
Fターム[3D232EB04]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 操舵角、操舵量 (1,489)
Fターム[3D232EB04]に分類される特許
61 - 80 / 1,489
車両制御装置、車両制御方法及びプログラム
【課題】自車両が障害物と衝突した場合の被害ができるだけ少なくなるように自車両を制御する。
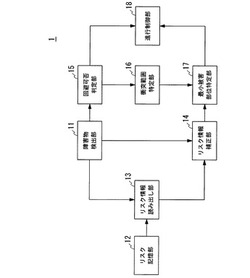
【解決手段】障害物検出部11は、自車両と衝突する可能性がある障害物を検出する。回避可否判定部15は、障害物検出部11によって障害物が検出された場合に、自車両の進行を制御することで障害物との衝突を回避できるか否かを判定する。衝突範囲特定部16は、回避可否判定部15によって障害物との衝突を回避できないと判定された場合に、障害物における自車両と衝突しうる範囲を特定する。最小被害部位特定部17は、衝突範囲特定部16が特定した範囲のうち、自車両と衝突した場合に障害物に生じる被害が最も小さい部位を特定する。進行制御部18は、回避可否判定部15によって障害物との衝突を回避できないと判定された場合に、最小被害部位特定部17が特定した部位に変形が及ぶように自車両の進行を制御する。
(もっと読む)
ステアリング装置、産業車両およびプログラム

【課題】産業車両に搭載されるステアリング装置において、ストッパーの位置関係を調整することなく、所望の旋回半径で安定的に旋回できるようにする。
【解決手段】操舵輪の操舵角が設定操舵角に到達した以降(s230「YES」)、ステアリング51への操舵トルクが制御されることで(s240)、設定操舵角を超えるような操舵輪の操舵が制限される。「設定操舵角」は、フォークリフトを所定の旋回半径で旋回させるのに適した操舵角として、設定変更可能な値であるホイルベースに応じたものが設定されるため(s220)、フォークリフトの機種などによりホイルベースが異なる場合であっても、このホイルベースを事前に設定変更しておくことにより、ホイルベースの違いに拘わらず、所望の旋回半径で安定的に旋回できるようになる。
(もっと読む)
乗用型芝刈り車両及びその制御方法
【課題】走行時におけるステアリングのふらつきを抑制することで、予期せぬ旋回を防止して旋回性や直進性を向上させることができる乗用型芝刈り車両及びその制御方法を提供する。
【解決手段】乗用型芝刈り車両1は、ステアリングホイール16の操作角度に応じて回転軸の角度が変更される後輪12と、ステアリングホイール16の操作角度を検出するエンコーダE11と、エンコーダE11の検出結果が過去の一定期間(遊び期間)に亘って予め設定された範囲(遊び範囲)内に収まっている場合には、ステアリングホイール16の操作角度をエンコーダE11の検出結果で示される操作角度に固定して後輪12を制御する制御装置34とを備える。
(もっと読む)
操舵絶対角検出装置および車両用操舵装置
【課題】検出が容易な操舵絶対角検出装置を提供する。
【解決手段】操舵軸の回転角区間(例えば1回転360°毎)にそれぞれ応じたラック軸8の軸方向区間を設けた。軸方向区間毎に仕様の異なる複数の被検出面(平坦面341〜344)を、ラック軸8の表面8bに設けた。距離検出器33が、何れの被検出面(平坦面341〜344)を検出するかによって、ラック軸8の軸方向区間(操舵軸の回転角区間に相当)を特定する。特定された回転角区間に対応する回転角基準値に、トルクセンサの第1レゾルバにより検出された回転角値を加算して、操舵絶対角を求める。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】第3車両位置予測処理(S107)によって、ステアリングホイール13の回転角速度Δδを取得してステアリングホイール13の操舵角を算出し、そのステアリングホイール13の操舵角から前輪2FL,2FRへ付与される操舵角を算出して、その前輪2FL,2FRへ付与される操舵角と車両速度とに基づいて車両1のヨーレートを推定し、その推定したヨーレートから所定時間後の車両位置を予測する。これにより、搭乗者の進行したい方向を、所定時間後の車両位置まで特定して把握しているので、予測された車両位置に基づいて走行軌道を選択することによって、搭乗者の進行した方向を正確に汲み取りながら走行予定軌道を選択して、自動走行を行うことができる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者が指示した方向に車両を自動で走行させつつ、搭乗者の指示に基づいて走行経路が選択されたタイミングとその選択された走行経路とを搭乗者に確実に把握させることができる車両および車両制御プログラムを提供すること。
