
Fターム[3D232DA77]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 障害物 (662) | 他車 (219)
Fターム[3D232DA77]に分類される特許
21 - 40 / 219
操舵支援装置
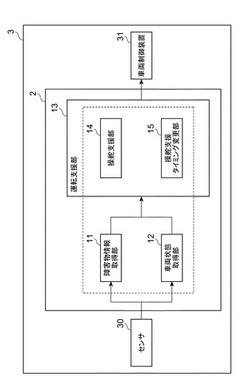
【課題】障害物が移動する場合であっても適切な操舵支援を行うことができる操舵支援装置を提供する。
【解決手段】障害物の位置情報に基づいて障害物を回避するための操舵支援を行う操舵支援装置1であって、障害物が移動物体であるか否かを判定する障害物情報取得部11と、障害物情報取得部11により障害物が移動物体であると判定された場合には、障害物が静止物体である場合に比べて操舵支援の開始タイミングを遅らせる操舵支援タイミング変更部15と、を備えて構成する。
(もっと読む)
移動体走行経路生成装置

【課題】求めた障害物回避経路の障害物に対する回避方向が、運転操作に基づき設定された障害物回避方向に一致するようにして、運転者に違和感を与えないようにした移動体走行経路生成装置を提供する。
【解決手段】(a)では、運転操作に基づく障害物回避方向X1、および初期目標回避経路候補X2を設定する。(b)では、第2リスクポテンシャルを生成するための仮想障害物32aを、目標回避経路候補X2を挟んで検出障害物32と反対側の位置に設定する。(c)では、仮想障害物32aに基づき生成した第2リスクポテンシャルを基に目標回避経路候補X2を目標回避経路候補X3に補正する。(d)では、新たな仮想障害物32bを設定し、これに基づき第2リスクポテンシャルを生成し直し、この第2リスクポテンシャルを基に目標回避経路候補X3を最終的な目標走行経路X4へと補正する。
(もっと読む)
駐車支援システム
【課題】日常的に使用する駐車場について、駐車枠の設定の手間を軽減することが可能な駐車支援システムを提供すること。
【解決手段】目標とする駐車領域のコーナー部に駐車支援シート40を配置する。この駐車支援シート40には、駐車領域のコーナー点及びそのコーナーから延びる2本の直交する駐車枠線の位置を定めるための模様が描かれている。CCDカメラ10によって撮影したカメラ画像を、画像処理ECU20において画像処理することにより、カメラ画像内で駐車支援シート40が検出できたとき、コーナー位置を示す仮想コーナーポール、仮想駐車枠線、及び仮想駐車枠線と自車両との最短距離などを重畳表示した車両周辺画像を表示する。
(もっと読む)
自動運転装置
【課題】 自車両の自動運転を行うにあたり、自車両の周囲における交通環境に応じた走行制御を行うことにより、自車両の周囲における交通環境の妨げを防止することができる自動運転装置を提供する。
【解決手段】 自動運転装置における自動制御ECU1は、走行中の道路に対して道なりに走行させる自動運転制御を行うにあたり、自車両が走行する車線の状態を検出し、検出した車線の状態に基づいて、自動運転制御を行う。たとえば、自車両が走行する道路に自車走行車線が道なり走行可能である道なり車線があるにも係わらず、自車両が道なり車線でない車線を走行している場合には、自車両を道なり車線に移動させる進路を生成する。また、自車両が走行する道路に道なり車線が複数ある場合には、道なり走行に好適となる道なり車線に自車両を移動させる進路を生成する。
(もっと読む)
運転者支援システムのための実世界の交通場面からの視覚特性の行動ベース学習
【課題】運転者支援システムをセットアップおよび運用するための、コンピュータに実装される方法を提供する。
【解決手段】車両の環境を視覚感知するステップと、車両のマン・マシン・インタフェースを操作している運転者の影響を受ける可能性がある、車両の状態を表すパラメータの少なくとも1つの変化率を感知するステップと、感知された変化率の特定のカテゴリに関連付けられ、したがって、運転者の特定行動に関連付けられた視覚的特徴を見つけるために、視覚感知によって収集された情報を、少なくとも1つの感知された変化率をその様々なカテゴリに分類することによって構造化するステップと、を含む。
(もっと読む)
走行路逸脱防止装置及びそれを備えた車両
【課題】走行路逸脱防止制御において、運転者の操作意図がない状態で車両の走行路逸脱を防止するためアクチュエータが作動した場合に、運転者の操作意図があると誤判断して逸脱防止制御が中断することを防止すること。
【解決手段】各センサやカメラ等の検出手段の結果に基づいて走行路外への逸脱防止制御を行う逸脱防止制御手段と、運転者の操舵意図を判定する運転意思判定手段と、運転意思判定手段からの運転者の操舵意図に基づいてアクチュエータの作動を規制するアクチュエータ作動規制手段とを有し、運転意思判定手段は、検知した操舵トルクの変化量ΔTh及び操舵アクチュエータへの制御指令値の変化量ΔTsとを算出し|ΔTh|−|ΔTs|が閾値以上の場合に運転者の操作意図があると判断して逸脱防止制御の作動を制限する。
