
Fターム[3D232DC31]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 判定基準(a、b)を有するもの (3,077)
Fターム[3D232DC31]の下位に属するFターム
判定基準の種類 (2,725)
判定基準を変更できるもの (49)
Fターム[3D232DC31]に分類される特許
121 - 140 / 303
車両用操舵制御装置

【課題】 目標転舵角に対する実転舵角のオーバーシュートに伴う違和感を抑制しつつ、転舵反力が発生しない操舵初期において速やかに操舵反力を立ち上げることができる車両用操舵制御装置を提供する。
【解決手段】 転舵コントローラ12は、運転者が操作する操舵ハンドル1の操舵状態に応じた目標転舵角を設定し、この目標転舵角と一致するように左右前輪9,9を転舵する転舵モータ6を駆動制御する。操舵反力コントローラ11は、左右前輪9,9から転舵モータ6に付与される転舵反力に応じた操舵反力と、操舵ハンドル1の操舵角に対する転舵状態量の遅れ量に応じた操舵反力とに基づいて操舵反力指令値を設定し、操舵反力指令値に基づいて操舵ハンドル1に操舵反力を付与する操舵反力モータ4を駆動制御し、遅れ量の方向が反転した場合には、反転しない場合よりも遅れ量に応じた操舵反力を抑制する。
(もっと読む)
車両用操舵制御装置

【課題】高転舵負荷時、転舵アクチュエータの余力を確保しつつ、運転者に転舵意思がある場合には、瞬間的に大きな転舵トルクを出して運転者の意図した方向への車両走行を可能にする車両用操舵制御装置を提供する。
【解決手段】操舵ハンドルとは機械的に切り離され、左右前輪9,9を転舵する舵取り機構8に設けられ、左右前輪9,9に転舵トルクを付与する転舵モータ6と、転舵指令角に基づいて前記転舵モータ6を駆動する転舵コントローラ12と、前記転舵モータ実電流Iが第1閾値以上となった場合、転舵トルクを減少させるように転舵指令角を減少補正する転舵指令角減少補正手段と、運転者の転舵意思の有無を判定する転舵意思判定手段と、転舵指令角が減少補正された後、運転者に転舵意思があると判定された場合、転舵トルクを増加させるように転舵指令角増加補正手段と、を備える。
(もっと読む)
車両の挙動制御装置
【課題】 車両諸元が車両モデルを構築したときの車両諸元と相違した場合に、車両挙動制御が早期に開始されたり、車両挙動制御により発生させられるヨーモーメントが大きくなることを防止する車両挙動制御装置を提供すること。
【解決手段】 車両挙動制御装置は、目標ヨーレートと実ヨーレートとの偏差であるヨーレート偏差Yrerrの大きさが不感帯deadzone以上であるとき、ヨーレート偏差Yrerrに基づいて車両旋回状態制御量VFを算出する。車両挙動制御装置は、車両が直進走行状態にあるときの操舵角θから操舵角ズレθerr(実タイヤ切れ角偏差に相当)を取得する。そして、車両挙動制御装置は、操舵角ズレθerrの大きさが大きいほど不感帯deadzoneを大きくする。更に、車両挙動制御装置は、車両旋回状態制御量VFの大きさを操舵角ズレθerrの大きさに応じて変更する。
(もっと読む)
車両用操舵制御装置
【課題】 クラッチ締結時間の変動にかかわらずバックアップクラッチが実際に締結されたことを的確に判定することで、バックアップクラッチが実際に締結された直後からスムーズなハンドル操作モードへ移行することができる車両用操舵制御装置を提供すること。
【解決手段】 運転者が操作する操舵ハンドル1と、前記操舵ハンドル1とは機械的に切り離され、操舵ハンドル1の操作状態に応じて左右前輪9,9を転舵する舵取り機構8と、前記操舵ハンドル1と前記舵取り機構8とを締結により機械的に連結するバックアップクラッチ5と、前記バックアップクラッチ5の開放状態で、前記バックアップクラッチ5の締結条件が成立すると、前記バックアップクラッチ5に対し締結指令を出力するクラッチ締結指令手段(ステップS104)と、前記バックアップクラッチ5に対し締結指令が出力された後、前記操舵ハンドル1のトルク増加が検出されたとき、前記バックアップクラッチ5が締結状態になったと判定するクラッチ締結判定手段(ステップS105)と、を備えた。
(もっと読む)
ステアバイワイヤシステム
【課題】転舵機構に転舵力を与える2つのモータを備えるステアバイワイヤシステムにおいて、各モータの駆動電流を検出する電流センサの故障を誤りなく検出できるステアバイワイヤシステムの提供。
