
Fターム[3D232EB04]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 操舵角、操舵量 (1,489)
Fターム[3D232EB04]に分類される特許
121 - 140 / 1,489
操舵制御装置
【課題】道路状態や走行状態に応じた目標舵角を設定し、この目標舵角に近づくように操舵反力トルクの制御や、自動操舵の制御時、ドライバの操舵による負担を低減する操舵制御装置を提供する。
【解決手段】操向輪の転舵角と走行路形状に応じた転舵角である目標転舵角との差が小さくなる方向に、操向輪の転舵角が変化しているときには、操舵量に対して転舵量が大きくなるようにする。
(もっと読む)
車両の走行制御装置

【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則し且つ運転者の操舵操作の速さを考慮した目標軌跡に沿って車両が走行するよう車両の走行を制御する。
【解決手段】舵角可変装置又はバイワイヤ式の操舵装置を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S200、300)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算する。また車両の軌跡の制御を開始又は更新すべきと判定する際の運転者の操舵操作量の変化の流体圧の大きさに応じて目標舵角を補正する(S400)。そして目標舵角に基づいて操舵輪の舵角を制御する(S600)。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則し且つ走行路に適合する目標軌跡になるよう操舵輪の舵角を制御する。
【解決手段】舵角可変装置14又はバイワイヤ式の操舵装置96と、走行路の情報を取得する装置58とを備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S200、300)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算する(S500)。目標到達位置が走行路の所定の範囲内にないときには目標到達位置が走行路の所定の範囲内になるよう目標舵角を補正する。そして目標舵角に基づいて操舵輪の舵角を制御する(S600)。
(もっと読む)
車両用操舵装置
【課題】耐久性に優れた車両用操舵装置を提供することである。
【解決手段】第1及び第2の電動モータ21,22によってボールナット34を回転駆動し、ねじ軸33を有する転舵軸6の軸方向移動に変換して、転舵する。両電動モータ21,22が共通のロータコア28を有する。ロータコア28の肉厚tが、中央部283から各端部281,282に近づくにしたがって次第に薄くなる。路面反力によるラジアル荷重F1が転舵軸6の端部61に負荷されて、ねじ軸33が撓むときに、その撓みに追従して、ロータコア28が撓み、ボールナット34を径方向に変位させる(逃がす)。ボールナット34が、ねじ軸33の撓みに抗してラジアル方向に突っ張るようなことがない。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回状態量が過大になることを防止しつつ、車両の軌跡が運転者の希望に則した目標軌跡になるよう前輪及び後輪の舵角を制御する。
【解決手段】前舵角可変装置14又はバイワイヤ式の操舵装置96と、後輪操舵装置60とを備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定した時点に於ける運転者の操舵操作量及び車速に基づいて前輪の暫定の目標舵角を演算し、暫定の目標舵角に基づいて車両の旋回状態量を推定する(S350〜500)。旋回状態量の大きさが基準値を越えないときには暫定の目標舵角に基づいて前輪の舵角を制御する。旋回状態量の大きさが基準値を越えるときには基準値を越えないよう補正された旋回状態量に基づいて前輪及び後輪の目標舵角を演算し、目標舵角に基づいて前輪及び後輪の舵角を制御する(S600)。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則した軌跡になるよう操舵輪の舵角及び左右輪の前後力差を制御する。
【解決手段】運転者の操舵操作量に対する前輪の舵角の関係を変更する舵角可変装置14又はバイワイヤ式の操舵装置76を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(S350、450)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための前輪の目標舵角を演算し(S500)、一方の後輪の目標付加制動力を演算する(S1050)。そして目標舵角に基づいて前輪の舵角を制御し(S600)、目標付加制動力に基づいて後輪の制動力を制御する(S1060〜1100)。
(もっと読む)
車両用操舵制御装置
