミクローラ型の走行車両を提供すること。
【解決手段】2駆・4駆の切替が自在なギア変速装置43と2駆方式と4駆方式の駆動方式の切替機能を含めた走行モード切替ダイヤル87又は89を設けており、該ダイヤル87,又は89により4駆方式で前輪14が増速駆動されるモードが選択されると、さらに車両が旋回操作されるとギア変速装置43が旋回内側の前輪14とクローラ式走行装置7をポンピングブレーキ機能により駆動させる制御装置100を備えているので、旋回時に圃場が荒れることなく、走行性が従来より向上したセミクローラ型走行車両が得られる。
(もっと読む)
農業用作業車両
【課題】簡単な構成で旋回操作の開始及び終了を検出することが可能な農業用作業車両を提供する。
【解決手段】サイドクラッチ操作機構45は、ステアリングハンドル7が所定の操作量以上操作された場合に、サイドクラッチを切断する。クラッチセンサ49L,49Rは、サイドクラッチの作動状況を検出可能である。制御部は、植付部を昇降駆動するための昇降シリンダの駆動を制御する。植付クラッチは、植付部に対する駆動力の伝達の有無を切換可能である。また、前記制御部は、植付部の作動中において、植付クラッチの切断、サイドクラッチの切断、及び後進操作を、旋回時自動昇降制御の開始トリガとして検出可能である。そして、前記制御部は、開始トリガのうち何れか1つを検出すると、植付部を上昇させ、その後、前記サイドクラッチの接続を検出すると、植付部を下降させる。
(もっと読む)
乗用田植機
【課題】所望の箇所で正確に苗植付装置を下降可能な乗用田植機を提供する。
【解決手段】制御部50が、旋回時前期にて、植付クラッチ51、サイドクラッチ55をこの順に切り、旋回時後期にて、サイドクラッチ55、植付クラッチ51をこの順に入れる。そして、エンジン12から後輪17へ駆動力の伝達するための出力軸EOをサイドクラッチ55の上流側に備え、後輪17の回転数を検出する回転センサ54を出力軸EOに設け、旋回時後期にて、植付クラッチ51を入れるタイミングを、旋回時における植付クラッチ51を切ってからサイドクラッチ55を切るまでの間の回転センサ54の回転数と既定の回転数との和に基づいて制御部50が決定する。
(もっと読む)
1 - 20 / 160
[ Back to top ]