
Fターム[3D232DA77]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 障害物 (662) | 他車 (219)
Fターム[3D232DA77]に分類される特許
41 - 60 / 219
車両接触回避支援装置
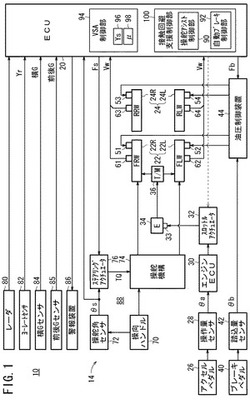
【課題】障害物との接触回避の支援制御において、路面摩擦係数を好適に推定することが可能な車両接触回避支援装置を提供する。
【解決手段】車両接触回避支援装置14の車両接触回避支援制御手段20は、左右の後輪24L、24R又は左右の前輪22R、22Lに対する制動力に基づく第1路面摩擦係数μ1と、左右の前輪22R、22L及び左右の後輪24L、24Rに対する制動力に基づく第2路面摩擦係数μ2とが異なる場合、第2路面摩擦係数μ2に基づき接触回避の支援制御を行う。
(もっと読む)
車両の制御装置

【課題】後輪操舵制御装置とアクティブサスペンション装置とを備えた車両がダブルレーンチェンジ等の速い切り返しが為される際に発生するロールの違和感を抑制する制御装置を提供する。
【解決手段】本発明は、後輪操舵制御装置10とアクティブサスペンション装置6,7とを備えた車両の制御装置12である。本制御装置は、前記車両の横加速度Gy、前輪舵角、後輪舵角、ロール角を含む運動状態量を検出する運動状態量検出手段と、前記横加速度と前記前輪舵角との相関を算出して、予め設定された標準値と比較し、横加速度修正量を算出する横加速度修正量算出手段125と、前記横加速度修正量と前記横加速度とからロール角制御量を算出するロール角制御量算出手段124と、前記ロール角制御量と前記ロール角とから前記アクティブサスペンションのロール角制御量を算出するロール姿勢制御手段126とを備えることを特徴とする。
(もっと読む)
走行制御装置
【課題】自車両の横方向の移動に関する走行制御を、先行車両の状態に応じて適切に行うことができる走行制御装置を提供する。
【解決手段】操舵制御装置1では、ECU7において先行車両位置情報に基づき操舵制御の制御量が算出され、算出された制御量で操舵制御が実行される。さらに、操舵制御装置1では、ミリ波レーダ6によって先行車両の自車両Cに対する車間距離が検出され、ECU7において、検出された車間距離に応じて操舵制御の目標制御量のゲイン値が変更される。つまり、操舵制御の目標制御量が、先行車両の状態に応じて変更される。
(もっと読む)
車両用衝突回避装置
【課題】 自車および物体の予測される衝突の態様に応じて的確な回避制御を行う。
【解決手段】 物体検知手段M1が他車を検知し、走行状態検出手段M2が自車の走行状態を検出すると、相対関係算出手段M3が自車に対する物体の相対関係を算出する。衝突可能性判定手段M4が前記相対関係に基づいて自車が他車に衝突する可能性を判定し、衝突可能性が高いと判定された場合には更に他車との衝突が予測される自車の衝突部位と、自車の移動方向および他車の移動方向が成す交差角と、自車が他車に衝突すると予測される衝突予測時刻とを算出する。衝突回避制御手段M5は、衝突予測時刻以前に前記衝突部位および前記交差角に基づいて自車の姿勢を変化させて衝突を回避するので、自車の他車に対する衝突を効果的に回避することができる。
(もっと読む)
駐車支援制御装置及び方法
【課題】 本発明は、所定の車両状態を考慮して、ステアリング制御モードを実行することができる駐車支援制御装置及び駐車支援制御方法の提供を目的とする。
【解決手段】 予め計算により定められた駐車領域に自車両を誘導するために必要な情報をドライバーに提供する情報提供モードと、前記自車両のステアリングを自動制御することにより前記駐車領域に前記自車両を誘導するステアリング制御モードとを有する駐車支援制御装置において、前記駐車支援制御装置は、判定条件1が成立するかを判定し、判定条件1が成立する場合にステアリング制御モードを実行し、判定条件1が成立しない場合に情報提供モードへの移行をドライバーに確認する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、リスクポテンシャル算出手段が、自車両の状態と、自車両周囲の障害物の状態とに基づいて、自車両周囲に存在する障害物に対するリスクポテンシャルを算出し、擬似車両挙動発生手段が、前記リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、前記サスペンション装置を制御することによって擬似的に発生させる。