【課題】 ステアリングの操舵状態に関係なく操向輪が転舵される転舵機構の異常が発生した場合であっても、運転者に違和感を与えることのない車両用操舵制御装置を提供すること。
【解決手段】 ステアリングの操作状態に応じて操向輪を転舵する転舵手段と、ステアリングに操舵反力を付与する反力付与手段とを備えた車両用操舵制御装置において、反力付与手段は、ステアリングの操舵状態にかかわらず転舵手段により操向輪が転舵される異常を検出した場合、通常時の反力付与方向と逆方向のトルク成分を有する反力を付与することとした。
(もっと読む)
運転操作支援装置及び運転操作支援方法
【課題】運転者に違和感をより低減しつつ、回避支援をすることが可能な運転操作支援の技術を提供する。
【解決手段】障害物に対し自車両MMが緊急回避状況であると判定すると、緊急回避のための制御として操舵制御と制動制御の両方の制御を行い、自車両MMが障害物回避を完了したと判定すると、緊急回避のための制御の解除待機モードに移行し、自車両MMの車両状態が安定したと判定すると上記緊急回避のための制御を解除する。但し、上記解除待機モード中に、運転者による意図的なアクセル操作介入を検出すると、自車両MMの車両状態が安定したと判定する前であっても、制動制御のみ先に解除する。
(もっと読む)
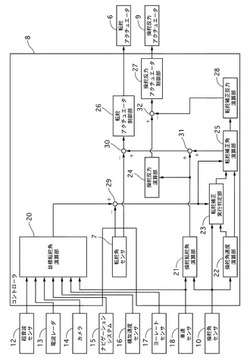
車両の制御装置
【課題】ドライバビリティの低下を招くことなく車両を目標走行路に追従させる。
【解決手段】操舵輪(FL、FR)に連結された操舵装置に操舵トルクを供給可能な操舵トルク供給手段(400)と、操舵伝達比を変化させることが可能な操舵伝達比可変手段(200、600)とを備えた車両(10)を制御する装置(100)は、車両を目標走行路に追従させるための目標状態量を設定する設定手段と、車両の状態量がこの設定された目標状態量となるように操舵伝達比可変手段を制御する第1制御手段と、前記操舵トルクとして車両を目標走行路へ追従させるにあたり操舵装置に発生する操舵反力トルクを抑制する操舵反力抑制トルクが供給されるように操舵トルク供給手段を制御する第2制御手段と、ドライバの操舵入力が生じた場合に該操舵入力に基づいて操舵反力抑制トルクを補正する補正手段とを具備する。
(もっと読む)
車両用操舵装置
【課題】センサの異常をより確実に検出することができ、且つ、製造コストの点からも好ましい車両用操舵装置を提供する。
【解決手段】車両用操舵装置1は、操舵部材に連結される入力軸18と転舵機構に連結される出力軸19との間に介在する伝達比可変機構13と、伝達比制御モータ14と、伝達比制御モータ14の回転位置を検出する第1レゾルバ31と、反力補償モータ15と、反力補償モータ15の回転位置を検出する第2レゾルバ32と、制御部と、を備える。制御部の第1判定部は、伝達比制御モータ14が制御部によって所定の回転方向に第1目標角度δ1回転された場合において、第1レゾルバ31の検出値の変化量Δθvgr1と第1目標角度δ1との差が第1基準値θ1を超えているときに、第1レゾルバ31に異常が生じていると判定する。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】切り換え超平面への収束性を良好に維持しつつ、チャタリング現象を的確に低減することが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに状態量y及び状態量の時間変化率y’を収束させる。また、初期状態の制御対象の状態量y及び状態量の時間変化率y’の収束軌跡の傾きと切り換え超平面σnの傾きとの差が大きいほど値が大きくなるように境界層φを設定し、状態量y及び状態量の時間変化率y’を切り換え超平面σnに到達させるための非線形入力θnlを、境界層φにおいて減少させる。
(もっと読む)
戦闘用装置
【課題】オペレータの人的負担を軽減しながら、オペレータの認識状況や通信環境に左右されずに、瞬時の判断及び行動を実施することを可能とした戦闘用装置を提供する。
【解決手段】自律又は遠隔操縦によって走行及びミッションが実行可能な戦闘用装置であって、車両1と、車両1周辺の環境について車両環境情報を有するデータベースと、遠隔操縦を行う場所に設置された無人機エージェント、を備え、無人機エージェントは、車両環境情報に基づいて走行及びミッションについて制御方法の選択を行う車両制御機構を有する。
(もっと読む)
駐車支援装置
【課題】表示手段において路面の状況を容易に把握しながら車体を目標位置において精度高く停車させ得る駐車支援装置を構成する。
【解決手段】車体を駐車目標エリアFに導入する駐車支援制御を行う際に駐車目標エリアFに最終停車目標位置Pxが設定されると、車体に備えたカメラで進行方向の路面を撮影した撮影画像をモニタ21に表示し、モニタ21に表示された撮影画像には指標Qが表示される。この指標Qは、車体が最終停車目標位置Pxに到達した際に、車体のバンパーの上側の輪郭30Eの形状に合致する形状で、最終停車目標位置Pxに対応する位置に重畳表示される。
(もっと読む)
車両の駐車支援装置およびそれを備える電動車両
