
Fターム[3D233CA13]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 車両の運動状況 (4,070) | 車両の速度 (3,122)
Fターム[3D233CA13]に分類される特許
61 - 80 / 3,122
車両用走行制御装置
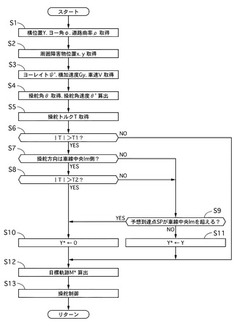
【課題】車線追従制御中、運転者が車線中央寄りに向かうことを目的として操舵操作の介入を行った場合に、運転者の操舵操作の負担を軽減することができる車両用走行制御装置を提供する。
【解決手段】車線追従制御手段(目標横位置設定部)は、運転者の車線中央lmへの復帰意図があると判定されると目標横位置Y*を車線中央lmに設定し、車線中央復帰意図判定手段(車線中央復帰意図判定部)は、運転者の操舵方向が車線の外側から中央lm側へ向かう方向であり、かつ、検出される操舵状態量(操舵トルクT)が第1の閾値よりも大きい第2の閾値(閾値T2)を越えたとき、または、検出される車両運動状態量(ヨーレートψ'、車速V)から推定される自車両MCの予想軌跡Sにおける所定の前方到達点(予想到達点)SPが車線中央lmを越えたとき、運転者の車線中央lmへの復帰意図があると判定する。
(もっと読む)
ステアバイワイヤ式操舵機構の制御装置

【課題】 車両運動モデルを導入した複雑な制御系を構築することなく、路面左右の摩擦係数の違いや横風等に対する外乱安定化制御を簡単に実現する。
【解決手段】 舵角指令の主な値となるフィードフォワード値を生成するフィードフォワード値生成手段21と、外乱補正用のフィードバックによる補正量を生成する外乱補正量生成手段22と、前記フィードフォワード値と補正量とを加算して前記転舵モータ15を駆動する舵角指令を生成する比較手段23とを有する。外乱補正量生成手段22は、車両速度とハンドル角から、車両20に生じる横加速度を演算し、外乱検出手段25による横加速度の実測値が目標値に追従するように前記補正量を演算する。
(もっと読む)
制御装置及びこれの製造方法並びに車両用操舵装置
【課題】超音波ワイヤーボンディングを良好に行うことができる制御装置を提供する。
【解決手段】ECU12が、第2ハウジング30の基板載置部47に載置されたパワー基板48と、電子部品および端子板58を保持した樹脂部材59とを備える。端子板58が、樹脂部材59に保持された第1板部75と、第1板部75の端部75aから延設されて樹脂部材59から離隔した弾性変形可能な第2板部76とを含む。仮に、パワー基板48に反り等が生じていても、超音波ワイヤーボンディング工程において、ワイヤーボンディングツール81がボンディングワイヤ74を第2板部76の表面76aに押圧したときに、第2板部76が、パワー基板48の反りに応じて弾性変形する。
(もっと読む)
電動パワーステアリング装置
【課題】アシスト開始時間を短かくすることの可能な電動パワーステアリング装置を提供する。
【解決手段】EPSの備えるマイコンは、イグニッションスイッチがオンされた後、ECUがモータを通電制御する前に、モータまたはモータ駆動回路の故障診断処理を行う。ステアリングホイールとともに回転するモータの角速度が所定値よりも大きい場合(S1:YES)、処理は、故障診断の実施を省略する(S7:YES)。これにより、イグニッションスイッチがオンされてからモータの通電制御を開始するまでの時間が短縮される。
(もっと読む)
電動パワーステアリング装置
【課題】弱め界磁制御によって軽快な操舵フィーリングを保持しつつ、弱め界磁制御が有効ではなくなって無駄な発熱が発生する事象を、モータの駆動状況に応じて回避する電動パワーステアリング装置を提供する。
【解決手段】モータの駆動状況に対応するトルク電流であるq軸電流IqがIq=Iq´に設定されたとき、モータ回転数が増加しないで発熱のみが増加するドットを付けた領域135内に電流ベクトルiを設定しないで、ハッチングで示す使用領域134内で、弱め界磁電流であるd軸電流Idが使用領域134の上限値Idlimとなる電流ベクトルkに設定する。
