
Fターム[3D232DA95]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 乗員の操作 (1,442) | トランスミッション(ギア位置を含む) (222)
Fターム[3D232DA95]の下位に属するFターム
ATであるもの (39)
Fターム[3D232DA95]に分類される特許
1 - 20 / 183
操舵機構の制御装置
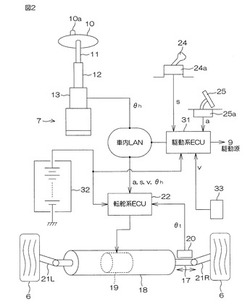
【課題】駆動モータ9の駆動指示量が全開に近い状態のときに、前進・後退を切換えるシフト操作を行うと、車両に慣性力が残っており、駆動輪5を駆動する駆動モータ9に多くの電力を要する。この状態にあるとき転舵モータ19の消費電力が大きいと、駆動輪5の駆動用の電力が不足するおそれがある。
【解決手段】駆動輪5を駆動する駆動モータ9の制御量を指示するアクセルペダル25の開度を検出し、前記アクセル開度が所定値以上であり、かつ、シフトレバー24の操作によって前進・後退切り換え信号の入力がある状態では、前記前進・後退切り換え信号の入力から所定の時間T以内において、前記転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定する。
【効果】シフト操作後の所定時間T以内において、転舵モータ19の駆動電流を、通常の駆動電流に対して減少する側に設定することにより、駆動輪の駆動用の電力の不足を解決する。
(もっと読む)
駐車支援装置

【課題】駐車エリア内にある突出体の存在を考慮して駐車を支援できる。
【解決手段】 車両の駆動を制御する制御手段と、車両周囲の突出体を検出する検出手段と、前記突出体を囲む所定のエリア内に前記車両を誘導するための誘導経路を生成する生成手段と、を有する。前記制御手段は、前記誘導経路に従って前記所定のエリア内に前記車両を誘導する際、前記車両が前記突出体に所定の距離まで近づくと、前記車両の駆動を遅くする。
(もっと読む)
農業用トラクタ
【課題】農業用トラクタにおいて、操舵トルクセンサが故障しても確実に操舵力補助制御を継続できるようにする。
【解決手段】農業用トラクタは、エンジンが搭載され且つ前後四輪にて支持された走行機体と、走行機体に設けられた操縦ハンドルと、電動モータ84を有する電動操舵機構と、操縦ハンドルの操舵トルクを検出する操舵トルクセンサ85とを備える。操舵トルクセンサ85の検出結果に基づき電動モータ84の出力を増減させ、電動操舵機構を介して左右両前車輪を操舵する。走行機体の前後方向の傾斜角を検出するピッチングセンサ104を備える。ピッチングセンサ104の検出結果に基づき電動モータ84の出力を調節可能に構成する。
(もっと読む)
自動操舵制御装置及びプログラム
【課題】補償処理を行うことにより不感帯による影響を軽減することのできる車両用の自動操舵制御装置を提供する。
【解決手段】自動操舵用アクチュエータの制御信号を補償する。スムース幅smwにより変化する補償後電流iと指示電流idの傾き変化を2段階α、βとした。a’とb’点の間に傾きαの線分L1を追加し、補償値の軌跡を、i軸値a'smw'、smw'b'及びa'b'までの長さで決める。不感帯除去の程度は角度αの大きさで決まり、スムース程度は角度βの大きさで決まる。補償性能の劣化しない目標としてスムース幅smwを調整し、その後、設定定数Kによりスムースの程度を調整するので、スムース幅smwを調整しなくでも、スムースの程度を調整できる。スムース幅smwを調整することによる不感帯補償性能の劣化を避け、ふらつきを低減できる。
(もっと読む)
ステアリング制御装置
【課題】車両の発進直後のステアリング操作性を向上させる。
【解決手段】ステアリング制御装置1は、車両2の直進に対応する中立位置を含む範囲で回転操作されるステアリングホイール5に対してトルクを付与するモータ10と、ステアリングホイール5の回転操作に応じて変動する車両2の操舵角を検出する操舵角センサ11と、車両2が発進直後であるか否かを判定する発進判定部22と、車両2が発進直後であると発進判定部22が判定したとき、操舵角センサ11が検出した操舵角に基づいて、中立位置へ向かって作用する中立方向トルクのトルク量を決定し、決定したトルク量の中立方向トルクをモータ10に発生させるトルク制御部22と、を備える。
(もっと読む)
車輪代替部材、操舵反力伝達部材および操舵反力伝達装置
【課題】本発明は、運転の模擬の対象として運転模擬装置に組み込まれる自動車、オートバイ等の実車の操舵系に対するその模擬に応じた操舵反力の伝達に供される車輪代替部材、操舵反力伝達部材および操舵反力伝達装置に関し、模擬の対象となる車両に施されるべき改造の大幅な軽減が図られ、かつ多様な車種に対する柔軟な適応を可能とすることを目的とする。
【解決手段】自動車の車輪に代えて前記自動車に取付可能に構成され、かつ前記自動車に関して模擬された操舵反力を前記車輪の軸に与えることによって構成される。
