
Fターム[3D232EB04]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 操舵角、操舵量 (1,489)
Fターム[3D232EB04]に分類される特許
81 - 100 / 1,489
電動パワーステアリング装置
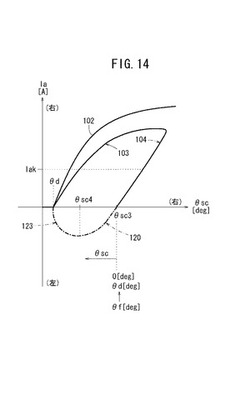
【課題】トルクセンサが故障して操舵トルクを検出することができなくなった場合において、SAT(セルフアライニングトルク)が弱い極低速域での操作子の切り戻し時の操舵力を低減する電動パワーステアリング装置を提供する。
【解決手段】残留切り戻し角θsc3が残った状態で切り込み方向のアシスト電流Iaがゼロ値近傍となったときに回転角検出部により検出されている回転子回転角θscを基準角度θfとして切り戻し回転角θscを検出し、切り戻し回転角θscと特性102とに基づき、切り込み方向とは逆方向の切り戻し方向にモータを駆動するようにしたので、操作子の操作角が中立位置に近づく方向にアシストが可能となり、戻し側の操舵力を低減して、操作子を中立位置付近に戻し易くすることができる。
(もっと読む)
車両制御装置

【課題】 特定の制御デバイスに可動範囲を超えて負荷が集中することがないよう、制御量を適切に設定する。
【解決手段】 本発明の車両制御装置(1)は、車両(10)の挙動を制御する複数のアクチュエータ(300、400、500、800)と、車両の目標運動状態に対応する目標状態量を設定し、車両の運動状態に対応する状態量が目標状態量となるようにアクチュエータの夫々の制御量を算出する制御量算出手段(100)と、複数のアクチュエータの夫々について重み係数を設定する係数設定手段(100)と、複数のアクチュエータの夫々の制御量に対して重み係数を適用した値に基づく評価関数を算出する評価関数算出手段(100)と、評価関数が所定の条件を満たす制御量を複数のアクチュエータの夫々の最適制御量として用いて、複数のアクチュエータを動作させるアクチュエータ制御手段(100)とを備える。
(もっと読む)
電動ステアリング装置
【課題】運転者にとって期待される安定した修正操舵の実施を可能とする電動ステアリング装置を提供する。
【解決手段】操舵トルクTに基づいて制御装置200Aにより制御されて操舵補助力を発生する電動機を11備えた電動パワーステアリング装置において、操向ハンドルに設けられて、運転者の操作により電気信号を出力する操作スイッチ2aL,2aRと、操作スイッチ2aL,2aRからの電気信号に応じて電動機11を駆動する電流を付加する付加電流値波形を演算して出力する付加電流演算部300Aと、を備えている。付加電流演算部300Aは、操作スイッチ2aL,2aRの運転者によるオン状態の時間の長短に関わらず、1回の操作に応じて、車両の走行状態情報に応じた所定の付加電流値IAdの電流波形を生成して出力する。
(もっと読む)
ステアバイワイヤの操舵反力制御装置
【課題】ステアリングホイールを中立位置から切り始めた際の良好な手応えを確保し、中立周りでの振動を防ぎつつ、手放し時における戻り位置を出来るだけ中立位置にするステアバイワイヤの操舵反力制御装置を提供する。
【解決手段】タイロッド間シャフト2と機械的に連結されていないステアリングホイール3に対し、操舵角センサ5と操舵反力モータ4とが設けられる。ステアリング制御手段12は、操舵角を基に、タイロッド間シャフト2を駆動する転舵機構6の転舵モータ7を制御する。ステアリング制御手段12に、操舵方向と転舵反力の方向とが異なる場合には正入力、同方向の場合には逆入力と判定し、この正逆に応じて操舵反力モータ4の操舵反力を制御する操舵反力制御部14を設ける。
(もっと読む)
車両の操舵制御装置
【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
駐車場の自動駐車システム
【課題】車両を、駐車開始位置から車両駐車スペースまで自動運転させて駐車できるようにする自動駐車システムの提供である。
【解決手段】車両8に搭載されたカメラ12が撮影した映像が、自動駐車センタ9の画像処理コンピュータ15に無線送信され、画像処理コンピュータ15は、カメラ12の映像から車両画像22と駐車場画像26とを作成し、ディスプレイ21に表示する。オペレータ25が模擬ステアリング23と模擬アクセルレバー24とを操作してディスプレイ21の車両画像22を駐車スペース画像27に駐車させたときのステアリング角度の変位とアクセルの変位とを車両8の自動駐車ECU13に無線送信し、車両8を駐車開始位置Pから駐車スペース5cまで自動運転させる。
(もっと読む)
ステアリング装置
【課題】 追加のモータを一つ備えることで、大舵角調整機能とフェールセーフ機能を同時に付加できて、追加のモータの効率的な使用が行えるステアリング装置を提供する。