【解決手段】走行制御装置100は、搭乗者により傾倒操作されたジョイスティック装置13の操作レバー13aの傾倒方向から、搭乗者が希望する車両1の進行すべき方向を判断し、車両1を進行させる走行軌道を設定する。そして、走行軌道が設定された直後、操作レバー13aを傾倒させ、その傾倒方向を、設定された走行軌道によって車両1が進行していく方向にする。これにより、搭乗者は、操作レバー13aの動きにより、指示によって走行軌道が選択されて設定されたこと、及び、選択された走行軌道によって車両1が進む方向を、確実に把握することができる。
(もっと読む)
車両および車両制御プログラム
【課題】搭乗者の進行したい方向を正確に汲み取りながら走行予定軌道を選択して自動走行を行うことができる車両および車両制御プログラムを提供すること。
【解決手段】車両の搭乗者による回転操作によって車両の操舵方向が指示されるステアリングホイール13が設けられており、新たな走行軌道を選択して設定すべき判定エリアに車両1が位置した場合は、搭乗者によるステアリングホイール13の回転操作に基づいて、車両1が操舵され(S5)、その車両1の操舵に基づいて実際に車両1に発生したヨーレートを用いて所定時間後の車両位置を第1車両位置予測処理(S7)により予測する。これにより、車両1が走行している路面の傾きに左右されることなく、搭乗者の進行したい方向を正確に把握できる。よって、搭乗者の進行したい方向を正確に汲み取りながら走行軌道を選択して自動走行を行うことができる。
(もっと読む)
車両および車両制御プログラム
【課題】操舵支援を行いながら、走行経路に沿って滑らかに車両を走行させることができる車両および車両制御プログラムを提供すること。
【解決手段】推奨軌道に沿って車両1が走行するためのハンドル13の推奨ハンドル角φiを定め、実際のハンドル角φjと推奨ハンドル角φiとの差の絶対値が大きいほど、大きな補助力Fを、ハンドル13に対して、ハンドル角が推奨ハンドル角φiへ近づく方向に付与する。これにより、搭乗者は、ハンドル13を回転操作させなくても、ハンドル13に対して付与される補助力Fの方向および大きさから、推奨ハンドル角φiへと近づけるためにハンドル13を操作すべき方向やハンドルの操作量を容易に把握できる。
(もっと読む)
加加速度情報を用いた車両の運動制御装置および方法
【課題】非定常な車両加減速状態を含む車両のダイナミクスの変化に応じて、制御ヨーモーメント量を調整すること。
【解決手段】車両のヨーモーメントを制御する制御手段を備えた車両の運動制御装置において、車両の前後方向の速度を検出する第1の検出手段と、車両の横方向の加加速度を検出する第2の検出手段と、を有し、前記制御手段は、前記第2の検出手段により検出した車両の横方向の加加速度(Gy_dot)を、前記第1の検出手段により検出した車両の前後方向の速度(V)で除した車両のヨー角加速度(r_ref_dot)に基づいて車両のヨーモーメントの制御指令を生成し、前記制御指令を出力する車両の運動制御装置。
(もっと読む)
車両運動制御装置及びプログラム
【課題】ドライバの視線と走行路との交点に到達するまでの時間が小さい状況における車両軌跡追従特性のダンピンの悪化を改善し、軌跡追従特性に優れた車両運動を実現する。
【解決手段】注視時間算出部30で、内向きカメラ12で撮像されたドライバの顔画像、外向きカメラ14で撮像された車両前方画像、及び車速センサ16で検出された車速Vに基づいて、注視時間Tを算出し、注視時間判定部32で、注視時間Tが予め定めた閾値Tthより小さいか否かを判定し、T<Tthの場合には、ダンピング変更部36で、ヨー角検出部34で検出された自車両のヨー角θと目標軌跡のヨー角θdとの差と、予め定めたダンピング特性とフィードバックゲインkp1との関係を示すテーブルに基づいて取得された必要なダンピング特性を得るためのkp1との積で表される偏差フィードバックδf_addを算出し、前輪舵角装置20へ出力する。
