
Fターム[3D232DC31]の内容
走行状態に応じる操向制御 (73,124) | 信号処理 (9,699) | 判定基準(a、b)を有するもの (3,077)
Fターム[3D232DC31]の下位に属するFターム
判定基準の種類 (2,725)
判定基準を変更できるもの (49)
Fターム[3D232DC31]に分類される特許
101 - 120 / 303
道路区画線種別判定装置、及び、道路区画線認識装置
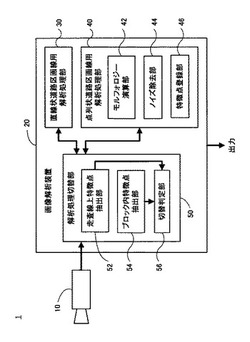
【課題】簡易な構成により撮像手段に撮像された道路区画線の種別を適切に判定することが可能な道路区画線種別判定装置を提供すること。
【解決手段】車両周辺を撮像する撮像手段を備え、撮像手段に撮像された道路区画線が、道路に直線状に描画された直線状道路区画線と、道路に点列状に敷設又は描画された点列状道路区画線と、のいずれであるかを判定する道路区画線種別判定装置であって、撮像手段の撮像画像上で道路幅方向に相当する方向に延在する複数の走査線を並べて設定すると共に複数の走査線上で特徴点を抽出する走査線上特徴点抽出手段を備え、走査線上特徴点抽出手段により所定点数以上の特徴点が抽出された走査線が、複数の走査線が並べられた方向に連続して所定本数以上存在する場合に、撮像手段の撮像画像上の道路区画線が直線状道路区画線であると判定することを特徴とする。
(もっと読む)
車線維持支援装置

【課題】運転者に応じて最適な走行ラインを設定すること。
【解決手段】車線維持支援装置10は、車両が走行する道路上の走行車線を認識する走行車線認識手段1aと、走行車線認識手段1aにより認識された走行車線に基づいて、走行車線内において目標となる目標走行ラインL1、L2を設定する走行ライン設定手段1bと、走行ライン設定手段1bにより設定された目標走行ラインL1、L2に基づいて、車両の操舵を制御する操舵制御手段2と、車両の運転者の視線方向P1、P2、P3を検出する視線検出手段1cを備えている。走行ライン設定手段1bは、視線検出手段1cにより検出された運転者の視線方向P1、P2、P3に基づいて、目標走行ラインL1、L2を設定する。
(もっと読む)
車両用制御装置
【課題】操舵比の変更を適-切に行なうことが可能な車両用制御装置を提供すること。
【解決手段】ステアリングホイールの操作量に対する車輪の操舵角の変化量の比率である操舵比を変更可能な操舵手段と、自車両が道路外に在るか否かを判定する道路内外判定手段と、を備え、道路内外判定手段により自車両が道路外に在ると判定されたことを含む所定条件を満たす場合に、操舵手段の操舵比を大きく変更することを特徴とする、車両用制御装置。
(もっと読む)
操舵装置
【課題】車両のヨー方向の減衰特性を変化させて、車両の収斂性を向上することができる操舵装置を提供すること。
【解決手段】前後輪操舵車1の旋回中における前後輪操舵車1の旋回中心位置を車両前後方向に移動させる前輪操舵装置21および後輪操舵装置22と、前後輪操舵車1の旋回中における操舵状態が切り込み状態か切り戻し状態かを判断する操舵状態判断部とを備える操舵装置2であって、前輪操舵装置21および後輪操舵装置22は、操舵状態判断部により、切り戻し状態であると判断されると、切り込み状態であると判断されるよりも、旋回中心位置を車両前後方向において後方に移動させる。これにより、前後輪操舵車1のヨー方向における減衰特性が向上し、この前後輪操舵車1の収斂性が向上する。
(もっと読む)
車両運動制御装置
【課題】車両に対する障害物を事前に判断し、様々な走行情報を加味して回避走行全般に亘り、ドライバの操作、意志を的確に反映して自然に各車両挙動の制御装置が適切に動作し、障害物の回避走行を適切に行う。
【解決手段】路面摩擦係数、路面勾配の路面情報、自車両と障害物の相対的な運動を考慮し自車両が制動操作のみで障害物を回避できるか判定し、自車両の障害物に対する回避操作の状態を判定する。そして、自車両の制動操作のみで障害物を回避できない場合で且つ自車両の障害物に対する回避操作が行われている際、ハンドル操作と車両挙動に応じ回避走行モードに移行する。回避走行モード中はハンドル操作と車両挙動の変化に応じ必要な制御を車両挙動制御部に実行させ、回避走行モードの解除はドライバのハンドル操作による回避走行終了を検出し、或いは、障害物回避後の車両挙動の安定を検出し行う。
