
Fターム[3D233CA18]の内容
パワーステアリング装置 (30,926) | 電気式パワーステアリング (28,865) | 電動機などの制御のための検出 (13,688) | 操舵の状況 (7,023) | 車輪の操舵角、操舵量、操舵方向 (888)
Fターム[3D233CA18]に分類される特許
141 - 160 / 888
車線逸脱警報装置
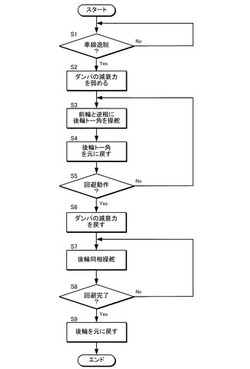
【課題】車両が車線を逸脱すると予測された場合に、運転者がすぐに回避行動を取ることができる車線逸脱警報装置を提供する。
【解決手段】車両(V)の走行車線からの逸脱が予測された場合(ステップS1)、一時的に後輪トー角を前輪と逆相に制御して逸脱方向のヨーモーメントが発生させるとともに、サスペンションを制御してロール感を強調する(ステップS2〜S4)。このため、車両運転者は、強い注意を喚起されてすばやく回避動作を取ることができる。
(もっと読む)
車両挙動制御装置

【課題】 スラローム走行時等における円滑な制御を実現した車両挙動制御装置を提供する。
【解決手段】 ATTS−ECU16は、ステップS24でベース係数Kbに遅延フィルタ処理を行ってフィルタ係数Kfを算出/設定した後、ステップS25でベース係数Kbとフィルタ係数Kfとを和すことで係数合算値Ksを求める。次に、ATTS−ECU16は、ステップS26で係数合算値Ksが判定閾値Kthより大きいか否かを判定し、この判定がYesであればステップS27で不感帯係数Knを1とする。これにより、駆動力配分制御において制御指示ベース値Dbがそのまま目標駆動力配分制御値Dtgtとなる。なお、判定閾値Kthは、十分に小さな値に設定されている。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作のための情報を伝達すること。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者に入力される上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して運転者に伝達し、リスク伝達手段が、リスクポテンシャルの大きさに応じて、操作反力付与手段における反力を付与する。
(もっと読む)
車両挙動制御装置
【課題】操舵伝達特性可変設定装置を組み込まれた電動式パワーステアリング装置付き操舵装置を有する車両において、電動式パワーステアリング装置が失陥し、セルフステアが生じた場合に、対策装置を冗長なものにすることなく、運転者のステアリング操作に違和感を与えないようにすること。
【解決手段】故障判定部108によって電動式パワーステアリング装置の失陥が検出され、且つセルフステア検出部112によってセルフステアが検出された場合には、VGS用モータ58によって電動式パワーステアリング装置の失陥によるセルフステアを打つ消す方向の操舵を行う。
(もっと読む)
車両の操舵装置
【課題】 車両の横方向に加わる外乱による挙動変化を抑制する車輪の転舵動作に応じて適切に操舵ハンドルに付与される反力を変動させる車両の操舵装置を提供すること。
【解決手段】 基本反力演算部201は、目標横加速度演算部101によって計算された目標横加速度G*を入力するとともに操舵角センサ31により検出した操舵角θMAを入力し、目標基本操舵反力トルクTz*を計算する。追加アシスト力演算部202は、横加速度偏差演算部103によって計算された偏差ΔGを入力し、横風等の外乱に抗する方向への運転者による操舵ハンドル11の回動操作を支援するための目標追加アシストトルクTa*を計算する。目標反力演算部203は、基本操舵反力トルクTz*と追加アシストトルクTa*とを加算して目標反力トルクTt*(=Tz*+Ta*)を計算する。
(もっと読む)
ステアバイワイヤ式操舵装置
【課題】 転舵モータ失陥時にも転舵可能なフェールセーフ機能を有し、かつトー角の調整が可能なステアバイワイヤ式操舵装置を提供する。
【解決手段】 操舵軸10と機械的に連結されないステアリングホイール1と、その操舵角を検出する操舵角センサ2と、ステアリングホイール1に反力トルクを与える操舵反力モータ4と、2つの転舵モータ6A,6Bと操舵反力モータ4を制御するステアリング制御部5aとを備える。転舵モータ6Aの出力を操舵軸10に伝達する出力伝達機構15と、他の転舵モータ6Bの出力を操舵軸10に伝達する出力伝達機構16とを設け、転舵を行う。両転舵モータ6A,6Bの出力軸を滑りねじ機構24を介して結合する。両転舵操モータの一方が失陥したとき、他方の出力を滑りねじ機構24を介して失陥した転舵モータに対応する出力伝達機構15(16)に伝達する。
(もっと読む)
車両用舵角制御装置及び車両用舵角制御方法
