
Fターム[3D232DA77]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 障害物 (662) | 他車 (219)
Fターム[3D232DA77]に分類される特許
61 - 80 / 219
車両制御装置及び車両制御方法
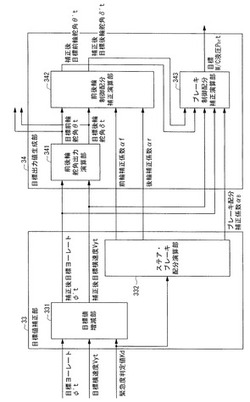
【課題】運転者に違和感を与えることなく車両の安定性を確保することができる車両制御装置及び車両制御方法を提供する。
【解決手段】目標ヨーレートφ´tと目標横速度Vytとに基づいて算出される目標前輪舵角θt及び目標後輪舵角δtに基づいて、前輪操舵アクチュエータ7及び後輪操舵アクチュエータ8を駆動制御して前輪操舵機構12及び後輪操舵機構15を駆動する。また、運転者による緊急操舵を検出したとき、その緊急度(緊急度判定値Kd)が高いほど各輪に付与する制動力を大きく設定する。これにより、緊急操舵時の車両の応答性を確保しつつ安定性を向上することができる。
(もっと読む)
プレビュー情報に基づいて運転支援の態様を変更する車輌

【課題】車輌運転支援装置に内在する作動遅れに相当する車輌走行距離以上に車輌より前方の位置にある走行経路の状況を事前に知ることにより、車輌がその位置に至ったときその走行経路状況により適した運転性能を有するように車輌運転支援の態様を先行制御する。
【解決手段】走行経路に沿って走行中の車輌の現在位置より走行経路に沿った前方の位置にある走行経路状況が第一と第二の状況の間に異なることに対応させて車輌の運転支援制御の態様を第一と第二の異なる態様の間で変更する。
(もっと読む)
操舵支援装置
【課題】 運転者の意図に応じた補助操舵トルクを付与することにより、運転者に与える違和感を軽減しながらハンドル操舵に適応した操舵支援制御が行うことができる操舵支援装置を提供する。
【解決手段】 逸脱防止支援ECU10は、操舵トルクが操舵トルクしきい値を超え、制御トルクが制御トルクしきい値を超えた時間が成立判定時間しきい値を超えたときに、干渉判定を成立させて、目標制御トルクを小さくする。ここで、車両の前方に他車両が走行し、他車両と白線との距離が所定値以下であり、かつ車両の他車両に対する到達時間が所定値以下の場合に操舵トルクしきい値、制御トルクしきい値、および成立判定時間しきい値を小さくする。
(もっと読む)
経路推定装置及び運転支援装置
【課題】ドライバに煩わしさを感じさせることなく車両が安全に走行できるように運転支援を行う。
【解決手段】運転支援装置は、車両の現在位置を検出する自車測位装置13と、車両の挙動を検出する自車挙動計測装置11と、現在位置j、時間k、予測位置i、挙動bをそれぞれ離散化した場合の各々の組み合わせについて、車両が現在位置jで挙動bの状態である場合に時間k経過後に予測位置iにいる確率pを示した確率データを記憶する記録媒体21と、検出された現在位置において車両が検出された挙動である場合に、記録媒体21に記憶された確率データに基づいて、検出された現在位置から所定時間までに確率pが所定の閾値以上となる予測位置を車両経路として推定する自車経路推定装置41と、推定された車両経路を車両が走行すると障害発生の可能性がある場合に、警報を発生することで運転支援を行う支援インタフェース装置50と、を備えている。
(もっと読む)
車群走行システム及び車群走行装置
【課題】車群走行において先行車両が受ける空気流を利用することができる車群走行システム及び車群走行装置を提供する。
【解決手段】先行車両である自動車10aの下面には、合計6枚の導風板20a〜20fが自動車10aの下面から路面に対して垂直に突出するようにして備えられている。先行車両である自動車10aの導風板20a〜20fが、自動車10aの走行時に自動車10aが受ける空気流を整流し、空気流を自動車10aの後続車両である自動車10bが有するエアインテーク30に導くため、自動車10bはエアインテーク30から自動車10aからの空気流を効率良く受けることができる。