(もっと読む)
駐車支援装置
【課題】駐車目標位置に車両を導入する際に障害物等を避けた切り返しが可能となる駐車支援装置を構成する。
【解決手段】停車位置から駐車目標エリアGに車両30を直接的に誘導する直接誘導制御を行えない場合に切り返し誘導制御を設定する。切り返し誘導制御では、停車位置から駐車目標エリアGの近傍まで補助誘導経路K1に沿って車両30を誘導する。次に、人為操舵による前進を許し、この前進時に駐車目標エリアGに直接的な誘導が可能である場合には報知を行い、この報知で停車した後には、最終誘導経路K3に沿って車両30を誘導する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】より運転者の意図に整合する運転操作支援を行うこと。
【解決手段】本発明に係る自動車では、制御仮値設定手段が、自車両のリスクが縮小する方向に車両制御手段における車両制御の仮値を設定し、仮値に基づいて車両制御手段が実行した車両制御に対する運転者の応答操作を応答検出手段が検出する。制御本値設定手段は、応答検出手段によって検出された運転者の応答操作に基づいて、車両制御の本値を設定する。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】駐車目標位置の近傍に存在する障害物の位置を確実に計測できるようにして、自動操舵制御により自車を駐車目標位置へと誘導する際の信頼性を向上させる。
【解決手段】駐車支援コントローラ10が、自車の駐車目標位置の設定時までの間に得られる情報に基づいて、駐車目標位置よりも自車進行方向の前方側に存在する障害物の位置を超音波ソナー2a,2bで計測するための予備経路を駐車目標位置の設定時に算出する。そして、駐車目標位置を設定した直後に自車の自動操舵制御を開始して、自車が予備経路に沿って障害物の近傍を通過するように、自車の操舵を制御する。
(もっと読む)
駐車支援装置及び駐車支援方法
【課題】車両の駐車目標位置までの移動時間の短縮を図りながら、移動の際の軌跡ずれを生じさせずに車両を駐車目標位置へと誘導できるようにする。
【解決手段】自車の操舵及び駆動・制動を自動制御して自車を誘導軌跡に沿って駐車目標位置へと移動させる際に、駐車支援コントローラ1が、自車の舵角速度に応じて制御車速(上限速度)を可変制御し、誘導軌跡上で舵角速度が大きくなる位置では制御車速が低く、逆に舵角速度が小さくなる位置では制御車速を高くなるように、誘導経路上の各位置における舵角速度に応じて制御車速を設定する。
(もっと読む)
駐車支援装置
【課題】駐車目標位置を確認した後に特別な操作を必要とすることなく、円滑に自動操舵制御を開始することが可能な駐車支援装置を提供する。
【解決手段】駐車目標位置を設定する駐車目標位置設定部2と、駐車目標位置への誘導経路を演算する誘導経路演算部3と、誘導経路が成立した際に自動操舵が可能になったことをドライバーに報知する報知情報を出力する報知情報出力部4と、舵取り装置をドライバーが保持していない非保持状態であるか否かを判定する非保持状態判定部5と、誘導経路が成立し、且つ非保持状態である場合に、舵取り装置を制御して駐車目標位置へ自動操舵により車両を誘導する誘導部6が誘導可能な誘導可能状態であると判定して、誘導部6に誘導を開始させる誘導開始判定部7とを備える。
(もっと読む)
車両用走行制御装置および車両用走行制御装置の制御方法
【課題】目標経路と自車両の位置との定常偏差を低減しつつ、操舵系に大きな制御力が発生して運転者に違和感を与えることを抑制可能とすること。
【解決手段】入力を積算しその積算結果に比例して操舵系への出力を設定する積分動作を行う制御系29によって、操舵系を制御するようにした。そして、目標経路と自車両の位置との偏差ΔYの絶対値|ΔY|が第1設定値未満である場合には、制御系29の積分動作において前記入力に代えて前記入力より小さい値を積算させるようにした。
(もっと読む)
挙動制御装置
【課題】車両が旋回走行するとき、車両の挙動に運転者が違和感を持つことを回避できる、挙動制御装置を提供する。