(もっと読む)
後輪トー角制御装置
【課題】左右の後輪のトー角を個々に制御する後輪トー角制御装置において、左右の後輪にコーナリングフォースの偏差が生じた場合にも車両の直進安定性を維持できるようにする。
【解決手段】後輪トー角制御装置10を、車両前後方向の加速度に基づいて左右の後輪5のトー角を共にトーイン若しくは共にトーアウトに制御するECU12と、左右の後輪5のコーナリングフォースを検出するための後輪空気圧センサ13とを備えるものとし、ECU12を、コーナリングパワー判定部26により左右の後輪5にコーナリングパワーの偏差が検出された場合、コーナリングフォース補正量算出部27により算出されたコーナリングフォース補正量(偏差)を低減するように、目標トー角補正部29により左右の後輪5のうち少なくとも一方の目標トー角θtを補正するように構成する。
(もっと読む)
操舵装置
【課題】ドライバが違和感を覚えることのない、ドライバの感覚に合った操舵を行うことができるようにする。
【解決手段】予め定められたハンドルの舵角と車両に発生するヨー角速度との関係を実現することにより、ドライバの視点から見た、車両の走行する目標コース上の予め定められた前方注視時間後の目標到達点の方向θgazeβと、ハンドルの基準位置の方向δswとを一致させるように定められた、ハンドルの舵角とヨー角速度ゲインとの関係を示すマップに従って、ヨー角速度ゲインの目標値を算出し、ステアリングギヤ比を制御する。ドライバの手応え量が、ヨー角速度の増加に従って単調増加する、ヨー角速度と手応え量との予め定められた関係に基づいて、検出された舵角及び取得されたヨー角速度に対応する操舵トルクを目標値として設定し、操舵トルクの目標値が実現されるように制御する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力及び回避軌道を導出する。
【解決手段】所望の位置、該位置での速度の方向、及び車体合成力の最大値を設定し、自車両の速度のx成分vx0、y成分vy0、自車両と所望の位置との距離のx成分Xe、距離のy成分Ye、及び車体合成加速度の最大値F0/mを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を求めるために導入した第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、第3の導入パラメータη3の特定仮定下での値η3’との関係を定めた低速化3次元マップを用いて、所望の位置及び速度の方向に到達するときの速度の大きさを最小化する車体合成力を導出する。
(もっと読む)
車両、自動駐車支援設備および自動駐車システム
【課題】天候や時間帯に関わらず車両を駐車スペースに精度よく誘導する。
【解決手段】車両の制御装置180は、駐車スペースに車両を自動駐車させる自動駐車制御を実行する自動駐車制御部181を含む。駐車スペースの周囲には、入口側が開口され、入口側から奥に向かって左右の間隔が狭くなるように配置されるガイド棒が設けられる。自動駐車制御部181は、当接判定部181Bと、ステアリング制御部181Cとを含む。当接判定部181Bは、自動駐車制御の実行中、タイヤ空気圧情報に基づいて各タイヤがガイド棒に当接したか否かを判定する。ステアリング制御部181Cは、当接判定部181Bによっていずれかのタイヤがガイド棒へ当接したと判定された場合、そのタイヤとガイド棒との当接を回避するように、ステアリングの自動制御を行なう。
(もっと読む)
車両の走行制御装置
【課題】車両挙動が安定した状態で且つドライバに違和感、不快感又は不安感を与えることなく軌跡制御を開始又は再開する。