(もっと読む)
操舵支援装置
【課題】隣接車両の回避時におけるドライバの操舵操作との干渉を軽減した操舵支援装置を提供する。
【解決手段】走行車線内の目標走行位置Xcを自車両OVが走行するよう操舵機構10へ操舵力τを付与する操舵支援装置を、自車両前方の環境を認識して走行車線を設定する車線設定手段110と、走行車線からの自車両の逸脱傾向を判定する逸脱判定手段140と、逸脱傾向が判定されたときに操舵機構に逸脱回避方向への操舵力を付与する操舵制御手段150と、環境認識手段を用いて自車両の前方で自車両の走行車線と隣接して走行する隣接車両NVを検出する隣接車両検出手段160と、隣接車両の自車両に対する接近度を算出する接近度算出手段170とを備え、操舵制御手段は、逸脱判定手段が隣接車両の走行車線と反対側への逸脱傾向を判定したときに、接近度の増加に応じて逸脱回避方向への操舵力を低減する構成とする。
(もっと読む)
車線逸脱抑制装置
【課題】一方側の区画線しか検出できない場合に適切な他方側の区画線を推定できる車線逸脱抑制装置を提供することを課題とする。
【解決手段】一対の区画線からなる車線から車両が逸脱するのを抑制する車線逸脱抑制装置1であって、車両前方の区画線を検出する区画線検出手段10と、車両のドライバの覚醒度を検出する覚醒度検出手段13と、区画線検出手段10で一対の区画線のうちの一方側の区画線だけを検出している場合、覚醒度検出手段13で検出したドライバの覚醒度に基づいて他方側の区画線に対応する仮想線を推定する仮想線推定手段31とを備えることを特徴とする。
(もっと読む)
車両の運転支援装置
【課題】交差点においてもリスクを適切に設定して最小リスク計算を円滑に行うことができ回避ルートの設定及び障害物との衝突判定を連続して自然に且つ精度良く実行する。
【解決手段】制御ユニット5は、自車両1の周辺に存在する白線、ガードレール、側壁、及び、立体物のそれぞれを対象として、自車両が各時間毎の旋回制御量で移動したときの各ルート毎のリスク関数を設定し、各ルート毎のリスク関数から最終的な回避ルートを選択し、最終的な回避ルートに基づいて操舵制御、及び、ブレーキ制御を実行させる。この際、交差点に対してリスク関数を設定する際には、交差点上に自車両1の右左折に対応したリスク関数を設定して補間する。
(もっと読む)
車両制御装置
【課題】
従来技術によれば、自車左に障害物がある場合、当該障害物を回避するよう制御閾値が設定され、自車は当該制御閾値を超えると逸脱量に従って制御閾値を超えない位置まで戻るよう制御されるが、自車右にリスクを持った対向車が接近している場合でも、対向車の方へ自車を制御するため、運転者にとって恐怖感や違和感を与える、という課題がある。
【解決手段】
車両制御装置は、自車の左に存在する第1の危険度、及び、自車の右に存在する第2の危険度を算出する算出部と、第1の危険度に基づいて第1の制御閾値を自車の左に設定し、第2の危険度に基づいて第2の制御閾値を自車の右に設定する設定部と、第1及び第2の危険度に基づいて、第1又は第2の制御閾値のうち、少なくとも何れか一方を変更する変更部を備える。
(もっと読む)
車両走行支援装置
【課題】走行中の障害物を回避する際に、十分な安全性を確保すると共に、適切な走行支援を行うことができる車両走行支援装置を提供する。
【解決手段】物体領域設定部17が、障害物検出部12及び二輪車判定部13により障害物として二輪車が検出された場合に、障害物の高さに基づいて物体領域Aを設定する。障害物が二輪車の場合は、転倒することによって必要とされる物体領域Aが増大する可能性があるが、障害物の高さに基づいて物体領域Aを設定することによって、転倒の可能性も考慮して安全性を確保することができる。また、障害物の高さに基づいて、転倒の可能性も考慮した必要最低限度の物体領域Aを設定することができるため、必要以上に広い物体領域Aを確保することを防止することができる。
