
Fターム[3D232EB04]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 操舵角、操舵量 (1,489)
Fターム[3D232EB04]に分類される特許
201 - 220 / 1,489
後輪操舵装置
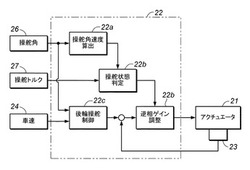
【課題】四輪操舵自動車で低速走行時にハンドル取られが生じた場合でも、車体の進行方向がハンドルが取られた方向へ助長されるのを抑制する。
【解決手段】操舵角速度算出部22aと、操舵角と操舵角速度とから操舵状態を判定する操舵状態判定部22bと、操舵角と車速とから後輪転舵の制御を決定する後輪転舵制御部22cと、操舵状態判定信号と後輪転舵信号とにより後輪の逆相制御のゲインを調整する逆相ゲイン調整部22dとを設け、操舵状態がハンドル取られ状態になったら逆相ゲインを小さくする。ハンドル取られによる車両の挙動が後輪の操舵増大により増大されてしまうことを抑制し得るため、低速走行時の前輪操舵走行状態でハンドル取られが生じても何等違和感が生じること無く運転し続けることができる。
(もっと読む)
車両の路外逸脱防止制御装置

【課題】ブレーキに対して過度な負荷が加わることなく、ブレーキ装置により発生する振動や騒音も抑制し、ステアリング制御とブレーキ制御とによりドライバに対して現状の走行状態を的確に伝達しつつ、適切に車両の路外逸脱を防止する。
【解決手段】白線からの逸脱量に応じ白線からの逸脱を防止する第1のブレーキ制御量ABL0を、障害物に対する逸脱量に応じ障害物に対する逸脱を防止する第2のブレーキ制御量ABS0を設定し、白線からの逸脱を防止する第1のステアリング制御量ASL0を、第1のブレーキ制御量ABL0が設定される逸脱量の領域よりも小さな逸脱量の領域で設定し、障害物に対する逸脱を防止する第2のステアリング制御量ASS0を、第2のブレーキ制御量ABS0が設定される逸脱量の領域よりも小さな逸脱量の領域で設定する。そして、これらを基に、ブレーキ制御量AB、ステアリング制御量ASを算出する。
(もっと読む)
車両制御装置、操舵模擬装置、及びプログラム
【課題】ドライバの触覚特性に基づく適切な操舵トルクを与えることができるようにする。
【解決手段】ステアリングの中立状態から、操舵方向が切り替わらずにステアリングが操舵されているとき、ステアリングの操舵トルクが所定値未満である範囲で、ドライバの手応え量が一定であり、かつ、操舵トルクが所定値以上である範囲で、操舵トルクの増加に従って手応え量が単調増加する、操舵トルクと手応え量との予め定められた関係に基づく、操舵角と操舵トルクの対応関係を示すマップに基づいて、操舵角センサより検出された操舵角に対応する操舵トルクを目標値として設定する。
(もっと読む)
走行支援装置および走行支援方法
【課題】検出対象を回避する必要があるかを適切に判断可能な走行支援装置を提供する。
【解決手段】車両前方を撮像する撮像手段20a,20bと、撮像手段20a,20bにより撮像された画像の情報に基づいて、画像内に存在する特徴点を抽出する特徴点抽出手段と、特徴点の移動方向および移動速度を含む移動情報を算出する移動情報算出手段と、移動情報に基づいて、検出対象を含む対象領域を抽出する対象領域抽出手段と、撮像手段20a,20bから見た検出対象の移動速度を、相対角速度として算出する相対角速度算出手段と、相対角速度に基づいて、検出対象を回避する必要があるかを判断する判断手段と、を有することを特徴とする走行支援装置。
(もっと読む)
車両用接触回避支援装置
【課題】自車と自車前方の障害物との位置関係に基づく接触余裕値を得、前記接触余裕値が閾値より小さく、かつ操向ハンドルの操作が検出されなかったとき、前記障害物に対する自車の接触回避支援を行う車両用接触回避支援装置において、バンク路の走行中に、接触回避支援処理が過剰に作動することを防止する。
【解決手段】自車10がバンクを有するカーブ路300を走行していると判断した場合には、接触回避ECUが、前方の障害物であるガードレール5との接触の可能性があると判断する接触余裕値の閾値を、より小さい値に設定するか、接触回避支援行わないようにする。