【課題】車両の外部を撮影する撮影装置による送電ユニットの認識精度を向上させて給電設備に対する車両の駐車精度を向上させる。
【解決手段】車両100の制御装置は、給電設備200と車両100との間の距離がL1よりも大きいとき、カメラ120によって撮影される画像に基づいて給電設備200の駐車枠を認識し、上記の距離がL1以下になると、送電ユニット220の側面の画像に基づいて送電ユニット220を認識し、さらに上記の距離がL2(<L1)以下になると、送電ユニット220の上面の画像に基づいて送電ユニット220を認識する。そして、制御装置は、これらの認識結果に基づいて駐車支援制御を実行する。
(もっと読む)
スライディングモード制御装置及び車両の自動操舵制御装置
【課題】車両の自動操舵制御に適用した場合に、道路の変化に応じた最適な追従性能を得ることが可能なスライディングモード制御装置の提供。
【解決手段】スライディングモード制御装置は、制御対象の状態量yと状態量の時間変化率y’との間に非線形の関係が成立するように切り換え超平面σnを設定し、設定した切り換え超平面σnに制御対象の状態量y及び状態量の時間変化率y’を収束させる。
(もっと読む)
衝突回避支援装置
【課題】 運転者の衝突回避行動に応じた適切な衝突回避支援を実現できる衝突回避支援装置を提供する。
【解決手段】 衝突回避支援装置は、自車速Vを検出する車速センサ1と、障害物のX方向(自車進行方向に対し横切る方向)への動きである障害物移動状態(移動速度Vp)を検出するレーザレーダ4、カメラ5および画像処理装置6と、自車速Vと障害物移動状態(移動速度Vp)とに基づいて、制動回避制御と操舵回避制御の重み付けを設定する重み付け設定部11aと、を備える。
(もっと読む)
操舵制御装置
【課題】歯車機構の噛み合わせにより生じる振動によって乗員に不快感を与えることを抑制できる操舵制御装置を提供する。
【解決手段】ハンドル角θhにおいてハンドルを操舵することによる歯車機構の振動により生じる振動トルクを取得する(S303、S306)。取得された振動トルクを差分トルクtmpとし(S304、S307)、EPSモータ電流指令値Icを差分トルクtmpに基づいて補正し、補正EPSモータ電流指令値Icaを算出する(S309)。これにより、歯車機構にて生じるガタや振動が入力軸を経由してハンドルへ伝達されるのを抑制することができ、運転者の不快感を低減することができる。また、歯車機構にて生じるガタや振動を、EPSモータの駆動制御により補正可能であるので、加工時の精度管理を緩和することができる。これにより、加工コストを低減することができる。
(もっと読む)
車両の制御装置
【課題】シフトバイワイヤ機構によるパーキングレンジへの切替操作時における違和感の発生を抑制する車両の制御装置を提供する。
【解決手段】シフトバイワイヤ機構により非パーキングレンジからパーキングレンジへの切替操作が実行される際には、車両に前後方向の制動力を付与するようにステアバイワイヤ機構により車輪の方向を変化させる据え切り制御を実行するものであることから、Pスイッチ30等のシフト操作装置による操作から実際に切替が行われるまでのタイムラグにおける車両の前後方向の挙動を好適に抑制することができる。
(もっと読む)
車両の走行制御装置
【課題】車両の目標軌跡や実軌跡を求めるための車外情報の取得を要することなく、車両の軌跡が運転者の希望に則した目標軌跡になるよう操舵輪の舵角を遅れなく制御する。
【解決手段】運転者の操舵操作量に対する操舵輪の舵角の関係を変更する舵角可変装置又はバイワイヤ式の操舵装置を備えた車両の走行制御装置。車両の軌跡の制御を開始又は更新すべきと判定したときには(350、450)、その時点に於ける運転者の操舵操作量及び車速に基づいて車両が目標進行方向にて目標到達位置に到達するに必要な目標軌跡に沿って車両を走行させるための操舵輪の目標舵角を演算する(500)。そして目標舵角に基づいて操舵輪の舵角をフィードフォワード式又はフィードバック式に制御する(600)。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、移動する障害物を回避するための車体合成力及び回避軌道を導出する。
【解決手段】障害物を回避直後の速度方向及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、障害物の速度のy成分Zv、位置のy成分Z0、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を求めるために導入した第1の導入パラメータν1の特定仮定下での値ν1’との関係、第2の導入パラメータν2の特定仮定下での値ν2’との関係、障害物の回避に要する時間teの特定仮定下での時間te’との関係を定めた最短3次元マップを用いて、障害物を回避しながら設定した速度方向に移動する際、車体前後方向の移動距離を最小化する車体合成力を導出する。
(もっと読む)
121 - 140 / 1,489
[ Back to top ]