
Fターム[3D232DC02]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 積分処理 (678)
Fターム[3D232DC02]に分類される特許
161 - 180 / 678
電動パワーステアリング装置
【課題】構成簡素且つ信頼性の高い異常判定を行なうことのできる電動パワーステアリング装置を提供すること。
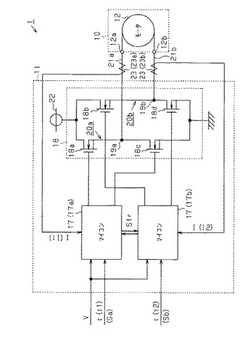
【解決手段】ECU11は、モータ制御信号出力手段として、独立した二つのマイコン17a,17bを備えるとともに、該各マイコン17a,17bは、同一の電流フィードバック演算を実行する。そして、駆動回路18を構成する各スイッチングアーム20a,20bは、その対応するマイコン17a,17bが出力するモータ制御信号に基づいて、それぞれが独立して作動する。また、各マイコン17a,17bは、電流指令値と実電流I(I1、I2)との電流偏差(の絶対値)が所定の閾値を超えるか否かを判定する。そして、その電流偏差が閾値を超える場合には、システムに何らかの異常が発生したものと判定する。
(もっと読む)
電動パワーステアリング装置

【課題】より適切なフィードバックゲインの変更を可能として良好な操舵フィーリングを維持しつつ静粛性の向上を図ることのできる電動パワーステアリング装置を提供すること。
【解決手段】モータ制御信号出力部には、F/Bゲイン演算部52が設けられており、F/B制御部によるフィードバック制御は、同F/Bゲイン演算部52が演算する比例ゲインKp及び積分ゲインKiを用いて行なわれる。そして、F/Bゲイン演算部52は、アシスト勾配α(の絶対値)が所定値α0以下である場合(|α|≦α0)には、そのフィードバックゲインを高く設定し(Kp=P0,Ki=I0)、アシスト勾配αが所定値α0を超える場合(|α|>α0)には、そのフィードバックゲインを低く設定する(Kp=P1,Ki=I1、P1<P0,I1<I0)。
(もっと読む)
電動パワーステアリング装置
【課題】速い操舵での手ごたえや安定感を得られる電動パワーステアリング装置を提供する。
【解決手段】前記ステアリング装置の操作時における操舵角と前記操舵トルクとから得られるヒステリシス曲線が囲む部分の広さを減衰係数A3とし、前記ヒステリシス曲線の対角線を結ぶ線の傾きを動ばね定数A2とし、前記減衰係数A3を前記動ばね定数A2で除算した値を操舵特性に関する評価指標A3/A2としたときの、前記減衰係数A3を、操舵周波数を加味して算出する減衰係数算出部230と、操舵方向が往きであるか戻りであるかを判定する操舵方向判定部235とを備え、前記操舵方向の判定結果が往きであるか戻りであるかによって、前記減衰係数A3による前記ベース信号A1の補正を制御することで、前記操舵周波数にかかわらず前記評価指標が略一定になるようにした。
(もっと読む)
ステアバイワイヤ式ステアリング装置、および該装置を備えた走行車両
【課題】ハンドルの旋回角度と操舵輪の操舵角との間にずれが生じていることを搭乗者にフィードバックすることができる、応答性に優れたステアリング装置および該装置を備えた走行車両を提供する。
【解決手段】本発明に係るステアリング装置は、2軸間トルクTに応じてウォーム4を駆動し、ずれ角度が少なくなる方向にフィードバック軸3を入力軸2に追従して回転させるハンドル負荷制御部20と、入力軸2の回転角度と操舵輪の操舵角度との角度偏差が少なくなるように操舵輪を旋回させる操舵制御部21と、ウォーム4に出力されるトルク指令値の制限値が角度偏差毎に格納された記憶部とを備え、ハンドル負荷制御部20は、記憶部に格納された制限値を超えないように制限されたトルク指令値を出力してウォーム4を駆動する。
(もっと読む)
モータ制御装置および電動パワーステアリング装置
【課題】リニア型のホールセンサを1個のみ備える簡易な構成でロータ角度を一意に検出する。