(もっと読む)
操舵制御装置及び操舵制御方法
【課題】車速が大きく高い応答性が求められる際には高い転舵応答性を確保するとともに、耐久性の低下抑制を図る。
【解決手段】操舵制御装置は、転舵輪11L,11Rの目標転舵角と実転舵角との差分を基に、トルク指令値を算出するトルク指令値演算部61と、トルク指令値を基に、駆動電流値を算出する転舵指令電流演算部62と、駆動電流値を、第1及び第2転舵モータ32,43それぞれを駆動する第1及び第2モータ駆動電流値に配分する転舵電流配分演算部63と、第1モータ駆動電流値を基に第1転舵モータ32を駆動制御すると共に、第2モータ駆動電流値を基に第2転舵モータ43を駆動制御する第1及び第2転舵モータECU60,70と、車速が小さいほど、第1モータ駆動電流値を小さく補正すると共に第2モータ駆動電流値を大きく補正するゲイン設定部64、乗算器65,66とを備える。
(もっと読む)
自動操舵機能を備えた電動パワーステアリング装置
【課題】自動操舵されるステアリングホイール位置を運転者の意図と合わせ、車両を始動時の安全性を確保し、車両を安全に駐車させることができる電動パワーステアリング装置を提供する。
【解決手段】運転席に設置された据え切り切替スイッチによるステアリングホイール位置情報を、電動パワーステアリング装置のコントローラに取り込み、車両停止状態、非操舵状態を判定し、据え切り切替スイッチで設定されたステアリングホイール位置に自動的に作動させる。
(もっと読む)
ドライバーアシスト方法
【課題】従来技術によるドライバーアシスト方法および装置の欠点を改善すること。
【解決手段】センサを用いて車両周辺が検出され、検出された車両周辺が少なくとも部分的に指示部に表示され、車両を移動させるドライブアシストが現在のポジションから出発して車両の目標ポジションに達するように行われる、車両に対するドライブアシスト方法において、
目標ポジションが指示部に表示されかつ目標ポジションは入力ユニットを用いて指示部における車両周辺の表示においてシフトされるおよび/または回転され、
カメラユニットによって実際の周辺表示が作成され、実際の周辺表示に前記目標ポジションがフェードインされる
ことを特徴とする方法。
(もっと読む)
操舵制御装置及び操舵制御方法
【課題】より高い転舵応答性の発揮及び駆動する部材の耐久性の低下抑制の両立を図る。
【解決手段】操舵制御装置は、転舵輪11L,11Rの目標転舵角と実転舵角との差分を基に、トルク指令値を算出するトルク指令値演算部61と、トルク指令値を基に、駆動電流値を算出する転舵指令電流演算部62と、駆動電流値を、第1及び第2転舵モータ32,43それぞれを駆動する第1及び第2モータ駆動電流値に配分する転舵電流配分演算部63と、第1モータ駆動電流値を基に第1転舵モータ32を駆動制御すると共に、第2モータ駆動電流値を基に第2転舵モータ43を駆動制御する第1及び第2転舵モータECU60,70と、直進走行状態に近いほど、第1モータ駆動電流値を大きく補正すると共に第2モータ駆動電流値を小さく補正するゲイン設定部64、乗算器65,66とを備える。
(もっと読む)
車両用接触回避支援装置
【課題】 自動ブレーキ制御と操舵アシスト制御の的確な協調制御を行う。
【解決手段】 自車(車両10)と自車前方の障害物(車両12)との相対位置を検出する相対位置検出手段により検出された障害物(車両12)との相対位置が、自車前方の第1領域Bca内にある場合には、自動ブレーキ制御を行い、検出された障害物(車両12)との前記相対位置が、第1領域Bca外の車幅方向に広い第2領域Sca内にある場合には、操舵アシスト制御を行うようにしたので、自動ブレーキ制御と操舵アシスト制御の的確な協調制御が実施される。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の補助を行うこと。