【解決手段】車両の軌跡を該車両の運転者による操舵入力と無関係に変化させることが可能な軌跡可変装置を備えた車両における走行制御装置は、前記車両の軌跡が目標軌跡となるように前記軌跡可変装置を制御する軌跡制御手段と、前記車両の操舵速度を検出する操舵速度検出手段と、前記検出された操舵速度が、基準時間以上の期間について基準速度以下である場合において、前記軌跡制御手段による前記目標軌跡に応じた軌跡制御の実行を許可する許可手段と、車速が高い程低くなるように前記基準速度を設定すると共に車速が高い程長くなるように前記基準時間を設定する設定手段とを具備する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、設定されたジャークに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
【解決手段】所望の横移動距離Ye、速度の方向、現時刻の車体合成力の大きさF0、及び車体合成加速度の大きさの時間変化(ジャーク)KJを設定し、自車両の速度のx成分vx0、y成分vy0、Ye、F0/m、及びKJを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置へ到達する際の縦移動距離を最小化する車体合成力を求めるための第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、回避時間teの特定仮定下での値te’との関係を定めた3次元マップを用いて、KJに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
(もっと読む)
車両の走行制御装置
【課題】車両の旋回走行時に、転舵機構を駆動するアクチュエータ系に失陥が生じる場合であっても、適切な走行制御を維持する。
【解決手段】走行制御装置は、前輪FL、FR及び後輪RL、RRの舵角を制御可能な転舵機構15、18を有する車両10の装置であって、転舵機構を駆動させる第1転舵手段400、500、600及び第2転舵手段300、310、320、330と、第1及び第2転舵手段が転舵機構を駆動させる際の動作の態様を制御する制御手段100と、第1転舵手段において失陥が生じたことを検出する検出手段410、510、610とを備え、制御手段は、第1転舵手段に失陥が生じた場合、車両の運動状態に対応する状態量が、第2転舵手段の動作により適用可能な範囲内で設定する目標状態量となるように、第2転舵手段を動作させる。
(もっと読む)
車両の走行制御装置
【課題】ドライバ操舵との干渉による違和感を緩和しつつ、操舵入力情報を検出するデバイスの機能失陥時においても好適な軌跡追従性を確保する。
【解決手段】車両の走行制御装置は、車両の軌跡が目標路に近付くように舵角可変手段を制御する軌跡制御手段と、車両の運転者によりハンドルを介して操舵入力軸に与えられる操舵入力に関する操舵入力情報を取得する取得手段と、取得された操舵入力情報に応じて軌跡制御手段による軌跡制御の応答性を変更すると共に、操舵入力が取得出来ない場合に軌跡制御の応答性を向上させる応答性変更手段とを具備する。
(もっと読む)
車両用操舵装置
【課題】操舵用の電動モータのフェール時にも、転舵輪の向きを容易に変位することのできる車両用操舵装置を提供する。
【解決手段】電動モータ21,22のロータ31,41によって駆動されるボールナット48と、転舵軸6に設けられボールナット48にねじ結合されたねじ軸47とを含むボールねじ機構23が設けられている。転舵軸6の回転は、第1規制機構60によって規制されている。ねじ部材58は、ブッシュ26から取り外すことが可能である。ねじ部材58は、ハウジング5の第2雌ねじ部63およびロータ31の第2挿通孔64を挿通することにより、ロータ31,41の回転を規制する。このとき、ブッシュ26を回転させることにより、転舵軸6は、ボールナット48に対して回転しながら、軸方向X1に変位し、転舵輪の向きが変わる。
(もっと読む)
車両の操舵制御装置
【課題】車両挙動の安定化に係る各種の後輪舵角制御を、車両挙動の安定化に効果的に活用する。
【解決手段】後輪舵角可変装置を介して後輪の舵角δrを変化させることが可能な車両を制御する車両の操舵制御装置は、前記後輪のスリップ角βrを特定する特定手段と、前記特定されたスリップ角の信頼度を判定する判定手段と、前記特定されたスリップ角と前記判定された信頼度とに基づいて、前記スリップ角が増加する方向への前記後輪の舵角の変化を制限する制限手段とを具備する。
(もっと読む)
61 - 80 / 1,489
[ Back to top ]