(もっと読む)
パワーステアリング装置
【課題】路面からの逆入力により発生する操舵機構の振動をより精度良く検出することができるパワーステアリング装置を提供する。
【解決手段】入力軸(第3コラムシャフト)に設けられ、入力軸に生じる歪振動を検出する第1歪センサと、出力軸(ピニオンシャフト)に設けられ、出力軸に生じる歪振動を検出する第2歪センサと、第2歪センサの出力信号である第2歪振動V2の位相が第1歪センサの出力信号である第1歪振動V1よりも進んでいるか否かを判断する位相判断回路84と、位相判断回路84が、第2歪振動V2の位相が第1歪振動V1の位相よりも進んでいると判断するとき、路面から操舵機構に対して作用する逆入力トルクが作用していると判断し、逆入力トルクが低減する方向に電動モータ60の駆動電流を補正する駆動電流補正回路(強化ゲイン設定回路824)と、を有する。
(もっと読む)
電動パワーステアリング装置の制御装置
【課題】スタックの解消に対してより高く貢献することのできる電動パワーステアリング装置の制御装置を提供する。
【解決手段】電動パワーステアリング装置の制御装置は、アシストモータの電流制御により転舵輪の転舵角θtを変更する自動操舵制御を行なう。そして、自動操舵制御により転舵輪のグリップが発生した転舵角θtを検出する。
(もっと読む)
路面摩擦係数推定装置及び方法
【課題】タイヤすべり角に対するコーナーリングフォースの傾きが路面摩擦係数の関数となることを利用して、路面摩擦係数を推定する。
【解決手段】タイヤの横滑り角βとコーナーリングフォースCFを算出し、前記算出されたタイヤの横滑り角βとコーナーリングフォースCFとの比ΔCF/Δβに基づいて、路面の摩擦係数を推定する路面摩擦係数推定部28を備える。前記路面摩擦係数推定部28は、路面摩擦係数μが異なる複数の路面を走行してタイヤの横滑り角βとコーナーリングフォースCFとを検出してそれらの関係を数値で若しくは数式化してメモリ29に保存しており、前記メモリ29に保存された関係を用いて、実際の走行時に路面の摩擦係数を算出する。
(もっと読む)
変位検出装置、車両用操舵装置及びモータ
【課題】検出精度を低下させることなく、装置全体としての回路規模をより縮小することができる変位検出装置、車両用操舵装置及びモータ。
【解決手段】モータ回転角センサ16は、複数のホール素子HA〜HCと、これら複数のホール素子HA〜HCを動作させるための電力供給をそれぞれ遮断可能な複数のスイッチSWA〜SWCとを備える。
(もっと読む)
車両のパワーステアリング制御装置
【課題】アシストトルクに対する補正量のピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる車両のパワーステアリング装置を提供する。
【解決手段】操舵制御部20は、ドライバによる操舵状態が切り増し状態のときと切り戻し状態のときとで選択的に切り替わる操舵ゲインG0を生成し、当該操舵ゲインG0を無次元数G0’に変換してレートリミット処理を行い、レートリミット処理後の操舵ゲインGを用いて基本アシストトルクTbを補正して最終的なアシストトルクTaを演算する。これにより、基本アシストトルクTbに対するアシスト補正量ΔTaのピークの位相を遅らせることなく、操舵状態の切り替わり時の急激な変化を抑制することができる。
(もっと読む)
車両用操舵装置及び荷役車両
【課題】操舵角に対する反力特性を適切に設定することにより、運転者の操舵負担を低減することができる車両用操舵装置及び荷役車両を提供する。