(もっと読む)
車両用走行支援装置および車両用走行支援方法
【課題】障害物回避制御を行う場合に、運転者の違和感を抑制すること。
【解決手段】回避経路情報演算手段が、自車両が障害物と車幅方向で重なり始めるときに、自車両のヨーレートが障害物から自車両が遠ざかる向きとなるように回避経路の情報を算出する。車両挙動制御手段が、算出した回避経路の情報に基づき、当該回避経路に沿って自車両が走行するように自車両の挙動を制御する。このため、自車両が障害物と車幅方向で重なり始めたときに、自車両を障害物から遠ざかる向きに回頭させることができる。そして、自車両が障害物に近づく方向に向かうような感覚を運転者に与えることを防止できる。この結果、障害物回避制御を行う場合に、運転者の違和感を抑制できる。
(もっと読む)
車線逸脱防止装置及びその方法
【課題】自車両側方の障害物の存在に、車線逸脱防止制御の作動を合致させる。
【解決手段】車線逸脱防止装置は、障害物を検出するレーダ装置14L,14Rが走行車線に対して逸脱傾向が発生している方向で自車両の側方に位置する障害物を検出した場合(ステップS24)、切増し操作量判定用しきい値δovr_endを大きくすることで、運転者の操舵操作に対する車線逸脱防止制御の作動の抑制をしない方向に補正をする(ステップS25)。
(もっと読む)
走行制御装置、及び走行制御方法
【課題】自車両の車線変更などの横移動を抑制するタイミングを最適化する。
【解決手段】自車両の側方に存在する側方物体を検出し(ステップS3)、走行車線に対して自車両が車頭時間Tt後に到達する後刻横位置Xfを推定し、側方物体を検出している状態で、後刻横位置Xfが所定横位置XLに達したときに、側方物体の側への自車両の車線変更を抑制するものであって、自車両が側方物体の側に横移動するときの走行車線に対する横速度Vxを検出し(ステップS6)、この横速度Vxが速いほど、後刻横位置Xfが所定横位置XLに達しやすくなるように、後刻横位置Xfを補正する。すなわち、横速度Vxが速いほど、1よりも大きい値になる補正ゲインαを算出し(ステップS7)、推定した後刻横位置Xfに補正ゲインαを乗じることで、この後刻横位置Xfを補正する(ステップS11)。
(もっと読む)
車両用操舵装置及び車両用操舵方法
【課題】周囲のリスクに対応した操舵反力を運転者が理解し易い車両用操舵装置を提供する。
【解決手段】運転者が受けるステアリングホイールからの操舵反力と車両操作機器の動作状態に基づいて車両操作機器に作用する運転者の操作力以外の外乱を補償しつつ、自車両周囲のリスク度合い及び操舵角に応じた操舵反力を操舵伝達系に付加する。
(もっと読む)
駐車支援装置および駐車支援方法
【課題】切り返しを含む一連の駐車経路を算出して駐車支援を行うことにより、車両運転者の負担をより一層低減できるようにした駐車支援装置および駐車支援方法を提供する。
【解決手段】駐車の初期位置および初期姿勢と、駐車の目標位置および駐車姿勢とを検知し、初期姿勢に応じて初期位置からの車両の経路として設定可能な経路を第1移動経路、駐車姿勢に応じて目標位置に到達する車両の経路として設定可能な経路を第2移動経路としたときに、第1移動経路と第2移動経路との接点となる位置が存在し得る候補領域を算出する。そして、当該候補領域内で車両乗員により選択された位置、あるいは当該候補領域内で任意に自動選択した位置を切り返し位置として決定し、初期位置から切り返し位置を経由して目標位置に到達する一連の経路を駐車経路として算出する。
(もっと読む)
運転支援装置
【課題】車線変更確率の精度向上が図られ、車線変更確率に応じて運転支援を実行することが可能な運転支援装置を提供すること。