【解決手段】 車台1に回転自在に支持されるサスペンションホルダ2に、このサスペンションホルダ2に対して車輪6の転舵を行わせるホルダ上転舵用支持機構5を設ける。サスペンションホルダ2と共に車輪6を転舵する第1の転舵機構7を設ける。サスペンションホルダ2に対して車輪6を転舵する第2の転舵機構8を設ける。これら各転舵機構7,8に転舵用のモータ9,10を設ける。各車輪6にインホイールモータ20を設ける。
(もっと読む)
車両の挙動制御装置
【課題】各種状態制御量の制御を介して最終的に車両状態量を制御する各種のデバイスが故障した場合において、故障したデバイスに対応する状態制御量を中立点に復帰させるまでの過渡的過程における車両挙動を安定に維持する。
【解決手段】車両の挙動制御装置(100)は、ドライバによる操舵とは無関係に前輪の舵角を変化させることが可能な前輪舵角可変手段及びドライバによる操舵とは無関係に後輪の舵角を変化させることが可能な後輪舵角可変手段のうち一方が異常状態にあるか否かを判定する判定手段と、一方が異常状態にあると判定された場合に、この一方に対応する異常側車輪の舵角を中立点に戻す舵角戻し手段と、異常側車輪の舵角を中立点に戻す過程において、異常側車輪の舵角の戻し量に応じて、異常状態にない他方に対応する正常側車輪の舵角と左右制駆動力差とを制御する制御手段とを具備する。
(もっと読む)
移動農機
【課題】圃場での作業に合わせて容易にステアリング可能な移動農機を提供する。
【解決手段】ステアリングハンドルの操舵範囲を複数の領域に分割して形成し、主に機体を旋回させる際に使用される旋回領域Bでは、ステアリングハンドルの操舵量に対する前輪の操向量の比率を、この旋回領域よりも操舵角の小さな領域である方向修正領域よりも大きく設定する。これにより、作業者は直進時には、ステアリングハンドルを方向修正用域で操舵して機体の方向を微調整すると共に、旋回時には、ステアリングハンドルを旋回領域まで操舵して、少しの操舵で機体を旋回させる。
(もっと読む)
産業車両のステアリング装置
【課題】演算処理の負担を軽減し、ハンドル操作に対するタイヤ操舵の追従性を向上させ、路面状況にも合わせて操舵処理を行う。
【解決手段】ハンドル1の回転速度がハンドル不感帯外にある場合は、ハンドル制御に移行して、ハンドル1の回転速度に応じたDUTYをステアリングモータ3に出力し、タイヤ7を旋回駆動する。一方、ハンドル1の回転速度がハンドル不感帯内にある場合は、タイヤ角保持制御に移行して、ハンドル1の回転速度が不感帯内に入った時のタイヤ角をタイヤ角指令値θrefとして保存し、タイヤ角検出値θdetがタイヤ角不感帯内にある場合は、前記ステアリングモータ3を停止して、その時点でのタイヤ角を維持し、タイヤ角検出値θdetがタイヤ角不感帯外にある場合は、タイヤ角がタイヤ角不感帯内に収まるように、ステアリングモータ3を制御する。
(もっと読む)
車両の制御装置
【課題】加減速度のある旋回に拡張したスタビリティファクタを適正化することのできる制御装置を提供することを目的とする。
【解決手段】車両が実際に旋回走行した際の互いに異なる値の三つの前後加速度を求め(ステップS2,S7,S9)、それらの前後加速度が求められた各走行時の実スタビリティファクタを求め(ステップS4)、加減速度のある旋回時に拡張したスタビリティファクタの関係式に前記前後加速度と前記実スタビリティファクタを代入して三元連立一次方程式を立てて前記係数および他の係数ならびに定数項の定数についてそれぞれの値を求め(ステップS10)、その求められた前記係数および他の係数ならびに定数項の定数を前記関係式に代入して、加減速度のある旋回に拡張したスタビリティファクタの定義式を更新する(ステップS11)。
(もっと読む)
走行支援装置
【課題】走行支援のための走行経路の演算を容易にし、計算コストを抑制する。
【解決手段】車両進行方向の周辺環境を認識し、認識した周辺環境に対する自車位置と自車姿勢を検出し、これら周辺環境、自車位置、及び自車姿勢を対応付けた情報を予め蓄積しておく。そして、蓄積された情報を自車位置に基づいて参照することで、自車両にとって走行可能な複数の走行経路を参照経路として設定すると共に、自車位置と自車姿勢に基づいて、自車位置から各参照経路に至るまでの導入経路を算出する。そして、導入経路の算出結果に応じて、複数の参照経路のうちの一つを選択し、選択した一つの参照経路と、この参照経路に至るまでの導入経路とを合わせて最終的な自車両の走行経路を設定する。
(もっと読む)
自動制御装置
【課題】操作者の意思に反して自動制御が解除されてしまうことを抑制できる自動制御装置を提供する。
【解決手段】自動制動制御手段11は、制動装置20を制御することで自動的に制動力を発生させる自動制動制御を行う。制御解除手段12は、自動制動制御中にアクセルペダル操作量が所定量以上となったと判定したことに基づいて、自動制動制御を解除させるための解除信号を自動制動制御手段11に出力する。ただし、自動制動制御中に運転者がアクセルペダル40を所定量以上踏み込んでしまった場合であっても、誤操作判定手段13により、そのアクセルペダル操作が誤操作であると判定された場合には、制御解除手段12は解除信号を自動制動制御手段11へ出力しない。よって、運転者の意思に反して自動制動制御が解除されてしまうことを抑制できる。