【解決手段】転舵機構7に転舵力を与える電動モータM1及びM2と、電動モータM1及びM2に駆動電流IM1及びIM2をそれぞれ供給する転舵電子制御ユニットECU1及びECU2と、駆動電流IM1及びIM2をそれぞれ検出する電流センサS1及びS2とを備えるステアバイワイヤシステムにおいて、転舵電子制御ユニットECU1及びECU2の両者へ供給する電流IP0を検出する電流センサS0と、電流センサS1及びS2それぞれの出力I1及びI2の絶対値の和と電流センサS0の出力I0の絶対値との偏差を求め、該偏差と基準値との比較に基づき電流センサS1,S2及びS0の故障を検出する手段とを設けた。
(もっと読む)
電動パワーステアリング装置
【課題】ウォーム減速機のウォームとウォームホイールの歯間のバックラッシュを動的に制御し、操舵性およびギヤの寿命を低下することなく、ラトルノイズを抑制できるように改良した電動パワーステアリング装置を提供する。
【解決手段】ステアリング機構に入力された操舵トルクに応じて操舵補助用モータを駆動し、該操舵補助用モータの回転をウォームとウォームホイールとからなる減速機構を介してステアリング機構に伝達することにより、操舵を補助する電動パワーステアリング装置において、操舵が中立状態であるか否かを判別するための操舵中立状態判別手段と、操舵中立状態判別手段から出力された指令信号に基づいて、ウォームとウォームホイールの歯を当接させるためのギヤ歯当接手段とを備え、操舵中立状態判別手段が、操舵が中立状態であると判別された場合にのみ、ギヤ歯当接手段を作動させてウォームとウォームホイールの歯を当接させるようにした。
(もっと読む)
電動パワーステアリング装置
【課題】ウォーム減速機におけるギヤ間のバックラッシュを動的に制御することにより、操舵性およびギヤの寿命を維持しつつ、ラトルノイズの発生を抑制するようにした電動パワーステアリング装置を提供する。
【解決手段】ステアリング機構に入力された操舵トルクに応じて電動モータを駆動し、該電動モータの回転をウォームとウォームホイールとからなる減速機構を介してステアリング機構に伝達することにより、操舵を補助する電動パワーステアリング装置において、操舵が中立状態であるか否かを判別するための操舵中立状態判別手段と、操舵中立状態判別手段から出力された指令信号に基づいてウォームをウォームホイール側に付勢するウォーム付勢手段とを備え、操舵中立状態判別手段が、操舵中立状態であると判別した場合にのみ、ウォーム付勢手段を作動させるようにした。
(もっと読む)
電動パワーステアリング装置
【課題】応答性が損なわれることがなく、また、モータに異音が発生し難い昇圧制御を行なう電動パワーステアリング装置の提供。
【解決手段】操舵部材(図示せず)に加わる操舵トルクを検出するトルクセンサ10と、操舵部材の操舵角速度を検出する操舵角速度検出手段12,30と、トルクセンサ10が検出した操舵トルクに基づき、駆動回路13により操舵補助用のモータ24を駆動制御する手段12と、操舵角速度検出手段12,30が検出した操舵角速度が所定角速度以上のときは、駆動回路13に印加する電圧を所定電圧に上昇させる昇圧手段12,13とを備える電動パワーステアリング装置。検出した操舵角速度に基づき操舵角加速度を演算する演算手段12を備え、昇圧手段12,13は、演算手段12が演算した操舵角加速度に応じた昇圧速度で、駆動回路13に印加する電圧を上昇させる構成である。
(もっと読む)
車両の操舵装置
【課題】 操作部と転舵輪とを機械的に連結する連結手段の誤動作に確実に対応して転舵輪を転舵制御するステアリングバイワイヤ方式の車両の操舵装置を提供すること。
【解決手段】 連結装置30は、ハウジング31内に収容された入力シャフト33と出力シャフト34を備えている。また、連結装置30には、入力シャフト33の変位に伴って変化する渦電流などの物理量に基づいてシャフト33の変位量を検出するギャップセンサ44が組み付けられている。そして、電子制御ユニット45は、ギャップセンサ44から出力された入力シャフト33の変位量に対応する出力電圧Vgapに基づいて、連結装置30が連結状態であるか否かを判定する。この判定によって連結装置30が連結状態であれば、電子制御ユニット45は、転舵アクチュエータ24への駆動電流の供給を遮断し、同アクチュエータ24の作動を停止させる。
(もっと読む)
電動パワーステアリング装置
【課題】操舵フィーリングの悪化を招くことなく、戻し操舵時の収斂性の向上を図ることができる電動パワーステアリング装置を提供すること。