(もっと読む)
車両の操舵制御装置
【課題】装置やメンテナンス性の複雑化を招くことなく確実に偏走を抑制する。
【解決手段】操舵制御部20は、ハンドル角θH、ハンドル角速度(d2θH/dt2)、前輪7fl、7frに作用するトルクTH、ヨーレートψに基づき自車両が偏走しているか否かを判定する。そして、自車両が偏走している場合には、前輪7fl、7frに作用するトルクTHに基づいてキングピン軸回りトルクMを演算し、このキングピン軸回りトルクMから偏走パラメータとしての前輪7fl、7frに作用する推定横力Fyを演算して、この推定横力Fyから目標前輪舵角δftを演算し、目標前輪舵角δftと現在のハンドル角θHに基づいて舵角補正量θMを演算して、モータ駆動部21にモータ回転角θMの信号を出力する。また、操舵制御部20は、偏走が発生した場合には警告灯22を点灯させる。
(もっと読む)
操舵角制御装置
【課題】ユーザーの誤操作によって無駄に車両のメカ及びタイヤに負担をかけるようなことがない四輪独立操舵機構用の操舵角制御装置を提供する。
【解決手段】本発明は、四輪独立操舵機構を有し、前輪のみの操舵による通常モードと、前輪後輪が同方向に操舵され、車両が平行移動する平行移動モードと、前輪がハの字状、後輪が上下逆のハの字状に操舵され、その場で車両が回転する回転モードを備える操舵角制御装置に関するものであり、各モードを選択するスイッチ6と、遅延タイマ8と、車輪の駆動を行うアクチュエータ9と備えており、運転者によってあるモード選択スイッチ6が押下されると、当該モード選択スイッチが所定の時間押下され続けていることを遅延タイマ8で計時した上で、アクチュエータ9によって車輪の操舵角の変更を行うようにECU5が制御を行う。
(もっと読む)
運転支援装置およびプログラム
【課題】障害物との接触を回避しやすくする支援装置を提供する。
【解決手段】通過領域内に障害物が位置している場合に、パワーステアリング装置100がステアリング110に付与するアシストトルクのうち、車両の進行方向を非回避操舵方向に向けるための操舵方向に対するアシストトルクが、通常の状態よりも小さくなるように設定変更される(s160)。これにより、車両の進行方向を障害物へ向けてしまうようなステアリング110の操舵は、上述した設定変更がなされないものと比べて、通常よりも大きな力で行わなければならない状態となる。その結果、車両の進行方向を障害物へ向けてしまうようなステアリング110の操舵が速やかに行われなくなるため、車両が障害物へ向かってしまうことを効果的に防止することができる。
(もっと読む)
多軸車両及びその操舵制御装置
【課題】 6輪車両や8輪車両のように3軸以上の車軸を有する多軸車両において、簡単な構成で小回り性能を向上させる。
【解決手段】 前方車軸22と後方車軸28の間に配置された1以上の中間車軸24、26に設けられた中間駆動輪34L、R、36L、Rを使って旋回を行なう。旋回を行う時、旋回外側の中間駆動輪34L、36Lの速度Voutを車速V0より高く制御し、かつ、旋回内側の中間駆動輪34R、36Rの速度Vinを車速V0より低く制御し、同時に、旋回内側の後方又は前方車輪36R又は32Rに制動をかける。旋回時、中間駆動輪34L、R、36L、R以外の駆動輪32L、R、38L、Rへの動力伝達を切って、これらの駆動輪を遊動状態にする。
(もっと読む)
車両の操舵装置
【課題】 運転者による操舵ハンドル操作に対する車両の旋回挙動変化を適切に制御して、車両の運転を易しくした車両の操舵装置を提供すること。
【解決手段】 転舵角変換部53は人間が知覚し得る見込み横加速度Gdに応じて感覚適合転舵角δaを計算する。制限転舵角演算部44は、車速Vが小さいときには、転舵ギア比D(θ)を転舵ギア比MDで制限することにより、ヨーレートゲインYgの増大を制限した制限転舵角δb1を計算する。また、車速Vが大きいときには、ヨーレートゲインYgをヨーレート定常ゲインYg0で制限した制限転舵角δb2を計算する。転舵角決定部45は、感覚適合転舵角δa、制限転舵角δb1,δb2のうちで、ヨーレートゲインYgの小さい転舵角を目標転舵角δcとして決定する。これにより、ヨーレートゲインYgの増大に伴う車両の旋回挙動の変化を適切に制御して、車両を旋回させることができる。