【解決手段】モータ制御装置のロータ角度位置検出部162は、リニア型のホールセンサ5aから出力されるロータ磁界の大きさに応じたアナログ電圧が最大値または最小値となる時点と、スイッチ型のホールセンサ5bによりロータ7のN極またはS極が検出される時点との先後関係からロータ7の回転方向を判定し、この回転方向とホールセンサ5aから出力されるアナログ電圧とに基づき、得られる2つのロータ角度のうち、正しいロータ角度を選択する。このことにより高価なリニア型のホールセンサを1個のみ備え、かつ安価なスイッチ型のホールセンサを1つ備える簡易な構成でロータ角度を一意に検出することができる。
(もっと読む)
ポンプ装置
【課題】直進走行時におけるポンプのエネルギ損失を抑制し得るポンプ装置を提供する。
【解決手段】電子コントローラ40により、少なくとも車速Vが第1所定車速以上である場合を直進走行状態とみなし、電磁弁16に与える指令電流を操舵角θ、操舵角速度ω及び操舵角加速度ωdの実際の検出値又は算出値に基づいて算出するのではなく、操舵角θ、操舵角速度ω及び操舵角加速度ωdを「0」として必要最小限の目標吐出流量から指令電流を算出して、これによって算出された指令電流をもって電磁弁16を介してカムリングの偏心を抑制するように制御したことにより、直進走行状態において僅かなステアリング操作やキックバック等の外乱によるステアリング動作等が発生した場合でも、ポンプの固有吐出量(吐出流量)が過敏に増加してしまうおそれがなく、当該ポンプのエネルギ損失の低減化に供される。
(もっと読む)
運転中の車両のドライバーを補助するための方法及びシステム
本発明は、現在の運転シナリオに基づいて望ましくない状況を回避するために、運転中の車両のドライバーを補助する方法であって、前記望ましくない状況を回避するために、車両操舵装置に対する第1案内力が望ましいか否かを予測するステップ、そして、第1案内力が望ましい場合には、前記望ましくない状況を回避するために前記操舵装置に付与されることになる前記第1案内力を含む合計案内力を予測するステップ、予測された合計案内力と限界値とを比較するステップ、そして、該予測合計案内力が前記限界値を超える場合には、前記望ましくない状況を回避するために前記操舵装置に前記予測合計案内力を付与すべきか否かを事前に決定するステップを特徴とする方法に関する。 (もっと読む)
駐車支援装置
【課題】駐車場所の幅に応じた駐車が可能で安価な駐車支援装置を提供する。
【解決手段】車両の操舵輪3を操舵する操舵手段を備え、車両の駐車場所への駐車を支援する駐車支援装置において、駐車場所に対して所定間隔を空けて車両を走行させる際に駐車場所の幅Lを計測する計測手段を設け、計測された幅Lに基づいて左最大舵角θLと右最大舵角θRとを求め、当該左最大舵角と右最大舵角と予め決められた走行距離および走行方向でなる走行パターンに基づいて操舵輪の目標舵角を求め、目標舵角に基づいて舵角を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】 電動モータ20やモータ駆動回路32の過熱保護と操舵フィーリングの急変防止とを両立させる。
【解決手段】 加速度センサ70により検出される加速度Gに基づいて、車両が加速状態となった回数をカウントするとともに、そのカウント値から一定時間以上加速状態とならなかった回数を減算する。この加減算されたカウント値に基づいて、カウント値が大きいほど、電動モータ20の上限電流値を下げる。従って、電動モータ20やモータ駆動回路32が過熱防止温度に到達する前から、電動モータ20の出力制限を徐々に行うことができるため、従来のように操舵アシスト制限の突然の開始により操舵フィーリングが急変してしまうといった不具合を生じない。
(もっと読む)
車両の自動操舵制御装置
【課題】車両を目標走行線に追従させるための操舵角修正が頻繁になることを防止すると共に乗り心地を快適に維持する車両の自動操舵制御装置を提供する。