【解決手段】操舵部材10の操舵角を検出する操舵角検出部13と、操舵部材10に操舵反力を付与する反力アクチュエータ15と、少なくとも操舵角検出部13によって検出された操舵角の関数として操舵反力を設定し、その設定された操舵反力を実現するように前記反力アクチュエータ15を制御する反力アクチュエータ制御部16とを備え、反力アクチュエータ制御部16は、操舵角検出部13によって検出された操舵角が第1の切替角θh1以下の第1の舵角領域Iにあるか、第1の切替角θh1を超える第2の舵角領域IIにあるかを判定し、操舵角が第1の舵角領域Iにあるときに操舵角の増加に伴って操舵反力を最大値まで立ち上げ、操舵角が第2の舵角領域IIに入ると操舵角の増加に伴って操舵反力が前記最大値から単調に減少するように反力アクチュエータを制御する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】特に、中立位置からのステアリングホイールの切り出しにおいて、ドライバが感じるフリクション感を適切に打ち消して滑らかで良好な操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ハンドル角の絶対値|θH|が高いほど操舵する方向への基本アシストトルクTbを増大させる方向に補正する第1の補正値ΔT1を設定し、ハンドル角速度の絶対値|dθH/dt|が高いほど操舵する方向への基本アシストトルクTbを減少させる方向に補正する第2の補正値ΔT2を設定し、少なくともステアリングホイールの中立位置からの切り始めにおいて第1の補正値ΔT1と第2の補正値ΔT2との差を第1の補正値ΔT1で補正する方向におけるアシスト補正量ΔTaとして算出し、こうして求めたアシスト補正量ΔTaで基本アシストトルクTbを補正して制御量としてモータ駆動部21に出力する。
(もっと読む)
車両のパワーステアリング制御装置
【課題】パワーステアリングによりダンピング補正を精度良く適切に行って、スッキリとした操舵フィーリングを維持し、たとえ、比較的素早い切り返し操舵時等であってもドライバがしっかりステアリングホイールを握らなくても安定感のある操舵フィーリングを実現する。
【解決手段】車速Vと操舵トルクTsを基に基本アシストトルクTbを設定し、ヨーレートγとハンドル角速度(dθH/dt)とが同符号の場合は、アシスト補正量ΔTaを0とし、ヨーレートγとハンドル角速度(dθH/dt)とが異符号の場合は、ヨーレートの絶対値|γ|に基づいてダンピング補正量Gdを算出してこのダンピング補正量Gdとハンドル角速度(dθH/dt)とに基づいてアシスト補正量ΔTaを算出し、アシスト補正量ΔTaで基本アシストトルクTbを補正してアシストトルクTaとする。
(もっと読む)
電動パワーステアリング装置
【課題】モータロックを防止することにより、システムの安定的な停止が図れ、安全な電動パワーステアリング装置を提供する。
【解決手段】
マイコン17は、短絡異常検出フラグがオンの場合には、短絡異常判定検出中と判断して、積算判定を実行する。そして、マイコン17は、短絡異常確定フラグがオンの場合には、通電不良発生相以外の二相を通電相とするアシスト力を発生中に、通電不良発生相が、通電不良発生相以外の二相のうちの一相と短絡異常確定となったと判断して、アシスト力の発生を停止する。
(もっと読む)
電動パワーステアリング制御装置
【課題】高次の車輪回転振動を抑制して操舵フィーリングを向上させる
【解決手段】電動パワーステアリングシステム1は、振動抑制補償量演算部22が、電動パワーステアリングシステム1における路面反力に対するモータ6の速度の特性について、基本アシスト量を振動抑制補償量で補正せずにモータ6を駆動させた場合の特性よりも、タイヤ10が1秒間で回転する回転数と一致する周波数(以下、基本車輪速周波数という)の1,2,3,4,5倍に一致する周波数で大きさが振動する路面反力に対してモータの速度が抑制された特性となる仕様を満たすように振動抑制補償量を演算する。これにより、上記仕様を満たすように、ハンドル2の操作を補助するためのアシスト操舵力を制御するため、基本車輪速周波数の2,3,4,5倍に一致する高次車輪速周波数を有する車輪回転振動がタイヤ10からハンドル2に伝達されるのを抑制することができる。
(もっと読む)
モータ制御装置及び電動パワーステアリング装置
【課題】1シャント式でモータの電流検出を行い、作動音が少なく、トルクリップルを減少させたモータ制御装置及びそれを装填した電動パワーステアリング装置を提供する。