(もっと読む)
車両の軌道の決定方法
【課題】ブレーキ過程において制動距離を短縮するための方法および装置、または加速過程においてトラクションを改善するための方法および装置を提供する。
【解決手段】車両(1)の軌道(5、6、7)の決定方法において、操縦の際に、種々の走行路領域の摩擦係数情報が決定され、障害物に関して周辺検出が実行され、摩擦係数情報に基づき且つ周辺検出の結果を考慮して、少なくとも1つの軌道(5、6、7)が決定される。これにより、制動距離の短縮または改善されたトラクション(牽引)が達成可能である。
(もっと読む)
車両用運転支援装置
【課題】車両の前進時に、内輪差による捲き込みを回避するように運転者を十分に支援すること。
【解決手段】車両前方を撮像する撮像手段と、前記撮像手段によって撮像された画像を表示し、該表示された画像上でユーザーが車両前方の回避ポイントを設定可能な画像表示・回避ポイント設定手段と、運転者に情報提供可能な情報提供手段と、前記運転者が前記回避ポイント側に規定量のステアリング操作を行なっても前記回避ポイントを回避して走行可能なステアリング操作許容ポイントを算出し、車両が該算出したステアリング操作開始許容ポイントに至ると所定の情報提供を行なうように前記情報提供手段を制御する制御手段と、を備える車両用運転支援装置。
(もっと読む)
群走行制御装置及び群走行制御方法
【課題】処理負荷を抑えつつ群の挙動を乱さないような干渉回避行動を行う。
【解決手段】自車両M0を囲うように設定されて他車両との干渉を少なくとも規定の進行方向変更からなる回避行動で回避可能な干渉回避エリアAR−1を有すると共に、自車両M0の周囲に位置する他車両と車車間通信をしながら群走行を行う群走行制御装置である。上記進行方向変更による回避量は、上記干渉回避エリアAR−1において、自車両M0の側方位置に比較して、自車両M0の前方位置が大きく設定する。自車両M0に対する相対距離が小さな他車両を干渉回避対象として選択する。干渉回避対象が自車両M0の干渉回避エリアAR−1のどの位置に侵入したかを検出する。検出された干渉回避対象の位置、及びその干渉回避対象が位置する干渉回避エリアAR−1内の位置に応じた進行方向変更の回避量に基づき、上記干渉回避対象に対し、自車両M0の回避動作を行わせる。
(もっと読む)
ドライバーアシスト方法
【課題】従来技術によるドライバーアシスト方法および装置の欠点を改善すること。
【解決手段】センサを用いて車両周辺が検出され、検出された車両周辺が少なくとも部分的に指示部に表示され、車両を移動させるドライブアシストが現在のポジションから出発して車両の目標ポジションに達するように行われる、車両に対するドライブアシスト方法において、
目標ポジションが指示部に表示されかつ目標ポジションは入力ユニットを用いて指示部における車両周辺の表示においてシフトされるおよび/または回転され、
カメラユニットによって実際の周辺表示が作成され、実際の周辺表示に前記目標ポジションがフェードインされる
ことを特徴とする方法。
(もっと読む)
車両制御装置
【課題】接触回避支援制御機能と、車両姿勢安定化制御機能との的確な協調制御を行う。
【解決手段】接触回避支援制御部は、VSA制御部によるVSA制御がオフ状態になっている場合は、オン状態になっている場合のタイミングよりも早いタイミングで接触回避支援、例えば、警報を発生し、該警報により操向ハンドルの操作を促すことで、確実に接触回避支援を行うことができ、結果として、接触回避支援制御機能と、車両姿勢安定化制御機能との的確な協調制御を行うことができる。
(もっと読む)
車両用接触回避支援装置
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
走行支援装置および走行支援方法
【課題】検出対象を回避する必要があるかを適切に判断可能な走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段20a,20bと、撮像手段20a,20bにより撮像された画像の情報に基づいて、画像内に存在する特徴点を抽出する特徴点抽出手段と、特徴点の移動方向および移動速度を含む移動情報を算出する移動情報算出手段と、移動情報に基づいて、検出対象を含む対象領域を抽出する対象領域抽出手段と、撮像手段20a,20bから見た検出対象の移動速度を、相対角速度として算出する相対角速度算出手段と、相対角速度に基づいて、検出対象を回避する必要があるかを判断する判断手段と、を有することを特徴とする走行支援装置。
(もっと読む)
車両用接触回避支援装置
【課題】自車と自車前方の障害物との位置関係に基づく接触余裕値を得、前記接触余裕値が閾値より小さく、かつ操向ハンドルの操作が検出されなかったとき、前記障害物に対する自車の接触回避支援を行う車両用接触回避支援装置において、バンク路の走行中に、接触回避支援処理が過剰に作動することを防止する。