【解決手段】道路に配置された指標から自車が走行するべき目標走行線を設定して自動操舵を行う車両の自動操舵制御装置であって、各タイヤにタイヤ圧力センサを備え、各サスペンションに該サスペンションを駆動するサスペンションアクチュエータを備え、上記各タイヤのタイヤ圧力の関数で定義される操舵安定状態量が所定値となるように上記各サスペンションアクチュエータを制御するコントローラを備える。
(もっと読む)
車両のステアリング装置
【課題】 舵角比可変装置VGRSにより舵角比が大きく設定される場合に、電動パワーステアリング装置EPSの電動モータ31の追従性を確保するために車両電源電圧を昇圧してモータ駆動回路50に電源供給するものにおいて、操舵フィーリングを悪化させないように、昇圧回路60の過熱を防止する。
【解決手段】 昇圧回路60からモータ駆動回路50への電源供給路に副電源70を並列に接続し、副電源70に充電した電気エネルギーを使ってモータ駆動回路50への電源供給を補助する。昇圧温度センサ66により検出した昇圧回路温度の上昇にしたがって、副電源70からモータ駆動回路50への電源供給割合が増加するようにスイッチング素子74のデューティ比を調整する。
(もっと読む)
車両の後輪操舵制御装置
【課題】指示トー角への実トー角の追従性を向上させる車両の後輪操舵制御装置を提供する。
【解決手段】車両の左右後輪の指示トー角を設定する指示トー角設定手段119と、車両の運動状態量を検出する状態量検出手段17と、を備え、指示トー角と検出された実トー角との偏差に基づき操作量を算出し、この操作量に基づいて車両の左右後輪に設けられたアクチュエータ11を作動させることによってトー角を変化させる後輪操舵制御装置である。本装置は、偏差を積分する積分手段124と、前記アクチュエータの制御特性に起因した前記指示トー角、前記実トー角、もしくは前記偏差の変動に応じて前記積分手段の偏差の積分量を減少させる指令を行うリセット指令手段120とを備える構成とする。
(もっと読む)
後輪トー角制御装置
【課題】直動式の電動アクチュエータにストロークセンサを設けることなく実後輪トー角の検出を可能にする。
【解決手段】後輪トー角制御装置10は、電動アクチュエータ11と、実後輪トー角δractに基づいて電動アクチュエータ11を駆動制御するECU12とを備え、ECU12は、電動アクチュエータ11に設定されたレゾルバ17の検出結果に基づいて電動アクチュエータ11のストローク量を算出したうえで実後輪トー角δractを算出する。ECU12は、所定の条件のもと、電動アクチュエータ11のハウジングと出力ロッドとの相対移動がストッパにより規制されるまで左右の電動モータをトーイン側へ同時に駆動する較正駆動制御を行い、較正駆動が行われた場合、ストローク量算出部は、相対移動が規制された位置でストローク量を較正する。
(もっと読む)
電動パワーステアリング装置
【課題】電動パワーステアリング装置を制御する装置が有する記憶装置の不具合を診断する際の時間を短縮すること。
【解決手段】CPU101、ROM102、RAM103は、電動パワーステアリング装置の制御に用いられる。ROM102やRAM103は、電動パワーステアリング装置の制御に使用される情報を格納するとともに、複数のエリアに分割されている。複数のエリアは、電動パワーステアリング装置の制御における所定の処理単位毎に対応している。CPU101は、前記処理単位を実行するタイミングで、複数のエリアのうち、これから実行する処理単位に対応するエリアを診断する。また、CPU101は、前記処理単位を実行するタイミングでないときには、ROM102やRAM103に対する診断を実行しない。
(もっと読む)
操舵制御装置
【課題】インバータの出力低下を少なくとも抑制しつつ、そのインバータの発熱を抑制できる操舵制御装置を提供する。
【解決手段】インバータ13bのPWM制御におけるキャリア周波数を、搬送波生成部28がインバータ温度Tiに応じて制御する。搬送波生成部28は、インバータ温度Tiが所定のキャリア周波数低減設定温度を超えているときに、インバータ温度Tiが所定のキャリア周波数低減設定温度以下であるときよりもキャリア周波数を低く設定することにより、インバータ13bにおけるスイッチング損失を低減して当該インバータ13bの発熱を抑制する。