(もっと読む)
車両の操舵装置
【課題】 運転者による操舵ハンドル操作に対する車両の旋回挙動変化を適切に制御して、車両の運転を易しくした車両の操舵装置を提供すること。
【解決手段】 最大操舵角計算部41は車速Vとべき乗関係にある最大操舵角θmax(V)を計算する。変位−トルク変換部42は操舵角θを用いて操舵トルクTdを計算し、トルク−横加速度変換部43は操舵トルクTdとべき乗関係にある見込み横加速度Gdを計算する。この場合、計算部41における車速Vのべき指数nは変換部43における操舵トルクTdのべき指数Kの逆数以下の値に設定される。これにより、ヨーレートゲインYgの車速Vの変化に対する変化特性を運転者が車両を容易に旋回させることができるように変更することが可能となる。これにより、ゲインYgの増大を効果的に抑制することができる。したがって、車両の旋回挙動変化を適切に制御して車両の運転を易しくできる。
(もっと読む)
車両の操舵装置
【課題】 前後左右輪の転舵に異常が生じたときにも、ヨーレートおよび横加速度が目標値となるように制御が可能であり、車両の挙動がより安定する車両の操舵装置を提供すること。
【解決手段】 左前輪FWが失陥したときに、失陥して転舵不能となっている左前輪FWの転舵角を補うように右前輪FW2を転舵して、ヨーレートおよび横加速度が目標ヨーレートおよび目標横加速度となるようにする(S114a)。これにより、失陥時であっても複数の車両挙動状態量(ヨーレート、横加速度)を制御することができ、車両挙動の安定化を図ることができる。
(もっと読む)
産業車両の操舵装置
【課題】 操舵装置において、不感帯幅を適切に設定して駆動装置の出力を制御できるようにする。
【解決手段】 判定手段は、入力角と出力角との偏差がハンドルの回転に起因するものであるか、転舵輪の回転に起因するものであるかを判定する。
制御手段は、偏差が絶対値として所定値以上であれば、偏差に比例するよう出力を算出する。ここで、判定手段により偏差がハンドルの回転に起因するものであると判定される場合、転舵輪の回転に起因するものであると判定される場合に比べ、制御手段は上記所定値を絶対値として大きくすると共に、出力を算出する際の比例係数を絶対値として小さくする。
(もっと読む)
車両の操舵装置
【課題】 操舵ハンドルと転舵輪の基準点を容易にかつ的確に一致させることができ、運転者が良好な反力を知覚できるようにすること。
【解決手段】 チェック用ECU45は、ステップS34にて検出操舵角θが第1の直進判定条件を満たすかを判定し、ステップS35にて操舵角θが第2の直進判定条件を満たすかを判定する。第1の条件のみを満たせば、ECU45は、ステップS37にて機械反力付与機構23と操舵入力軸12とを接続する電磁クラッチ22を連結制御する。そして、ステップS39にて現在の検出操舵角θおよび検出転舵角δを仮の操舵0点θkc_0および仮の転舵0点δkc_0に更新する。また、第2の条件を満たせば、ECU45は、ステップS40にてクラッチ22を再連結制御し、ステップS42にて現在の検出操舵角θおよび検出転舵角δを最終的な操舵0点θc_0および転舵0点δc_0に更新する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】路面状態や直進走行等の運転状態に関わらず常にオフセットトルクの補正を正確に行い、運転者の疲労の軽減を図り快適な操舵性能が得られる電動パワーステアリング装置の制御装置を提供する。
【解決手段】操舵トルクと車速に基づいてステアリング機構に操舵補助力を付与するモータの電流指令値を演算し、フィードバック制御で前記モータを駆動制御するようになっている電動パワーステアリング装置の制御装置において、モータの角速度及び角加速度、操舵トルク、電流指令値を入力して車両のSATの推定を行うSAT推定部と、SAT推定部で推定されたSAT推定値、車速、舵角に基づいて車両の走行状態を判定すると共に、走行状態に従って、SAT推定値に基づいてモータ電流補正値を算出して電流指令値を補正するモータ電流補正値算出部とを設ける。
