
Fターム[3D232EB04]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御量) (5,762) | 操舵角、操舵量 (1,489)
Fターム[3D232EB04]に分類される特許
21 - 40 / 1,489
車両の操舵支援装置及び操舵支援方法
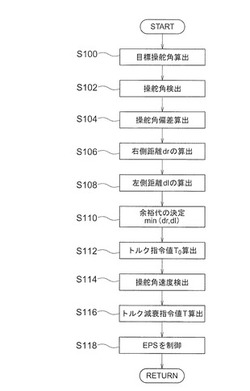
【課題】操舵操作に対する運転者の意図の反映度合いが低下することを抑制可能な、車両の操舵支援装置及び操舵支援方法を提供する。
【解決手段】自車両が有する操舵輪の目標とする回転角度である目標操舵角を算出し、操舵輪の現在の回転角度である現在操舵角を検出し、目標操舵角と現在操舵角との差分である操舵角偏差を算出し、操舵角偏差を縮小させるための操舵支援トルクを算出し、自車両が走行する走行路上において、操舵輪の回転角度を目標操舵角とした状態で自車両が通過すると予測する目標経路上の点である目標点に自車両が到達した時点における、自車両の車幅方向右側及び車幅方向左側のうち少なくとも一方に存在する障害物と自車両との間の距離である余裕代を算出し、算出した余裕代が大きいほど小さい値に算出した操舵支援トルクを操舵輪へ出力する。
(もっと読む)
車両制御システム

【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
車両用操舵装置
【課題】操舵部材のロック状態が解除された直後から、精度の高いロータ回転角を演算することができる車両用操舵装置を提供する。
【解決手段】EPSモータ制御部33の動作モードには、通常モードと強制回転モードとがある。通常モードは、ステアリングロック装置4によってステアリングホイール1の回転がロックされていない通常運転状態においてEPSモータ7を駆動制御するモードである。一方、強制回転モードは、イグニッションキーがオンされた直後において、ステアリングロック装置4によってステアリングホイール1の回転がロックされている状態で、EPSモータ7を強制的に回転駆動するモードである。EPSモータ7が強制回転モードで回転駆動されているときに、回転角演算部34は、各磁気センサ21,22が感知している磁極を特定する。
(もっと読む)
目的走行位置設定装置及び操舵制御システム
【課題】走行中の周囲の状況の変化に応じた好適な位置に目標走行位置を設定し、設定した目標走行位置で車両を走行させる。
【解決手段】操舵制御システム1のCPU16は、接近車両の有無に応じて目標走行位置を設定し、車両2が現在の走行位置から目標走行位置へ走行するために必要な操舵トルクを発生するようにモータ9を駆動する。目標走行位置は、左側の接近車両及び右側の接近車両がともに検出されない場合には、車線の幅方向の中央の標準位置に設定され、左側の接近車両のみが検出された場合には、標準位置よりも右側の右偏向位置に設定され、右側の接近車両のみが検出された場合には、標準位置よりも左側の左偏向位置に設定され、左側の接近車両及び右側の接近車両がともに検出された場合には、左側の接近車両と右側の接近車両との中間位置に設定される。
(もっと読む)
車両用走行支援装置
【課題】 車線逸脱の抑制とドライバに与える違和感の軽減との両立を図ることができる車両用走行支援装置を提供する。
【解決手段】 走行路上の自車前方に、車速Vに応じた前方注視点距離Lsだけ離れた目標走行位置Pを設定し、自車が設定した目標走行位置Pを走行するように自車の走行を支援する車両用走行支援装置において、走行路に対する自車の向きを判定する姿勢判定部14aと、自車が走行路外側を向いている場合、自車の向きが走行路と平行である場合よりも車速Vに応じた前方注視点距離のベース値Ls_baseを短縮した前方注視点距離Lsを設定する前方注視点距離設定部14と、を備えた。
(もっと読む)
駐車支援装置
【課題】駐車エリア内にある突出体の存在を考慮して駐車を支援できる。
【解決手段】 車両の駆動を制御する制御手段と、車両周囲の突出体を検出する検出手段と、前記突出体を囲む所定のエリア内に前記車両を誘導するための誘導経路を生成する生成手段と、を有する。前記制御手段は、前記誘導経路に従って前記所定のエリア内に前記車両を誘導する際、前記車両が前記突出体に所定の距離まで近づくと、前記車両の駆動を遅くする。
(もっと読む)
自動車の車体構造
【課題】車両旋廻時、車両後部が車両前部よりも旋廻外側に張り出すことを防止し、外輪差を気にすることなく運転できる自動車の車体構造を提供すること。