(もっと読む)
運転支援装置
【課題】自車両を効率的に走行させるような運転支援を実現することができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU7は、自車両周辺の道路状況を認識する道路状況認識部24と、自車両の走行状態を予測する自車状態予測部26と、他車両の走行状態を予測する他車状態予測部27と、他車両に対する自車両のリスクポテンシャルマップを算出するリスクポテンシャルマップ算出部28と、自車両周辺の道路状況と自車両の走行状態と他車両の走行状態とに基づいて自車効率ポテンシャルマップを算出する自車効率ポテンシャルマップ算出部52と、リスクポテンシャルマップと自車効率ポテンシャルマップとに基づいて総合ポテンシャルマップを算出する総合ポテンシャルマップ算出部31と、総合ポテンシャルマップに基づいて操作反力を算出する操作反力算出部32とを有している。
(もっと読む)
ステアバイワイヤシステム
【課題】ステアバイワイヤシステムにおいて、ステアリングホイールの手応え感を最適に調整することにある。
【解決手段】反力発生モータ制御手段24は、異常検出手段24Bを備えるとともに、ステアリングホイール7の操作角を検出する操作角検出手段10,12に連絡し、異常検出手段24Bにより反力発生が停止する異常状態が検出されている時には操作角検出手段10,12により検出されるステアリングホイール操作角に基づいて反力発生モータ13の端子13A,13B間を断続的に短絡させる。
(もっと読む)
車両の統合制御装置
【課題】多機能化するブレーキシステムのそれぞれの機能を適切に調停し、ドライバの信頼性を高め、安全性を向上する。
【解決手段】ブレーキ制御ユニット30は、横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能と車線逸脱減速制御の機能と追従走行制御の機能の5つの機能を有しており、車両のヨーモーメントを制御する横すべり防止制御の機能とコーナリング制動制御の機能と車線逸脱防止ヨーモーメント制御の機能は、横すべり防止制御の機能を最優先で実行し、次に、コーナリング制動制御の機能を優先して実行し、次いで、車線逸脱防止ヨーモーメント制御の機能を実行する。また、車両を減速制御する車線逸脱減速制御の機能と追従走行制御の機能は、減速指示値の大きい方の減速指示値を出力する。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
MDPSの自動フルターン作動制御方法
【課題】Uターンまたはフルターン時に操舵力を最小にすることができ、自動フルターンによってユーザの便宜性を増大することができるMDPSの自動フルターン作動制御方法を提供する。
【解決手段】本発明のMDPSの自動フルターン作動制御方法は、MDPSの自動フルターン作動条件を満たすか否かを判断する段階、MDPSの自動フルターン作動条件を満たす場合、MDPSをフルターンで操向する段階、MDPSの自動フルターン解除条件を満たすか否かを判断する段階、およびMDPSの自動フルターン解除条件を満たす場合、MDPSの自動フルターンを解除する段階を含み、MDPSの自動フルターン作動条件を満たすか否かを判断する段階は、MDPSの作動が正常であるかを判断する段階を含むことを特徴とする。
(もっと読む)
駐車支援システム
【課題】駐車支援システムにおいて、駐車支援の際に、運転者の衣類がステアリングホイールに巻きついたり、ステアリングホイールが運転者の手にぶつかったりする等の予期せぬ事態が発生するおそれをなくすることにある。
【解決手段】ステアリングホイール(7)と操舵輪(15L、15R)とが機械的に切り離され、ステアリングホイール(7)の回転に応じて操舵輪(15L、15R)を操舵する操舵モータ(22、23)を備えたステアバイワイヤシステム(2)であり、自動駐車手段(31)の実行中には、操舵モータ(22、23)により操舵輪(15L、15R)が操舵されてもステアリングホイール(7)は中立位置にある。
(もっと読む)
駐車支援装置
【課題】表示手段において路面の状況を容易に把握しながら車体を目標位置において精度高く停車させ得る駐車支援装置を構成する。
【解決手段】車体を駐車目標エリアFに導入する駐車支援制御を行う際に駐車目標エリアFに最終停車目標位置Pxが設定されると、車体に備えたカメラで進行方向の路面を撮影した撮影画像をモニタ21に表示し、モニタ21に表示された撮影画像には指標Qが表示される。この指標Qは、車体が最終停車目標位置Pxに到達した際に、車体のバンパーの上側の輪郭30Eの形状に合致する形状で、最終停車目標位置Pxに対応する位置に重畳表示される。
(もっと読む)
車線逸脱防止装置
【課題】走行車線から逸脱する傾向にある自車両を走行車線にスムースに復帰させるためのステアリング操作を的確に補助する上で有利なレーン逸脱防止装置を提供する。