(もっと読む)
電動パワーステアリング装置
【課題】操舵トルク検出値が異常値を示した場合であっても、操舵補助力を適切に付与することができる電動パワーステアリング装置を提供する。
【解決手段】操舵系に運転者の操舵負担を軽減する操舵補助力を付与する電動モータ12を備え、トルクセンサ3で検出したトルク検出値の異常が非検出であるときには、トルクセンサ3で検出したトルク検出値に基づいて電動モータを駆動制御し、トルクセンサ3で検出したトルク検出値の異常を検出したときには、操舵トルク検出手段で検出したトルク検出値に含まれる不必要な成分を除去した最適化トルク値に基づいて電動モータを駆動制御する。
(もっと読む)
車両用走行制御装置
【課題】操舵アシスト制御の解除時に安定した車両挙動を実現することができる車両用走行制御装置を提供する。
【解決手段】操舵系に運転者の操舵負担を軽減する操舵補助力を付与する操舵補助機構11を備え、操舵補助機構11による操舵補助力制御の解除要求を検出したとき、走行状態検出手段で検出した車両の走行状態(操舵トルクT、車両速度V、操舵角θ、ヨーレートφ等)に基づいて目標ヨーレートφ*を演算し、この目標ヨーレートφ*に基づいて車両のヨーレートを制御する。
(もっと読む)
車両の操舵制御装置
【課題】簡単な制御で、車両の安定性を保ちつつ、直進減速時の制動距離を短くし、また、直進加速時の加速性能を効率良く得ることを可能とする。
【解決手段】操舵制御装置23は、車両が直進制動時の際、ヨーレートγ>0の場合は、車両の左側の路面μが右側の路面μよりも高くなっていると判断し、左側の車輪を操舵制御する。また、ヨーレートγ<0の場合は、車両の右側の路面μが左側の路面μよりも高くなっていると判断し、右側の車輪を操舵制御する。一方、車両が直進加速時の際では、ヨーレートγ<0の場合は、車両の左側の路面μが右側の路面μよりも高くなっていると判断し、左側の車輪を操舵制御する。また、ヨーレートγ>0の場合は、車両の右側の路面μが左側の路面μよりも高くなっていると判断し、右側の車輪を操舵制御する。
(もっと読む)
車両状態検出装置
【課題】路面反力トルクを用いた車両状態検出装置において、運手者がハンドルを切り戻しているときにおいても、車両がアンダーステア状態であると検出してしまうという課題があった。
【解決手段】路面反力トルク検出手段101により車両のタイヤが路面から受ける実路面反力トルクを検出し、規範路面反力トルク演算手段102により車両の走行状態に基づいて規範路面反力トルクを演算し、操舵状態検出手段103により車両を運転する運転者の操舵状態を検出し、車両挙動状態検出手段104により前記路面反力トルク検出手段の出力と前記規範路面反力演算手段の出力に基づき車両の不安定挙動状態を検出するようにした車両状態検出装置であって、前記操舵状態検出手段が前記運転者の操舵状態が切り戻しであること検出したときは、前記車両挙動状態検出手段による前記車両の前記不安定挙動状態の検出を禁止するようにした。
(もっと読む)
車両用操舵制御装置
【課題】 目標転舵角に対する実転舵角のオーバーシュートに伴う違和感を抑制しつつ、転舵反力が発生しない操舵初期において速やかに操舵反力を立ち上げることができる車両用操舵制御装置を提供する。
【解決手段】 転舵コントローラ12は、運転者が操作する操舵ハンドル1の操舵状態に応じた目標転舵角を設定し、この目標転舵角と一致するように左右前輪9,9を転舵する転舵モータ6を駆動制御する。操舵反力コントローラ11は、左右前輪9,9から転舵モータ6に付与される転舵反力に応じた操舵反力と、操舵ハンドル1の操舵角に対する転舵状態量の遅れ量に応じた操舵反力とに基づいて操舵反力指令値を設定し、操舵反力指令値に基づいて操舵ハンドル1に操舵反力を付与する操舵反力モータ4を駆動制御し、遅れ量の方向が反転した場合には、反転しない場合よりも遅れ量に応じた操舵反力を抑制する。
(もっと読む)
101 - 120 / 303
[ Back to top ]