【解決手段】自車10がバンクを有するカーブ路300を走行していると判断した場合には、接触回避ECUが、前方の障害物であるガードレール5との接触の可能性があると判断する接触余裕値の閾値を、より小さい値に設定するか、接触回避支援行わないようにする。
(もっと読む)
車両用接触回避支援装置
【課題】レーンキープアシスト手段によって車両が操舵制御されているときには、接触回避支援処理が過剰に作動しないようにする。
【解決手段】接触回避ECU20は、レーンキープアシスト部96によって車両10が操舵制御されているときは、車両10が自車線302を逸脱する可能性がきわめて低いことを考慮し、レーダ80によって検出された車両前方の対向車11との相対位置に基づき得られる接触余裕値Laの閾値Laを、レーンキープアシスト部96によって車両10が制御されていないときの第1閾値Lth1より小さい第2閾値Lth2に置き換えて、対向車11に対する当該車両10の接触回避支援を行うようにしたので、接触回避支援処理が過剰に作動する状況を防止できる。
(もっと読む)
車両用接触回避支援装置及び車両用操舵アシスト装置
【課題】障害物との接触回避をより好適に支援することが可能な車両用接触回避支援装置を提供する。
【解決手段】車両用接触回避支援装置14は、車両10と車両10前方の障害物12との相対位置を検出する相対位置検出手段80と、前記相対位置に基づいて接触回避の支援の要否を判定し、接触回避の支援が必要であると判定したとき、回避方向への操舵アシストを制御する操舵アシスト制御手段20と、車両10にかかるヨーモーメントMyに影響を及ぼし且つ当該影響が操舵方向により異なる走行環境を検出する走行環境検出手段20、83とを備え、前記操舵アシスト制御手段20は、前記走行環境に基づいて前記回避方向への操舵のアシスト力Fasiを補正する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の補助を行うこと。
【解決手段】車輪と車体との間に介在された能動型のサスペンション装置と、車両周囲の障害物を検出する障害物検出手段と、障害物検出手段によって検出した障害物の種類を判別する障害物判別手段と、障害物判別手段の判別結果に基づいて、傾斜角を有する仮想路面を設定する仮想路面設定手段と、仮想路面設定手段によって設定した仮想路面の傾斜角と対応させて、能動型のサスペンション装置を制御し、車体を傾斜させる車体制御手段と、障害物検出手段によって検出した障害物への接近度合いに応じて、操舵反力を制御する操舵反力制御手段とを備える。
(もっと読む)
車両接触回避支援装置
【課題】障害物との接触回避の支援制御において、路面摩擦係数を好適に推定することが可能な車両接触回避支援装置を提供する。
【解決手段】車両接触回避支援装置14の車両接触回避支援制御手段20は、左右の後輪24L、24R又は左右の前輪22R、22Lに対する制動力に基づく第1路面摩擦係数μ1と、左右の前輪22R、22L及び左右の後輪24L、24Rに対する制動力に基づく第2路面摩擦係数μ2とが異なる場合、第2路面摩擦係数μ2に基づき接触回避の支援制御を行う。
(もっと読む)
走行支援装置及び走行支援方法
【課題】車両を、現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができるようにする。
【解決手段】車両を、基準点から仮想的に移動させ、各経路パターンの先端に設定された仮想移動点に置く仮想移動処理手段と、各仮想移動点を、新たな基準点とする基準点更新処理手段と、車両を仮想移動点まで仮想的に移動させるための仮想移動条件が成立するかどうかを判断する仮想移動条件判断処理手段と、車両を目標位置まで仮想的に移動させるための移動可能条件が成立するかどうかを判断する移動可能条件判断処理手段と、仮想移動条件及び移動可能条件が成立する場合、経路を生成することができると判断する経路生成判断処理手段とを有する。仮想移動条件は、仮想移領域内に障害物が存在する場合に成立せず、障害物が存在しない場合に成立する。
(もっと読む)
走行支援装置及び走行支援方法
【課題】車両を、現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができるようにする。
【解決手段】車両を、基準点から順次複数の所定の経路パターンで仮想的に移動させ、先端に設定された仮想移動点に置く仮想移動処理手段と、各仮想移動点を新たな基準点とする基準点更新処理手段と、車両を仮想移動点まで移動させるための仮想移動条件が成立するかどうかを判断する仮想移動条件判断処理手段と、前記各仮想移動点において、車両を仮想移動点から目標位置まで仮想的に移動させるための移動可能条件が成立するかどうかを判断する移動可能条件判断処理手段と、前記仮想移動条件及び移動可能条件が成立する場合に、経路を生成することができると判断する経路生成判断処理手段とを有する。仮想移動条件及び移動可能条件が成立するまで車両が仮想的に移動させられる。
(もっと読む)
21 - 40 / 219
[ Back to top ]