【解決手段】PWMの各相デューティ指令値に基づいてインバータでモータを駆動制御すると共に、1シャント式電流検出器で前記モータの各相モータ電流を検出するようになっているモータ制御装置において、インバータの電源電圧、各相デューティ指令値、モータの逆起電圧情報、電流検出器で検出された各相モータ電流、PWMの配置情報及びモータの電気的特性式より電流検出補正値を算出する電流検出補正部を具備し、電流検出補正値により電流検出器で検出された各相モータ電流をモータ平均電流に補正してモータを駆動制御する。
(もっと読む)
車両操舵装置の制御装置
【課題】車両の走行経路と目標経路とのずれを小さくすることのできる車両操舵装置の制御装置を提供する。
【解決手段】左転舵輪20は、中心点Pを幅方向に通る中心軸Hj周りに、ドライブシャフト64の回転に伴って回転可能にナックル62に取り付けられている。左転舵輪20の中心点Pを径方向に通る軸Tjを、左転舵輪20の中心点Pを幅方向に通る中心軸Hj周りに回転させたときにできる回転面から、衝撃吸収機構65の中心軸Kjが、ドライブシャフト64側に傾斜角θkだけ傾斜するようにナックル62を取り付ける。この中心軸Kj周りの左転舵輪20の回転角度を転舵要素角θtとして、この左転舵輪20の向きの制御に用いる。右転舵輪についても同様である。
(もっと読む)
モータ制御装置及び車両用操舵装置
【課題】回生制御の実行時においてもモータの各相電流値を検出することができるモータ制御装置を提供すること。
【解決手段】マイコンは、三角波δが山となるタイミングTbで上段側の各FETを全てオンにするような制御信号を出力する第1周期C1、及び下段側の各FETを全てオンにするような制御信号を出力する第2周期C2を交互に繰り返すことにより、その回生制御を実行する。そして、この回生制御の実行時、マイコンは、第1周期C1において三角波δが山となるタイミングTbで取得された各電流センサの出力値をオフセット電流値Ix0として、第2周期C2において第1周期C1と同じタイミングTbで取得された補正前電流値Ix1を補正することにより、モータの各相電流値を検出する。
(もっと読む)
車線逸脱防止装置
【課題】運転者への車線逸脱の報知と逸脱防止トルクの付与とを両立して、より確実に車両の走行車線からの逸脱を防止することが出来る車線逸脱防止装置を提供する。
【解決手段】本発明による車線逸脱防止装置(1)は、車両の走行車線からの逸脱を予測し又は逸脱を検出する車線逸脱検出手段(26)と、車両の走行車線に対する逸脱方向を検出する逸脱方向検出手段(26)と、車両のステアリング(2)に左右方向の振動トルクを与える振動トルク付与手段(8)と、を有し、振動トルク付与手段は、車両の走行車線からの逸脱が検出され又は逸脱が予測されるとき、ステアリングにそのときの舵角を中立位置とする左右方向の振動トルクを付与すると共に、検出された逸脱方向と反対方向側の振動トルクの付与時間を逸脱方向側の振動トルクの付与時間より長く付与する。
(もっと読む)
電動パワーステアリング装置
【課題】車両への搭載性が良好で、減速機を廃止できる電動パワーステアリング装置を提供すること。
【解決手段】電動パワーステアリング装置1は、ステアリングシャフト3と、ステアリングシャフト3に連結されたステアリングホイール2とを含む。ステアリングホイール2は、ステアリングシャフト3に連結されたロータ13、および車体に連結されるステータ14を含む電動モータ11と、運転者によって操舵トルクが入力されるグリップ10と、ロータ13とグリップ10とを相対移動可能に連結する弾性部材12とを含む。電動パワーステアリング装置1は、さらに、ロータ13とグリップ10との相対移動量に基づいてグリップ10に入力された操舵トルクを検出するトルクセンサ23と、トルクセンサ23の出力に基づいて電動モータ11を制御するECU24とを含む。
(もっと読む)
61 - 80 / 3,122
[ Back to top ]