(もっと読む)
車両挙動制御装置
【課題】複数の車両挙動制御装置のうち一の装置が故障した場合に、車両挙動の乱れを抑制しつつ他の装置へ切り替える。
【解決手段】車両挙動制御装置は、車両(10)の複数の車両挙動制御手段(400、500、600、800)から2以上を選択して車両の挙動を制御する挙動制御実行手段(100)と、選択された車両挙動制御手段のうち少なくとも一つの車両挙動制御手段が故障したか否かを判定する判定手段(100)と、故障したと判定された場合、故障したと判定された車両挙動制御手段と切り替え可能な予備挙動制御手段を選択する選択手段(100)と、予備挙動制御手段を用いた場合に、選択された車両挙動制御手段に係る制御量の変化量を演算する演算手段(100)と、演算された変化量に基づいて、故障したと判定された車両挙動制御手段と切り替えるべき予備挙動制御手段を決定する決定手段(100)と、を備える。
(もっと読む)
車両の横方向運動制御装置
【課題】 車両挙動を安定化させつつ横方向運動制御を停止させることができる横方向運動制御装置を提供すること。
【解決手段】 横方向運動制御装置は、車両の横方向運動量の目標値に基づいて、車両の横方向運動量を変化させるために協調して作動する複数の制御対象の横方向運動制御量を演算し、演算した横方向運動制御量に基づいて複数の前記制御対象を制御する。また、複数の前記制御対象の制御を停止するか否かを判断する。複数の前記制御対象の制御を停止すると判断したときに、そのときから複数の前記制御対象の横方向運動制御量が縮退するように、複数の前記制御対象の横方向運動縮退制御量をそれぞれ決定し、決定した横方向運動縮退制御量に基づいて複数の前記制御対象を制御する。
(もっと読む)
車両運動制御装置
【課題】より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、アプリ要求や車両状態およびアベイラビリティ演算部5で演算された各制御対象のアベイラビリティを優先順位決定条件として用い、この優先順位決定条件に基づいて、制御対象の選択タイミングを判定する。すなわち、アプリ要求が出されて最初に制御対象が選択されたのち、制御対象を選択するときの優先順位を決定する条件であるアプリ要求や車両情報もしくは各制御対象のアベイラビリティが変化したときに、それに基づいて選択制御対象を再考させる。これにより、より最適な制御対象を選択して車両横方向運動制御を円滑に行うことが可能となる。
(もっと読む)
車両の横方向運動制御装置
【課題】 横方向運動制御中にドライバの操舵意図の有無を精度良く判断する。
【解決手段】 横方向運動制御装置は、車両のドライバの操舵意図の有無を判断する操舵意図判断部を備え、操舵意図判断部により操舵意図が有ると判断されたときに、制御対象制御部による制御対象の制御を停止する。また、操舵意図判断部は、車両のドライバによる操舵操作量を取得する操舵状態量取得部と、目標値に基づいて操舵操作量の閾値を設定する閾値設定部と、を備える。操舵意図判断部は、操舵操作量取得部により取得された操舵操作量の大きさと閾値設定部により設定された閾値とを比較することにより、操舵意図の有無を判断する。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】アベイラビリティ演算部5にて、アプリ情報に含まれるアプリケーションの要求に応じたアベイラビリティ変更や車両情報に応じたアベイラビリティ変更が行われるようにする。これにより、アプリケーションの要求や車両情報を反映して各制御対象のアベイラビリティを変更することが可能となり、より適切な制御対象を選択してアプリケーションの要求や車両情報に忠実な車両横方向運動制御を実行することが可能となる。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】F/B演算部7での制御対象の選択について、各制御対象のアベイラビリティである最大制御量から各制御対象のF/F要求値を引いた差から各制御対象の余裕度を演算し、この余裕度に基づいて行うようにする。これにより、余裕度がF/B要求値よりも大きな制御対象を選択して車両横方向運動制御を実行することが可能となる。したがって、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
車両制御装置
【課題】舵角センサ等を用いないコスト低減を図った構成により車両の操舵角を認識してアイドルストップ等の制御を行なう。
【解決手段】ステアリングトルクとモータアシストトルクを加算するとセルフアライニングトルク(SAT)になることに着目し、アイドルストップ車1の舵角判定部42により、ステアリングトルクおよびモータアシストトルクに基づいてセルフアライニングトルクを推定し、推定したセルフアライニングトルクに基づき、舵角センサ等を用いることなくアイドルストップ車1の操舵角を認識し、右左折時のアイドルストップのエンジン停止の禁止等を行なう。
(もっと読む)
81 - 100 / 1,489
[ Back to top ]