
Fターム[3D232DA16]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 操舵の状態 (8,167) | ステアリング伝達比 (201)
Fターム[3D232DA16]に分類される特許
1 - 20 / 201
インホイールシステムを用いた車両制御方法
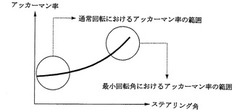
【課題】 車両の旋回安定性を確保しながらも、回転半径を最小化させることのできるインホイールシステムを用いた車両制御方法を提供する。
【解決手段】車両の各ホイールの内部にモータを装着して制御するインホイールシステムを用いた車両制御方法において、車両走行情報を基に車両の旋回モードを判断するステップと、旋回モードに対する車両の現在のアッカーマン率を計算するステップと、現在のアッカーマン率を基に制御命令を生成するステップと、制御命令を用いて各ホイールのモータをそれぞれ制御するステップと、を含むことを特徴とする。
(もっと読む)
電動パワーステアリング装置の制御装置

【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
操舵制御装置
【課題】小型かつ軽量で構成部材の破損を防止可能な操舵制御装置を提供する。
【解決手段】ECU40は、操舵角センサ31により検出した操舵角に基づき基準伝達比を算出する。ECU40は、算出した基準伝達比をラック6の位置に基づき補正することで補正伝達比を算出する。具体的には、ECU40は、ラック6が移動可能範囲の一端近傍の所定の第1位置から前記一端側へ移動するに従い、または、ラック6が移動可能範囲の他端近傍の所定の第2位置から前記他端側へ移動するに従い前記基準伝達比の値がより小さくなるよう補正することで補正伝達比を算出する。ECU40は、ラック6の位置に基づき前記基準伝達比または前記補正伝達比のいずれかを伝達比として決定する。ECU40は、決定した伝達比に基づき第1アクチュエータ22の駆動を制御する。
(もっと読む)
作業車
【課題】農作業等の作業性を向上させることができる作業車を実現する。
【解決手段】電動モータの回転を制御して、ステアリングハンドルの操作量に対応するステアリング装置の入力軸の操作量の比であるステアリングレシオを変更可能な可変レシオモードと、電動モータの回転を制御して、予め設定された設定位置又は設定方向に沿って走行機体を自動操向させる直進モードとを実行可能な制御装置を備えている。
(もっと読む)
車両の挙動制御装置
【課題】自動操舵制御からドライバ操舵への切り替え時における違和感の発生を防止する。
【解決手段】ドライバの操舵から独立して車両状態量を変化させることが可能な少なくとも一つの装置を備えた車両において、車両の挙動制御装置は、前記少なくとも一つの装置のうちの少なくとも一つである対象装置を介して、前記車両状態量を目標状態量に収束させるための自動操舵制御を実行する自動操舵制御実行手段と、ハンドル角を検出するハンドル角検出手段と、前記自動操舵制御がドライバの操舵に応じたドライバ操舵へ切り替わる場合に、前記ドライバ操舵において前記ハンドル角と相関する一の前記車両状態量について、前記自動操舵制御により生じた第1状態量と、前記検出されたハンドル角に対し生じるべき第2状態量とが一致するように、前記少なくとも一つの装置を制御する状態量一致化手段とを具備する。
(もっと読む)
車両用情報処理装置
【課題】簡易な構成で現在位置よりも先の車両位置における車両の旋回曲率を推定する。また、望ましくは推定された旋回曲率を車両挙動の安定化に利用する。
【解決手段】車両(1)に搭載される車両用情報処理装置(100)は、操舵入力に対応する操舵入力情報、旋回状態を規定する車両状態量及び車速に基づいて、前記車両の将来位置を算出する将来位置算出手段と、前記算出された将来位置を少なくとも一つ含み、且つ前記車両の現在位置に対応する車両位置を含む、前記車両に係る三以上の車両位置に基づいて、前記現在位置よりも先の暫定走行位置における前記車両の旋回曲率を推定する推定手段とを具備する。
(もっと読む)
ヨーレート推定装置及びそれを用いた車両姿勢制御装置
【課題】ヨーレートセンサに頼らずにヨーレートを推定し、ヨーレートセンサが故障したときでも、車両姿勢制御を継続可能にする。
【解決手段】電動モータ20に流れる電流を検出し、検出された値に基づき、軸力Fを推定する。予め設定され記憶された軸力及び横加速度の関係に、前記推定された軸力を適用して、横加速度Gを推定し、このに推定された横加速度Gを用いて、車両のヨーレートを推定する。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
車両制御装置
【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
車両の挙動制御装置
【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
車両運動制御装置
【課題】より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定する。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させる。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
(もっと読む)
車両用操舵装置
【課題】伝達比可変機構の動作によって生じる操舵反力を測定するために用いられるトルクセンサが不要となり、トーションバーが不要となる車両用操舵装置を提供する。