(もっと読む)
パワーステアリング装置
【課題】車輪の操舵力アシストを行うパワーステアリング装置を提供する。
【解決手段】本発明のパワーステアリング装置は、モータ15によって駆動する双方向ポンプ13と、アシスト力を発生するパワーシリンダ12と、パワーシリンダ12の第1油圧室及び第2油圧室とそれぞれ連通するようにバイパスするバイパス油路の開閉を行うバイパス弁4と、モータ15の駆動を制御するコントローラ16とを備え、コントローラ16は、ハンドル切り返し時に、双方向ポンプ13がポンプ連れ回り状態であることを判断し、当該ポンプ連れ回り状態と判断した場合に、高圧側シリンダから低圧側に流れ込む作動油の流量を所定値になるように前記モータの回転数を補正する。
(もっと読む)
操舵制御装置
【課題】操舵力を発生する電動モータに高出力が要求されるときに、インバータのスイッチング損失を低減することのできる操舵制御装置を提供する。
【解決手段】電動モータ1のPWM制御におけるキャリア周波数を、搬送波生成部28が電動モータ1の回転速度ωに応じて制御する。搬送波生成部28は、電動モータ1を定トルク領域よりも回転速度が高い回転速度領域で駆動するときに、電動モータ1を定トルク領域の回転速度で駆動するときよりもキャリア周波数を低く設定することにより、インバータ13bにおけるスイッチング損失を低減して電動モータ1の出力を向上させる。
(もっと読む)
車両挙動制御装置
【課題】 挙動制御アクチュエータの作動量を検出するセンサが故障した場合においても、望ましくない車両挙動を発生させ難くした車両挙動制御装置を提供する。
【解決手段】 油圧センサ26が故障することで実際には存在しない油圧差ΔPが継続して算出された場合、フィードバック積分項Iiが徐々に増大して遂には上限値Ilimを超え、ステップS26の判定がYesになる。すると、ATTS−ECU16は、ステップS29でフィードバック積分項Iiを上限値Ilimとした後、ステップS27,S28に移行して駆動電流フィードバック項Ifbや目標駆動電流Itgtの算出を行う。これにより、駆動電流フィードバック項Ifb(すなわち、目標駆動電流Itgt)の無制限な増大が防止され、ATTS13の不適切な作動に起因する望ましくない車両挙動が抑制される。
(もっと読む)
車両の出庫モード選択表示装置
【課題】駐車モードに応じて適切な出庫モードを選択する表示装置を提供する。
【解決手段】出庫モード選択表示装置は、駐車スペースへの車両の駐車形態を示す駐車モードのそれぞれに対応して、駐車スペースからの車両の出庫形態を示す出庫モードを予め記憶する出庫モード記憶手段と、車両が駐車スペースに駐車するとき、該駐車の駐車モードを判定する駐車モード判定手段と、車両が前記駐車スペースに駐車した後、該車両の乗員からの該駐車スペースからの出庫開始指示を検出する手段と出庫開始指示に応じて、出庫モード記憶手段から、該判定された駐車モードに対応する出庫モードを選択して表示する選択表示手段と、を備える。自動操舵によって駐車された場合のみならず、手動操舵によって駐車された場合にも駐車モードを判定することができる。
(もっと読む)
車両の舵角比可変装置
【課題】 操舵トルクの推定精度を向上させる。
【解決手段】 舵角比ECU50により舵角比調整モータ22を駆動制御したときに流れるモータ電流Ivgを検出し、モータ電流Ivgから操舵トルクを推定する。操舵トルクを推定するにあたって、舵角比調整モータ22の出力軸22aを微小振動させる。これにより、舵角比調整モータ22の摩擦状態が常に動摩擦となるため、モータ回転開始時におけるモータ電流Ivgの立ち上がり特性を線形にすることができる。従って、モータ電流Ivgから高精度に操舵トルクを推定することができる。推定した操舵トルクは、電動パワーステアリング装置200に供給する。
(もっと読む)
161 - 180 / 678
[ Back to top ]