【解決手段】車線逸脱判定手段38Aは自車両が走行車線から逸脱する傾向にあるか否かを判定する。修正用走行軌跡算出手段38Cは自車両が走行車線から逸脱する傾向にあると判定された場合に、自車両が走行車線の中心線に戻るために自車両が走行すべき軌跡である修正用走行軌跡を算出する。理想操舵トルク算出手段22Bは、ステアリング1402が前記の修正用走行軌跡に沿って自車両が走行するように操作された場合に操舵機構1406で発生する操舵トルクを理想操舵トルクとして算出する。第2の操舵補助トルク決定手段22Cは、ステアリング1402が操作された場合に操舵機構1406で発生する操舵トルクが理想操舵トルクに合致するように操舵補助トルクを決定する。
(もっと読む)
電気自動車およびプログラム
【課題】様々な路面や走行条件下で安定した走行性を確保することが容易にできる電気自動車およびプログラムを提供する。
【解決手段】前後輪2を差動装置4を介して独立に駆動する2つの電気モータ3を有する電気自動車1において、車体25の少なくとも旋回加速度を検出する加速度センサ25と、各車輪2のスリップ率を演算するスリップ率演算手段と、操舵角を検出する操舵角センサ29と、旋回加速度が操舵角に応じた旋回加速度となるように各車輪のスリップ率が所定の値を超えない範囲で電気モータ3の制駆動力を制御する制駆動力制御手段とを備える。
(もっと読む)
操舵装置及び操舵制御装置
【課題】状態に応じて運転感覚を変えることができる操舵装置及び操舵制御装置を提供することを目的とする。
【解決手段】車両に設けられ回転操作可能である操舵部材2と、操舵部材2の回転方向の振動を調節可能である調節装置6と、車両の運転状態に応じて調節装置6を制御して操舵部材2の回転方向の振動を調節する制御を実行可能である操舵制御装置8と備えることを特徴とするので、状態に応じて運転感覚を変えることができる。調節装置6は、例えば、操舵部材2に伝達される振動の伝達度合いを調節可能であり、操舵制御装置8は、例えば、操舵部材2に伝達される振動の伝達度合いを調節することで操舵部材2の回転方向の振動を調節することができる。
(もっと読む)
駐車支援装置
【課題】運転時においても表示部に表示される予想進路線の意味を運転者に理解させることができる駐車支援装置を提供する。
【解決手段】車両に搭載され、駐車支援画像を表示する表示部Daと、表示部Daに車両の周辺を撮影した画像にステアリングの操作に連動する予想進路線を重畳した駐車支援画像が表示されている際に、駐車支援画像に代えて、車両を示す仮想車両と仮想車両に対する予想進路線である仮想予想進路線とを含む補助映像を表示部Daに表示させる補助映像制御部14を備えた。
(もっと読む)
操舵制御装置
【課題】駐車時における操作性を向上させた操舵制御装置を提供する。
【解決手段】操舵制御装置10のECU40は自車両100の左前輪21〜右後輪24の操舵角を制御する。ECU40は、自車両100が駐車枠Pに平行ではないときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が異なる方向である逆相となるように制御する。逆相とすることにより自車両100の方向を変更しやすくなり、自車両100を駐車枠Pに平行にすることが容易となる。また、ECU40は、自車両100が駐車枠Pに平行であるときは、左前輪21、右前輪22と左後輪23、右後輪24との操舵方向が同じ方向である同相となるように制御する。同相とすることにより自車両100の方向を維持しつつ平行に移動させ、自車両100と駐車枠Pとの左右の間隙を調整することが容易となる。
(もっと読む)
車両の運動制御装置
【課題】制御可能範囲が拡大され、よりアクティブな制御介入が実現できる車両の制御装置を提供することを目的とする。
【解決手段】操作状態量及び運動状態量に対応した車両の規範姿勢状態量を、所定の外力が作用する状態における車両の運動モデルにもとづき演算する規範姿勢状態量演算手段54と、路面摩擦係数推定値を含む前記車両の実姿勢状態量を推定する実姿勢状態推定部52と、実姿勢状態量(慣性力)および前後力に基づき路面摩擦係数相当値を決定する路面摩擦係数相当値決定部200と、実姿勢状態推定部が推定した前記路面摩擦係数推定値と前記路面摩擦係数相当値決定部200が決定した路面摩擦係数相当値に基づき、実路面摩擦係数を推定する実路面摩擦係数推定部400とを備えることを特徴とする車両の運動制御装置
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】車両の運動を示す車両パラメータに基づいて該車両の走行状態を示す指標が求められ、該指標に応じて該車両の走行特性を設定する車両の制御装置において、運転者の意図しない運転操作や走行路面の影響に起因して変動する変動成分を減衰させた前記加速度に基づいて前記指標を求めるノイズ除去装置を設けた車両の制御装置である。
(もっと読む)
1 - 20 / 183
[ Back to top ]