【解決手段】車輪と車体との間に介在された能動型のサスペンション装置と、車両周囲の障害物を検出する障害物検出手段と、障害物検出手段によって検出した障害物の種類を判別する障害物判別手段と、障害物判別手段の判別結果に基づいて、傾斜角を有する仮想路面を設定する仮想路面設定手段と、仮想路面設定手段によって設定した仮想路面の傾斜角と対応させて、能動型のサスペンション装置を制御し、車体を傾斜させる車体制御手段と、障害物検出手段によって検出した障害物への接近度合いに応じて、操舵反力を制御する操舵反力制御手段とを備える。
(もっと読む)
半自律型無人車両の遠隔操縦システム
【課題】操縦者の意図した通りの高速走行を、安全に行うことができるようにする。
【解決手段】測距データに基づいて走行可能エリアを抽出するエリア抽出手段10aと、走行状態を取得する走行状態取得手段10bと、走行状態と走行可能エリアとに基づき、操縦限界を示す操縦限界情報を生成する操縦限界情報生成手段10cと、操縦限界情報を遠隔操縦装置に向けて送信する操縦限界情報送信手段10dと、操縦限界情報に基づき制限され、かつ、遠隔操縦装置から送出された操縦情報に従い、半自律型無人車両を走行させる自律走行手段10eとを半自律型無人車両に設けたこと、操縦限界情報を表示部に表示させる操縦限界情報表示手段と、操縦限界情報に基づき制限された操縦情報を生成する操縦情報生成手段と、電気通信回線を通じ、生成した操縦情報を半自律型無人車両に向けて送信する操縦情報送信手段とを遠隔操縦装置に設けている。
(もっと読む)
覚醒度調整装置及び方法
【課題】対象者が覚醒度調整の意思のある場合にのみ、覚醒度調整を行うことができる覚醒度調整装置を提供する。
【解決手段】ストレス度判断部11は、撮像カメラ1が撮像した画像から運転者の表情、行動を認識してストレス度を判断する。覚醒度判断部12は、ステアリングホイール7の操舵信号を高速フーリエ変換して操舵振幅と操舵周波数を取得する。そして、操舵振幅と操舵周波数に基づいて、低い覚醒度、或いは高い覚醒度を判断する。高い覚醒度且つストレス度大の場合、温度制御部13及びペルチェ素子4により末梢温度を上昇させて正常覚醒へ誘導する。低い覚醒度且つストレス度大の場合、温度制御部13及びペルチェ素子4により末梢温度を低下させて正常覚醒へ誘導する。
(もっと読む)
操舵制御装置及びその方法
【課題】互いに干渉しない独立した二つの操舵機構を有する操舵制御装置において、転舵輪の転舵応答性を高くする。
【解決手段】操舵制御装置は、転舵輪11L,11Rの目標転舵角を算出する反力モータECU50と、転舵輪11L,11Rの実転舵角を検出する操舵角センサ3と、目標転舵角と実転舵角との差分を基に、駆動電流値を算出する転舵指令電流演算部と、駆動電流値を、第1及び第2転舵モータ32,43それぞれを駆動する第1及び第2モータ駆動電流値に配分する転舵電流配分演算部と、第1モータ駆動電流値を基に第1転舵モータ32を駆動制御すると共に、第2モータ駆動電流値を基に第2転舵モータ43を駆動制御する第1及び第2転舵モータECU60,70と、目標転舵角と実転舵角との差分を基に、第1モータ駆動電流値を増加補正する応答遅れ補償電流演算部及び加算器とを備える。
(もっと読む)
走行支援装置及び走行支援方法
【課題】車両を、現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができるようにする。
【解決手段】車両を、基準点から仮想的に移動させ、各経路パターンの先端に設定された仮想移動点に置く仮想移動処理手段と、前記各仮想移動点を、新たな基準点とする基準点更新処理手段と、各仮想移動点において、車両を目標位置まで仮想的に移動させるための移動可能条件が成立するかどうかを判断する移動可能条件判断処理手段と、移動可能条件が成立する場合、経路を生成することができると判断する経路生成判断処理手段と、移動可能条件が成立しない場合、経路パターンを変更する経路パターン変更処理手段とを有する。前記移動可能条件が成立しない場合に前記経路パターンが変更されるので、経路を確実に生成することができる。
(もっと読む)
車両用制御装置
【課題】高グリップ性と低燃費との両立を図ることができる制御装置及び車両を提供すること。