【解決手段】切り込み操舵がされていないときには、第1位相補償処理部および第2位相補償処理部では、周波数応答特性において1〜10Hzの周波数帯域におけるゲインが1Hzよりも低い周波数帯域および10Hzよりも高い周波数帯域(10〜100Hz)におけるゲインよりも低くなるような位相補償処理が行われる。これにより、高周波帯域でのゲインを確保することができるので、戻し操舵の開始時における操舵補助力が不足するのを防止することができ、ステアリングホイールの引っ掛かり感の発生を回避することができる。また、1〜10Hzの周波数帯域におけるゲインを下げることによって収斂性の向上を図ることができる。
(もっと読む)
パーキングアシストシステムおよびパーキングアシストシステムの作動方法
活性化信号を検出するための手段(42)、自動車(1)の配向が変化されるべきである変化方向を求めるための手段(47)、パーキングアシストシステム(3)の活性状態において少なくとも1つのアクチュエータ(38)を、設定された駆動方向が前進方向であるとき、自動車(1)の操舵輪(15)が変化方向に操縦され、かつ設定された駆動方向が後退方向であるとき、自動車(1)の操舵輪(15)が変化方向とは反対方向に操縦されるように制御する制御ユニット(40)を有している、自動車(1)の、パーキングスペース(2)での配向を支援するための自動車(1)のセミオートマチックパーキングアシストシステム(30)の作動方法およびセミオートマチックパーキングアシストシステム(30)。 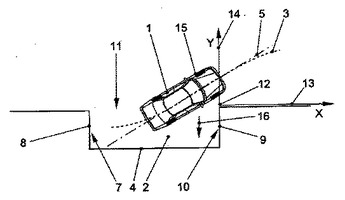 (もっと読む)
(もっと読む)
電動パワーステアリング装置
【課題】トルクセンサにより検出される操舵トルクを用いることなく操舵補助用のモータを駆動制御することにより、トーションバーの捩れに起因する応答遅れを排除し、良好な操舵フィーリングが得られるようにする。
【解決手段】ステアリングホイール30の操作により生じる操舵角を検出する操舵角センサ4と、操舵軸としてのラック軸1に加わる軸力を検出する軸力センサ5とを備え、操舵角センサ4及び軸力センサ5の検出結果が与えられるアシスト制御部7の制御動作により、操舵角及び軸力に基づいて算出される目標補助力を得るべく操舵補助用のモータ6を駆動するように構成する。
(もっと読む)
車輌の操舵制御装置
【課題】車輌のコントロールが困難になるような状況に於いては車輌の前後方向をできるだけ路面の傾斜方向に近づけることにより、傾斜路に於ける車輌の走行性能を向上させる。
【解決手段】車輌の前後加速度Gxに基づいて、車輌が登坂の向きにあるか(S30)、車輌が降坂の向きにあるか(S130)の判別が行われ、車輌が登坂の向き又は降坂の向きにあると判別されたときには、車輌の横加速度Gyに基づいて路面の傾斜度合及び路面の傾斜方向に対する車輌の前後方向の偏差が判定され、車輌の前後方向が路面の傾斜方向に近づく方向へ変化するよう、路面の傾斜方向に対する車輌の前後方向の偏差の大きさに応じて操舵アシストトルク若しくはステアリングギヤ比若しくは左右の前輪10FL及び10FRの舵角が制御される(S40〜100、S140〜200)。
(もっと読む)
車両用操舵支援装置
【課題】車両が走行車線から逸脱する恐れのある場合において、車両を迅速かつ確実に走行車線に復帰させることができる車両用操舵支援装置を提供する。
【解決手段】走行車線TLの中心線LCに対する車両1のレーンオフセットDが所定の閾値を越えていて、車両1が走行車線TLから例えば左側に逸脱する恐れのあるときには、操舵支援の方向が本来の右方向への切り増し方向に保持される。従って、ハンドルを右方向に切り増すように転舵させてゆく操舵支援の際の大きめに設定された操舵トルクが車両1の操舵機構に付与されるため、車両1は迅速かつ確実に走行車線に復帰する。
(もっと読む)
車両用操舵支援装置
【課題】運転者が意図的に転舵操作している際の操舵感覚を改善することができる車両用操舵支援装置を提供する。
【解決手段】ドライバによるステアリングホイールの操舵方向が走行車線TLのカーブの方向と一致し、ドライバが走行車線TLのカーブの方向に意図的にハンドルを切り増して転舵操作している際には、操舵支援の方向が本来の切り戻しの方向から強制的に切り増しの方向へ切り替えられ、ハンドルを切り増すように転舵させてゆく操舵支援の際の操舵トルクが車両の操舵機構に付与される。このため、運転者は違和感のない操舵感覚を得ることができる。
(もっと読む)