【解決手段】本発明の自動車の車体構造は、前輪3L,3Rの舵角θ2よりも後輪4L,4Rの舵角θ1が逆位相で相対的に大舵角とする舵角制御手段5と、右旋廻時に右側最大車体基準円11の内側に収まり、左旋廻時に左側最大車体基準円21の内側に収まる外側形状を有する車体2と、を有する。そして、右側最大車体基準円11は、右旋廻時最小回転半径の中心位置Pを中心点とし、車幅方向中心位置Oをはさんで中心位置Pと反対側の車体2上に設定する左車体基準点10を通る。また、左側最大車体基準円21は、左旋廻時最小回転半径の中心位置Qを中心点とし、車幅方向中心位置Oをはさんで中心位置Qと反対側の車体2に設定する右車体基準点20を通る。
(もっと読む)
操舵支援装置
【課題】車両がカントのある路面を走行している場合に、路面の低い側に車両を換向させるガイダンストルクが与えられたときに、操舵角速度および操舵角変化量が過度に大きくなるのを抑制することができる操舵支援装置を提供する。
【解決手段】操舵角速度閾値設定部52は、ガイダンストルク指令値TG*と車速Vとに基づいて、操舵角速度閾値Vhthを設定する。速度偏差演算部52は、操舵角速度演算部51によって演算された操舵角速度の絶対値|Vh|と操舵角速度閾値Vhthとの偏差ΔVhを演算する。ゲイン設定部54は、速度偏差ΔVhhに基づいて、ゲインGを演算する。ゲイン乗算部55は、ゲインGをガイダンストルク指令値TG*に乗じることにより、最終的なガイダンストルク指令値TG*を求める。
(もっと読む)
車両の走行制御方法及び走行制御装置
【課題】衝突回避制御に対し運転者が違和感を感じることを防止する。
【解決手段】車両制御コントローラ12が、運転者による車両1の操舵に対応する衝突回避軌道を選択し、選択した衝突回避軌道に基づいて走行するように車両1を制御する。これにより、衝突回避制御によって運転者が行っている車両操作、換言すれば運転者の反応が妨げられ、衝突回避制御に対し運転者が違和感を感じることを防止できる。
(もっと読む)
ステアバイワイヤ式操舵機構の制御装置
【課題】 車両運動モデルを導入した複雑な制御系を構築することなく、路面左右の摩擦係数の違いや横風等に対する外乱安定化制御を簡単に実現する。
【解決手段】 舵角指令の主な値となるフィードフォワード値を生成するフィードフォワード値生成手段21と、外乱補正用のフィードバックによる補正量を生成する外乱補正量生成手段22と、前記フィードフォワード値と補正量とを加算して前記転舵モータ15を駆動する舵角指令を生成する比較手段23とを有する。外乱補正量生成手段22は、車両速度とハンドル角から、車両20に生じる横加速度を演算し、外乱検出手段25による横加速度の実測値が目標値に追従するように前記補正量を演算する。
(もっと読む)
走行制御装置および車両
【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
車両用走行制御装置
【課題】車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供する。
【解決手段】車線追従制御手段(目標横位置設定部)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段(車線中央復帰意図判定部)は、運転者の操舵方向が車線の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
(もっと読む)
走行制御装置および車両
【課題】車両の速度または加速度を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両速度Vが速いほど、車両1の進行方向において仮想バンパー領域71が広くなるように形成されるので、車両1が速い速度で走行している場合に、より早い段階から進行方向にある物体80との衝突回避を行うことができる。また、車両1が減速している場合に、その減速度の大きさが大きいほど、その車両1の進行方向とは逆方向において仮想バンパー領域71が広くなるように設定される。これにより、車両速度Vが急激に遅くなる場合に、その進行方向とは逆方向にある物体80との衝突、例えば、進行方向とは逆方向からの追突を回避することができる。従って、車両1の車両速度Vまたは加速度aを考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
走行車両
【課題】旋回後の進入位置合わせを行える自動走行制御機能を備えた農業用の走行車両を提供すること。