【解決手段】車輪2のキャンバー角がネガティブキャンバーに調整されると、第1トレッド21の接地圧が増加されると共に、第2トレッド22の接地圧が減少される。これにより、高グリップ性が発揮される。一方、車輪2のキャンバー角がポジティブキャンバーに調整されると、第1トレッド21の接地圧が減少されると共に、第2トレッド22の接地圧が増加される。これにより、低転がり抵抗となり、省燃費が達成される。このように、車輪2のキャンバー角を調整することで、高グリップ性と省燃費との背反する性能の両立を図ることができる。
(もっと読む)
自動操舵式駐車支援装置の較正のための方法および制御装置
本発明は、車両操舵角のアクティブ制御のためにセットアップされた駐車支援装置の較正のための方法に関し、複数のセンサを用いてパーキングスペースを自動的に検出するステップと、検出されたパーキングスペースに基づいて目標進路を計算するステップとを含む。操舵角は算出された目標進路に従って制御可能なアクチュエータを用いて駆動制御される。さらにアクチュエータによってエラーを考慮するために、目標進路に従った制御によって生じた実際値進路を検出するステップと、前記実際値進路を目標進路とを比較するステップと、前記比較の結果として得られたエラーを確定するステップと、単調関数によって前記エラーに結合される補正パラメータを作成するステップとを備える。この補正パラメータはアクチュエータの動作に関する考慮を可能にし、操舵角の制御には、補正パラメータと設定角の組み合わせに従った制御が用いられる。  (もっと読む)
(もっと読む)
車両用操舵制御装置
【課題】運転者に与える違和感を低減しつつ、路面傾斜による車両の偏向を精度よく抑制することができる車両用操舵制御装置を提供する。
【解決手段】車両用操舵制御装置1は、ステアリングギヤ比を変化させて車両Xの操舵角を調整するVGRS2と、車両Xの操舵トルクを調整するEPS3と、を備えている。この車両用操舵制御装置1では、ECU4によって、ロードキャンバによる車両Xの偏向を抑制するようにVGRS2及びEPS3の双方がロードキャンバに基づいて制御される。よって、例えばタイヤ側からの反力でハンドル側が回転したり、運転者の意図に反してハンドル側が回転したり等するのを抑制することができる。その結果、運転者は、通常の道路を走行するのと同じ操作でロードキャンバ路を好適に走行することが可能となる。
(もっと読む)
走行支援装置及び走行支援方法
【課題】車両を、現在地から所定の位置まで容易に、かつ、確実に自動で走行させることができるようにする。
【解決手段】車両を、基準点から仮想的に移動させ、各経路パターンの先端に設定された仮想移動点に置く仮想移動処理手段と、各仮想移動点を、新たな基準点とする基準点更新処理手段と、車両を仮想移動点まで仮想的に移動させるための仮想移動条件が成立するかどうかを判断する仮想移動条件判断処理手段と、車両を目標位置まで仮想的に移動させるための移動可能条件が成立するかどうかを判断する移動可能条件判断処理手段と、仮想移動条件及び移動可能条件が成立する場合、経路を生成することができると判断する経路生成判断処理手段とを有する。仮想移動条件は、仮想移領域内に障害物が存在する場合に成立せず、障害物が存在しない場合に成立する。
(もっと読む)
パーキングスペースへの駐車支援方法及び駐車支援装置
本発明はパーキングスペースへの駐車支援方法に関しており、中間点までパーキング軌跡の第1区分に沿って車両を誘導するステップと、縦列型駐車スペースとしてのパーキングスペースまたは斜め向き駐車スペースとしてのパーキングスペースを識別するステップと、前記パーキング軌跡の第1区分に続く第2区分に沿って車両を誘導するステップとを含み、前記中間点は、縦列型駐車スペース若しくは斜め向き駐車スペースとして構成されているパーキングスペースへの当該車両の後半の駐車が可能となるように決定され、前記パーキング軌跡の第2区分は、車両が縦列型駐車スペースの存在若しくは斜め向き駐車スペースの存在に依存して誘導されるように選択される。  (もっと読む)
(もっと読む)
201 - 220 / 1,489
[ Back to top ]