車両用操舵制御装置
【課題】ハンドル切り返し状態を推定可能にして、適切な操舵性能を得ると共に、ステアリング軸反力トルクの微分値を正しく演算することで正確な路面反力トルク推定値を得る。
【解決手段】車両用操舵制御装置において、ステアリング軸に生じるステアリング軸反力トルクを検出するステアリング軸反力トルク検出器14、および操舵操作がハンドル切り返し状態であることを推定する第1の操舵状態検出手段17を備え、第1の操舵状態検出手段17は、あらかじめ定めた所定の値を操舵機構が持つ摩擦トルクに応じた値としてあらかじめ記憶する摩擦トルク信号器24と、ステアリング軸反力トルクと路面反力トルクの差の絶対値を、摩擦トルクに応じた値と比較する第1の操舵状態演算手段27を具備し、第1の操舵状態演算手段27の出力に基づいて操舵操作がハンドル切り返し状態であることを推定するようにしたもの。
(もっと読む)
パワーステアリング装置
【課題】 ポンプアッセンブリーPAが個々のI−Q特性を有していても、確実に必要流量を制御するパワーステアリング装置を提供することである。
【解決手段】 コントローラCは、演算部21で演算した理論値を修正する補正指令部22を備え、この補正指令部22には、理論的電流指令値TIと理論的制御流量QP’との相対関係、及び制御流量QPと実機ごとに特定した修正電流指令値SIとの相対関係に基づいて作成した修正テーブル23を記憶するとともに、この補正指令部22は、上記修正テーブル23に基づいて、理論的電流指令値TIから修正電流指令値SIを特定し、この修正電流指令値SIに応じて可変オリフィスaのソレノイドSOLの励磁電流を制御する。
(もっと読む)
車輌用操舵制御装置
【課題】伝達比可変装置の目標相対変位量の大きさが小さい状況に於いても伝達比可変装置の相対変位量検出手段の異常を誤判定なく正確に判定し、相対変位量検出手段の異常に適正に対処する。
【解決手段】転舵角可変装置30の相対回転角度θreが目標相対回転角度θretになるよう制御され(S20〜50、100)、相対回転角度θreが実質的に0であると判別されると(S60)、車輌の旋回状態量の変化率に基づいて操舵輪のセルフアライニングトルクの変化率が判定され、セルフアライニングトルクの変化率の大きさが大きい状況に於いて回転角度センサ44により検出される相対回転角度θreの変化率の大きさが小さいか否かにより回転角度センサ44に異常が生じているか否かの判別が行われ(S80、90)、回転角度センサ44に異常が生じていると判別されると、転舵角可変装置30がそのロック装置によりロックされる(S110)。
(もっと読む)
車両の電動パワーステアリング装置
【課題】 電動パワーステアリング装置において、温度低下に伴う減速機構内のバックラッシュの不適切な変化を、簡単かつ安価に解消する。
【解決手段】 ECU40は、イグニッションスイッチの投入後に、電動モータ20の温度を測定することにより、減速機構30部分の温度を検出する。そして、検出温度が所定温度よりも低いとき、操舵ハンドル11を回転させないように、短い周期の正負の電流で電動モータ20のコイルを通電して、電動モータ20の温度を上昇させる。電動モータ20の温度上昇は、減速機構30に伝達されて減速機構30を暖めて、温度とは無関係に減速機構30内のウォームギヤのバックラッシュを適切に保つ。操舵トルクセンサ41および車速センサ42によって検出された操舵トルクおよび車速に基づいて、操舵ハンドルの操舵操作時および車両の走行時には前記電動モータのコイルへの通電を停止する。
(もっと読む)
操舵装置
【課題】カーブ出口において適切な操舵制御を行うことができる操舵装置を提供することを課題とする。
【解決手段】走行路検出手段20,21と、走行路の所定位置からのずれ量を検出するずれ量検出手段20,21と、当該ずれ量を積分して積分項を求める積分手段30と、ずれ量及び積分項に基づいて操舵機構を制御するための操舵出力を演算する演算手段30とを備え、車両が走行路の所定位置に沿って走行するように操舵機構を制御する操舵装置1において、カーブ半径検出手段20,21と、車両位置がカーブ路の出口か否かを判断するカーブ出口判断手段30と、車両進行方向検出手段30とを備え、カーブ半径が所定半径以上のカーブ路を走行中に車両位置がカーブ路の出口と判断した場合、車両進行方向と積分項に基づく操舵制御方向とが一致するときに積分項をリセットすることを特徴とする。
(もっと読む)
121 - 140 / 303
[ Back to top ]