【解決手段】車両が旋回走行する際の目標横加速度を求め、目標横加速度に基づいて目標ヨーレートを求め、車両が旋回走行する際の実ヨーレートを目標ヨーレートに近づけるように車両の挙動を制御する、挙動制御装置において、車両が旋回走行する際の半径に基づいて、将来の横加速度を推定する第1推定手段(ステップS)と、車両における現在の横加速度に基づいて、将来の横加速度を推定する第2推定手段(ステップS2)、と、車両における現在のステアリングホイールの操舵角に基づいて、将来の横加速度を推定する第3推定手段(ステップS3)と、第1推定手段(ステップS1)または第2推定手段(ステップS2)または第3推定手段(ステップS3)により推定された横加速度のうち、最小値を目標横加速度として選択する選択手段(ステップS7)とを備えている。
(もっと読む)
運転操作支援装置、自動車及び運転操作支援方法
【課題】運転者が車線変更を行う際の運転操作支援をより適切に行うこと。
【解決手段】操舵入力を行う操舵入力手段と、操舵入力手段における操舵反力を付与する操舵反力付与手段と、自車両の進路となる道路に関する情報を取得する道路情報取得手段と、自車両の走行状況に関する情報を取得する走行状況取得手段と、道路情報取得手段が取得した情報と、走行状況取得手段が取得した情報とに基づいて、分岐予定である分岐点と自車両との位置関係を検出する走行位置検出手段と、走行位置検出手段が検出した分岐点の位置と、走行状況取得手段が取得した自車両の走行状況に関する情報とに基づいて、分岐点の位置に対する自車両の走行経路の状況に応じた操舵反力付与手段に関する制御量を算出する制御量算出手段と、制御量算出手段によって算出した制御量で、操舵反力付与手段を駆動する駆動手段とを有する自動車とした。
(もっと読む)
操舵制御装置
【課題】 電力消費量を低減した操舵制御装置を提供する。
【解決手段】 ハウジングに設けられ、作動液供給機器から供給される作動液によってコントロールバルブを制御するバルブ制御機構と、バルブ制御機構と作動液供給機器とを連通する連通路と、連通路上に設けられ、車両の走行状態または運転者の運転状態に基づき、連通路の連通と遮断を切換え制御するとともに、通電状態において連通路を遮断状態とし、非通電状態において連通状態とするソレノイドバルブとを有することとした。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】回避制御に対し運転者が感じる違和感を低減する。
【解決手段】車両制御コントローラ14が、回避経路の設定可能範囲の大きさに基づいて、回避制御に対する運転者の車両操作の寄与度を決定し、操舵角プロフィールと寄与度に応じてブレーキアクチュエータ12と操舵アクチュエータ13を制御することにより、回避経路に沿って車両1が走行し、且つ、運転者の車両操作が寄与度に応じた抑制度合いになるように操舵角,アクセル開度,及び制動液圧を制御する。これにより、回避経路の範囲の大きさ及び回避制御に対する運転者の回避操作の影響を考慮して回避制御が実行されるので、回避制御に対し運転者が感じる違和感を低減することができる。
(もっと読む)
車両走行支援装置及び車両走行支援方法
【課題】 必要に応じて予測した制御指令値を用いることにより高い精度で車両の運転操作を支援することができる車両走行支援装置等を提供する。
【解決手段】 第1制御指令値演算部22が所定の制御周期で第1制御指令値を演算し、将来状態予測部24が第1時刻における自車両運動状態及び障害物状態に基づいて第1時刻から所定時間後の第2時刻における自車両運動状態及び障害物状態を予測して、第2制御指令値演算部25が予測された第2時刻における自車両運動状態及び障害物状態に基づいて、第2時刻以降の第2制御指令値を演算する。予測適切度評価部23は、予測された自車両運動状態及び障害物状態と実際の自車両運動状態及び障害物状態とを比較して予測適切度を判定し、制御指令値出力処理部26は、予測適切度に基づいて第2時刻以降の実際の制御指令値として第1又は第2制御指令値を出力する。
(もっと読む)
運転支援装置
【課題】運転者の覚醒度、及び、自車両の周辺環境に応じて、体感警報を発生させることで注意喚起を行なうことが可能な運転支援装置を提供することを目的とする。
【解決手段】自車両周辺の他車両の情報である周辺車両情報を検出すると共に、自車両の運転者の覚醒度を検出し、これらの周辺車両情報及び覚醒度に基づいて、自車両のリスクレベルを設定する。さらに、運転者が触覚を用いて認識することができる刺激を付与することで、体感警報を発生させる体感警報発生手段35,41,47を備える構成とする。これにより、設定されたリスクレベルに応じて体感警報を発生させることができ、覚醒度、及び、自車両の周辺環境に応じて、注意喚起を実行することができる。
(もっと読む)
41 - 60 / 219
[ Back to top ]