【課題】前輪転舵アクチュエータ5の異常が解消してから通常の4輪操舵制御に復帰する時間を短縮する。
【解決手段】前輪転舵アクチュエータ5の異常を検出し且つ後輪転舵アクチュエータ9の異常を検出していない場合には、後輪の転舵角を中立位置の角度に制御すると共に前輪転舵アクチュエータ5の駆動を禁止し、前輪転舵アクチュエータ5の異常を検出し且つ後輪転舵アクチュエータ9の異常を検出している場合には、上記前輪転舵アクチュエータ5及び後輪転舵アクチュエータ9の駆動を禁止する。更に、上記後輪転舵アクチュエータ9の異常を検出した後に、当該後輪転舵アクチュエータ9の異常が検出されなくなると、上記後輪の転舵角を中立位置の角度に制御する。
(もっと読む)
車両の操舵装置
【課題】 車両の横方向に加わる外乱による挙動変化に伴って発生する横加速度を適切に寄与させて車輪を転舵制御する車両の操舵装置を提供すること。
【解決手段】 目標横加速度演算部101は、目標とするθMA−γ特性を実現するθMA−G特性に基づいて設定されるフィルタX(s)と操舵角θMAとを乗算して、目標横加速度G*を計算する。フィードフォワード演算部102は、目標横加速度G*に基づいてフィードフォワード制御値δffを演算する。横加速度偏差演算部103は、目標横加速度G*と実横加速度Gとの偏差ΔGを計算し、PI制御部104が偏差ΔGに応じたフィードバック制御値Δδfbを演算する。そして、目標転舵角演算部105は、制御値δffと制御値Δδfbとを加算して目標転舵角δ*を計算する。
(もっと読む)
車両用操舵装置、車両用操舵方法、車両用操舵装置付き車両
【課題】運転者に違和感を与えることのない車両用操舵装置を提供する。
【解決手段】前輪2FL、2FRが転舵を行う操向輪となっている。また、操舵機構4と転舵機構5とが機械的に切り離された、いわゆる、ステアバイワイヤシステムである。運転者の操舵力に応じた第1操舵反力と、操向輪2FL、2FRに加わる転舵反力に応じた第2操舵反力とに基づいて、ステアリングホイール6へ付与する操舵反力を制御し、操向輪2FL、2FRの転舵角が大きくなるほど操舵反力のうち第1操舵反力の割合を小さくするようにした。
(もっと読む)
車両用操舵装置、車両用操舵装置付き車両
【課題】不要な操舵反力により運転者に違和感を与えることのない車両用操舵装置を提供する。
【解決手段】操舵側差動伝達機構13の第1回転要素に接続した操舵軸3と、転舵側差動伝達機構14の第1回転要素に接続した転舵軸5と、操舵部に付与する反力トルクを発生し、操舵側差動伝達機構13の第2回転要素に接続した反力モータと、操向輪を転舵させる転舵力を発生し、転舵側差動伝達機構14の第2回転要素に接続した転舵モータと、操舵側差動伝達機構13の第3回転要素と、転舵側差動伝達機構14の第3回転要素とを接続する回転伝達軸18と、回転伝達軸18の回転を固定することにより操舵部から操向輪への力の伝達を遮断し、回転伝達軸18の回転を自由にすることにより操舵部から操向輪への力の伝達を行うロック機構15と、を設けた。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
車両用転舵制御装置および車両用転舵制御方法
【課題】μスプリット路面での制動時、車両重心回りのヨーモーメントが増加することなく、ドライバの修正操舵量を減少することのできる車両用制御装置および車両用制御方法を提供する。
【解決手段】目標後輪転舵角演算部72が目標後輪転舵角を演算する。目標後輪転舵角補正部74は、μスプリット路判断部73が、路面がμスプリット路であると判断した場合、目標後輪転舵角を小さく補正した目標後輪転舵角補正値を演算する。この目標後輪転舵角補正値に基づいて後輪転舵角を補助操舵する。これにより、車両重心回りに発生するヨーモーメントを減少する。よって、μスプリット路の制動時における、ドライバによる修正操舵が容易になる。
(もっと読む)
操舵入力装置および操舵制御装置
【課題】反力モータおよびクラッチの小形化を図ることができる操舵入力装置および操舵制御装置を提供することにある。
【解決手段】反力付与機構である反力モータ8は、ステアリングハンドル2に操舵負荷を付与する。変速機構である第1減速手段9は、反力モータ8の出力回転速度を減速して操舵軸5に伝達する。断接機構であるクラッチ機構10は、変速機構と転舵機構15との間の回転力の伝達を断接する。転舵力付与機構である転舵モータ13は、転舵機構に転舵力を付与する。制御部30は、車両の運転状態に応じて反力モータ8および転舵モータ13を制御すると共に、反力モータ8または転舵モータ13の駆動を正常に行えるときクラッチ機構10を切断し、正常に行えないときクラッチ機構10を接続させる。
(もっと読む)
舵角可変式ステアリング装置
【課題】ボール減速機のトルク伝達方向の剛性を規定値以上に保持することができ、長期間に亘って安定した操舵特性を維持することができる舵角可変式ステアリング装置を提供する。