【解決手段】運転者の加減速操作に関する運転特徴を示す第1の学習値に基づいて車線変更確率を算出する。運転者の操舵操作に関する運転特徴を示す第2の学習値と、自車両周辺環境および/または運転者情報とに基づいて車線変更確率を補正する。これらにより、精度良く車線変更確率を求めることができ、運転者の意思による車線変更と、運転者の意思によらない車線逸脱との判別の精度向上を図ることが可能となる。また、車線変更確率に応じて運転支援を制御する運転支援手段を備える構成とし、補正されて精度が向上された車線変更確率に応じて、好適に運転支援を実行する。
(もっと読む)
車両の運転支援装置
【課題】実際の回避走行に沿った目標自車進路を設定して自然な運転支援を行う。
【解決手段】制御ユニット5は、対象物と自車両1との相対速度Vfと対象物の種類に応じて対象物からの横移動量Wを設定し、対象物からの横移動量Wと距離dとに基づいて目標自車進路を推定し、最大横加速度(d2y/dt2)maxを推定する。そして、最大横加速度(d2y/dt2)maxが、警報制御閾値Ca以上の場合は警報制御を行ない、ブレーキ制御閾値Cb以上の場合は警報制御を行うと共にブレーキ制御を行う。また、許容最大横加速度(d2y/dt2)max_cを設定し、許容最大横加速度(d2y/dt2)max_cと対象物からの横移動量Wと自車速Vとに基づいて限界自車進路を推定して必要横加速度(d2y/dt2)cを演算し、実横加速度(d2y/dt2)rと必要横加速度(d2y/dt2)cとに基づいて操舵制御を行う。
(もっと読む)
車両の運動制御装置、及び車両の運動制御方法
【課題】車両の進行方向に複数の障害物が存在する場合において、車両が各障害物のうち少なくとも1つの障害物と接触し得る緊急状態であるときには、該障害物との接触によって車両が被る損傷を小さくできる車両の運動制御装置、及び車両の運動制御方法を提供する。
【解決手段】各ECUは、車両の進行方向に存在する各障害物のうち少なくとも1つの障害物に車両が接触する可能性がある場合(ステップS12が肯定判定)において、回避制御によって車両と各障害物との接触を回避可能であるとき(ステップS15が肯定判定)には、回避制御を実行する。一方、各ECUは、回避制御を実行しても車両が少なくとも1つの障害物に接触する可能性があるとき(ステップS15が否定判定)には、損傷低減走行軌跡55を設定し(ステップS19)、該損傷低減走行軌跡55に車両の実際の走行軌跡が接近するように損傷低減姿勢制御を実行する(ステップS20,S21)。
(もっと読む)
運転支援装置、運転支援方法
【課題】意識低下状態から覚醒状態に復帰した場合でも、車両挙動を安定化させることができる運転支援装置及び運転支援方法を提供すること。
【解決手段】運転者の覚醒度に応じて運転者を支援する運転支援装置100において、運転者が意識低下状態から覚醒した直後か否かに応じて、運転者を支援する車両制御の態様を可変にする、ことを特徴とする。
(もっと読む)
車線変更支援装置
【課題】
従来の車線変更支援装置では、白線情報を自車と周囲車両の相対情報を算出するために用いているのみであり、道路情報から自車の車線変更支援をして良い場所か否かを判断していない。そのため、車線変更が法律で禁止されている隣車線への車線変更を支援したり、これ以上速度を出すと危険なカーブ曲率の大きい道路で加速制御をしてしまう、いう課題があった。
【解決手段】
車線変更支援装置は、車線変更を支援する機能を許可する第1の制御モードと、車線変更を支援する機能を禁止する第2の制御モードと、自車が走行する道路情報を取得する道路情報取得部と、自車と周囲車両との相対情報を取得する相対情報取得部と、前記道路取得部が取得した道路情報に基づいて制御モードを選択する選択部と、前記相対情報取得部が取得した相対情報及び前記選択部が選択した制御モードに基づいて自車を制御する制御部と、を備える。
(もっと読む)
61 - 80 / 219
[ Back to top ]