【解決手段】目標act角演算部51は、act角θactの目標値である目標act角θact*を演算する。制御信号出力部52は、目標act角演算部51によって演算された目標act角θact*に基づいて、伝達比変更用モータ20の駆動回路29を制御する。目標反力補償角演算部61は、目標act角演算部51によって演算された目標act角θact*が零でない場合には、目標act角θact*に基づいて反力補償用モータ25の目標回転角である目標反力補償角θrec*を演算する。制御信号出力部62は、目標反力補償角演算部61によって演算された目標反力補償角θrec*に基づいて、反力補償用モータ25を制御する。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則し且つ運転者の操舵操作の速さを考慮した目標軌跡に沿って車両が走行するよう車両の走行を制御する。
【解決手段】舵角可変装置又はバイワイヤ式の操舵装置を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S200、300)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算する。また車両の軌跡の制御を開始又は更新すべきと判定する際の運転者の操舵操作量の変化の流体圧の大きさに応じて目標舵角を補正する(S400)。そして目標舵角に基づいて操舵輪の舵角を制御する(S600)。
(もっと読む)
車両用操舵装置
【課題】伝達比を可変制御するためのモータを停止してこのモータを保護する制御を無闇に行うと、伝達比制御を行えない状態が多くなってしまう。
【解決手段】車両用操舵装置1は、入力軸18および出力軸19間の伝達比θ2/θ1を変更可能な伝達比可変機構13と、伝達比θ2/θ1を変更するための伝達比制御モータ14と、伝達比θ2/θ1を固定するためのロック機構25と、操舵制御部38とを含む。操舵制御部38は、車両100が走行する路面200と転舵輪11との間の摩擦係数を推定するμ推定・判定部49と、モータ負荷判定部50と、モード設定部51とを含む。推定摩擦係数μが基準摩擦係数μ1を超えており、かつ、伝達比制御モータ14の負荷Lが基準モータ負荷L1を超えていると判定されたとき、モード設定部51は、伝達比制御モータ14を保護するための保護モードを設定する。
(もっと読む)
車両用操舵装置および車両用操舵装置の異常判定方法
【課題】伝達比をロックするためのロック機構の異常をより正確に検出することのできる車両用操舵装置を提供する。
【解決手段】車両用操舵装置1は、ステアリングシャフト3の入力軸18と出力軸19との間の伝達比を変更可能な伝達比可変機構13と、伝達比を変更するための伝達比制御モータ14と、伝達比を固定するためのロック機構25と、制御部とを備える。ロック機構25は、キャリア57の回転を規制するためのロック部材62と、ロック部材62をキャリア57に係合する第1位置P1と係合しない第2位置P2とに変位可能に支持するソレノイド61と、を含む。制御部の判定部は、ロック部材62を第2位置P2に変位するようにロック機構25が制御された後、ロック部材62が第1位置P1にあるときに、ロック機構25に異常が生じていると判定する。
(もっと読む)
操舵制御装置
【課題】操舵制御装置において、車両挙動の安定化させつつ、車両の前後輪の操舵をより適切に制御することを可能とする。
【解決手段】操舵制御装置100は、所定の走行軌跡を走行するように操舵輪の舵角を変更可能な操舵機構200を備えた車両10の操舵制御装置であって、車両を所定の走行軌跡に追従させるための操舵輪の目標舵角を特定する特定手段240と、特定された目標舵角を、前記車両の加速度に基づいて補正する第1の補正手段100と、操舵輪の舵角が前記補正された目標舵角になるように前記操舵機構を制御する制御手段100とを備える。
(もっと読む)
車両の制御装置
【課題】ヨーレートの発生を抑制しつつ車両を目標とする運動状態に維持する。
【解決手段】前輪(FL、FR)又は後輪(RL、RR)の舵角を、該舵角の変化を促すドライバ操作から独立して変化させることが可能な舵角可変手段(400)と、前記前輪及び後輪の各々について左右制駆動力差を生じさせることが可能な制駆動力可変手段(300、600)とを備えた車両(10)を制御する装置(100)は、平行移動を実現するための、該平行移動を規定する複数の第1状態量の目標値を設定する第1設定手段と、予め設定された前記複数の第1状態量と前記舵角及び前記左右制駆動力差に夫々相関する複数の第2状態量との相対関係を規定する車両運動モデル、並びに前記設定された複数の第1状態量の目標値に基づいて、前記平行移動を実現するための前記複数の第2状態量の目標値を設定する第2設定手段とを具備する。
(もっと読む)
車両用操舵装置
【課題】伝達比可変装置の機能に制約を加えることなく当該伝達比可変装置の作動時においても良好な操舵フィーリングを実現することのできる車両用操舵装置を提供すること。
【解決手段】EPSECU18側のマイコン41には、F/Bゲイン演算部50が設けられるとともに、同マイコン41は、このF/Bゲイン演算部50が演算するフィードバックゲイン(比例ゲインKp及び積分ゲインKi)を用いた電流フィードバック制御の実行によりモータ制御信号を生成する。また、このマイコン41には、IFSECU8側(のマイコン31)において検出(演算)された転舵角速度ωtが入力される。そして、上記F/Bゲイン演算部50は、その転舵角速度ωtに応じてフィードバックゲインを可変する。
(もっと読む)
1 - 20 / 201
[ Back to top ]