【解決手段】舵角可変式ステアリング装置10は、ステアリングホイールの回転に伴って回転する入力軸18と操舵輪に舵角を付与する出力軸19との間で回転トルクを伝達するボール減速機14を備え、出力軸19は、入力軸18側の一端に小径軸部36が形成され、入力軸18に設けられる嵌合穴43に嵌合する小径軸部36の先端部に固定される円環部材47と、入力軸18と出力軸19との軸方向相対移動を許容する所定の隙間Cが設けられて、入力軸18と円環部材47との間に配置される弾性体50と、を備え、弾性体50によってボール減速機14に予圧を付与する。
(もっと読む)
舵角比可変制御装置
【課題】車両の運転性能の向上を図る。
【解決手段】制御装置20は、車速センサ15によって検出された車速Vに基づいて基本ステアリングギヤ比を設定するとともに、圧力センサ14によって検出されたステアリング把持力Hに基づいてギヤ比補正係数を設定し、その設定した基本ステアリングギヤ比とギヤ比補正係数とを乗じることによりステアリングギヤ比を設定する。
摩擦係数の低い路面における低速走行中であっても、違和感を生じさせないような操舵が可能となり、車両の運転性能の向上を図ることができる。
(もっと読む)
車両制御装置
【課題】RTCの制御と左右前輪の駆動力配分の制御とを組み合わせて、車両の安定化と旋回のしやすさとを併せて実現させることができる車両制御装置を提供する。
【解決手段】低速走行時は、駆動力配分装置200の制御ゲインを、駆動力配分制御ゲイン可変手段200tにより増加し、かつRTC装置120の制御ゲインを、RTCゲイン可変手段120tにより減少することにより、走行中の車両の旋回性能を向上させる。また、高速走行時は、駆動力配分装置200の制御ゲインを、駆動力配分制御ゲイン可変手段200tにより減少し、かつRTC装置120の制御ゲインを、RTCゲイン可変手段120tにより増加することにより、走行中の車両の安定性能を向上させる。
(もっと読む)
車両用操舵装置
【課題】フェール時における操舵フィーリングをより良くすることのできる車両用操舵装置を提供すること。
【解決手段】伝達比可変機構の差動機構は、操舵部材に連なる第1のサンギヤと、転舵輪側部材としての第2のシャフトに連なる第2のサンギヤと、各サンギヤに噛み合う遊星ギヤと、遊星ギヤを保持するキャリアと、キャリアをロック可能なロック機構とを含む。ECUの第1の異常検出部が伝達比可変機構の出力の異常を検出した場合(ステップS1でYES)において、ECUの第2の異常検出部が遊星ギヤ機構の異常を検出したとき(ステップS2でYES)、ロック機構によるキャリアのロックを禁止する(ステップS3)。一方、第2の異常検出部によって遊星ギヤ機構の異常が検出されないとき(ステップS2でNO)、ロック機構によってキャリアがロックされる(ステップS3)。
(もっと読む)
車両の挙動支援装置及び車両の挙動支援方法
【課題】転舵輪の路面限界舵角をより精度よく導出できる車両の挙動支援装置及び車両の挙動支援方法を提供する。
【解決手段】ECUは、車両がアンダーステア状態になったと判定した場合(ステップS16が肯定判定)、アンダーステア状態になった時点の車両の車体速度VS及びステアリングホイールの操舵角θに基づき摩擦限界舵角σ_fを導出し(ステップS17)、その後、路面の悪路指数Nrwを演算する(ステップS18)。続いて、ECUは、路面の悪路指数Nrwが大きいほど大きくなるように補正角度Δσを設定する(ステップS19)。そして、ECUは、摩擦限界舵角σ_fと補正角度Δσとの和を路面限界舵角σmaxとし(ステップS22)、前輪の転舵角σの絶対値が路面限界舵角σmax以下となるように転舵角調整制御を行なう(ステップS23)。
(もっと読む)
車両の運動制御装置
【課題】操舵角制御と制動力制御とを組み合わせて旋回操作時における車両の運動制御を行う運動制御装置において、通常時には操舵角制御を反映した実際のタイヤ切れ角に基づいた制動力制御を行う一方、オーバーステア発生時にはタイヤ切れ角の変化が不連続になることによる制動力制御の制御性の悪化を抑制し、或いは、制動力制御に用いる操舵角信号を車両状態に応じて使い分けて、状況に応じた制動力制御の制御性を確保する。
【解決手段】実旋回制御量が目標旋回制御量となるように操舵輪FL,FRの操舵角を制御する操舵制御ECU20と、実旋回制御量が目標旋回制御量となるように車両制動力を制御する制動及びエンジン制御ECU30とを備え、操舵制御ECUが車両オーバーステア時に補正するオーバーステア時操舵角補正量を、制動及びエンジン制御ECUが車両制動力の制御に用いる操舵角信号に反映させないように構成されていることを特徴とする。
(もっと読む)
141 - 160 / 888
[ Back to top ]