【解決手段】ステアリングハンドルに連動して正転と逆転をするステアリングシャフト15の切れ角を検出する切れ角センサ49と該シャフト15に回転駆動力を伝達するための正逆転モータ20とモータ20の回転駆動力をシャフト15に伝達するための電磁クラッチ22を有する連動機構を備えた自動操舵装置25とカメラ53で圃場内の遠目標X及び/又は作業軌跡Tを検出してモニタ47に表示可能とし、自動スイッチの「入」操作時時に、前記切れ角センサ49が所定量のシャフト切れ角を検出して車両の旋回が行われたと判断されると、モニタ47で表示される旋回後の遠目標Xの位置情報及び/又は作業軌跡Tの位置情報に基づき自動操舵装置25のモータ20を作動させて圃場内で直進走行の自動操舵を行う制御構成を有する制御装置100を備えた走行車両である。
(もっと読む)
車両用転舵装置とその装置を用いた車両の駐車方法及び車両
【課題】駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
【解決手段】各操舵輪15に車輪の舵角を変える転舵アクチュエータ10を備えるとともに、そのアクチュエータ10の舵角を独立して制御する転舵制御手段11を備える。そして、前記制御手段11が操舵輪15の転舵アクチュエータ10を制御して、駐車の際、前記車輪15を車両の左右方向に向ける。こうすることで、転舵させた車輪と路面との間に摩擦を生じさせて車輪をロックし、車両を制動することにより、駐車用の制動装置を設けることなく、車両駐車時に車輪をロック状態に維持できるようにする。
(もっと読む)
後輪操舵車両
【課題】後輪トー角可変制御装置を備えた車両において、後輪を操舵しても操舵フィーリングを悪化させないパワーステアリング装着車両を提供する。
【解決手段】後輪操舵式の自動車1において、左右の前輪4L,4Rを転舵するステアリングホイール11と、ステアリングホイール11の作動に応じて左右の前輪の転舵をアシストするEPSトルクを付与する電動パワーステアリング装置16と、左右の後輪6R,6Lに対して設けられた左右の伸縮アクチュエータ21L,21Rを個別に駆動制御することにより、左右の後輪6のトー角を前輪4の操舵方向と同相または逆相あるいはトーインまたはトーアウトに変化させる後輪トー角可変制御装置20とを備え、電動パワーステアリング装置16は、左右の後輪6のトー角に応じてEPSトルクを増減させるように構成する。
(もっと読む)
車両操舵装置の制御装置
【課題】車両の走行経路と目標経路とのずれを小さくすることのできる車両操舵装置の制御装置を提供する。
【解決手段】左転舵輪20は、中心点Pを幅方向に通る中心軸Hj周りに、ドライブシャフト64の回転に伴って回転可能にナックル62に取り付けられている。左転舵輪20の中心点Pを径方向に通る軸Tjを、左転舵輪20の中心点Pを幅方向に通る中心軸Hj周りに回転させたときにできる回転面から、衝撃吸収機構65の中心軸Kjが、ドライブシャフト64側に傾斜角θkだけ傾斜するようにナックル62を取り付ける。この中心軸Kj周りの左転舵輪20の回転角度を転舵要素角θtとして、この左転舵輪20の向きの制御に用いる。右転舵輪についても同様である。
(もっと読む)
車両の操舵支援装置及び操舵支援方法
【課題】操舵支援トルクの急激な変化や断続的な変化を抑制することが可能な、車両の操舵支援装置及び操舵支援方法を提供する。
【解決手段】走行路における目標通過位置へ到達するまでに自車両が目標とする姿勢角及び横位置を算出する誘導状態算出部16と、誘導状態算出部16が算出した姿勢角及び横位置と、自車両の現在の姿勢角、横位置及びヨーレートに基づき、誘導経路を生成する誘導経路生成部18と、誘導経路を自車両が走行するための目標操舵角を算出する目標操舵角算出部22と、現在操舵角を検出する操舵角センサ20と、目標操舵角と現在操舵角との差分である操舵角偏差を算出する操舵角偏差算出部24と、操舵角偏差を縮小させるための操舵支援トルクを算出する操舵支援トルク算出部26と、操舵支援トルクを操舵輪へ出力する操舵支援トルク出力部32を備える。
(もっと読む)
規範応答演算装置およびそれを用いた車両用操舵装置
【課題】 規範応答のゲインおよび位相の特性を独立に設定できる規範応答演算装置およびそれを用いた車両用操舵装置を提供する。
【解決手段】 入力信号uに基づいて規範ヨー応答のベース値を演算する線形フィルタ14と、入力信号uの微分値du/dtを出力する微分器15と、入力信号uの微分値du/dtに基づいてゲインyを演算する非線形フィルタ17と、規範応答ベース値にゲインyを乗算して規範ヨー応答を演算する乗算器18と、を備える。
(もっと読む)
21 - 40 / 1,489
[ Back to top ]