
Fターム[3D244AD12]の内容
Fターム[3D244AD12]に分類される特許
1 - 20 / 59
車両用走行制御装置
【課題】 ドライバの加速意図を反映しつつドライバの違和感を抑制することができる車両走行制御装置を提供すること。
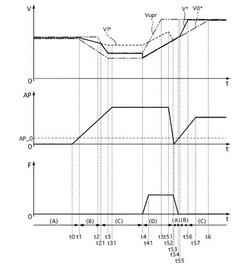
【解決手段】 車両がカーブ路を走行する際、カーブ路の曲率に基づいて算出された目標車速V0*となるように車両を加減速制御し、加減速制御中にドライバのアクセルペダル操作が検出されると、検出されたアクセルペダル操作量(アクセル開度AP)に基づいて目標車速V0*を修正するとともに、目標車速V0*により発生する車両の横加速度αyよりも大きい横加速度を許容する許容車速Vuprよりも高くならないように目標車速V*を制限し、目標車速V*の制限中に許容車速Vuprが上昇した場合、アクセルペダルの操作反力Fを発生させると共に、アクセルペダル操作が検出されなくなるまで、加減速制御における車両の加速度を、許容車速Vuprを実現する加速度αy'よりも小さくなるように制限する。
(もっと読む)
走行制御装置

【課題】不要な加速を抑制するとともに、先行車両に対して安定して追従することができる走行制御装置を提供する。
【解決手段】本発明に係る走行制御装置1は、自車両が走行している車線上で、自車両の最も近くに存在する先行車両の走行状態を判定する先行車両走行状態判定部21と、先行車両走行状態判定部21によって判定された先行車両の走行状態に基づいて、加速度の制限値を設定して自車両の走行制御を行う走行制御部22と、を備える。
(もっと読む)
車速制御システム
【課題】オートクルーズによる運転をより円滑に行うことが可能となるシステムを提供する。
【解決手段】車速制御装置は、オートクルーズにより自車両の車速を目標速度に維持した状態で運転が行われている際に、現在の燃料の残量により目的地まで到達できないことが判明すると(S325:Yes)、ナビゲーション装置により目的地までのエコルートを探索させる。そして、燃料を効率良く消費できる低燃費速度でエコルートを走行した際に、現在の燃料の残量で目的地まで到達可能か否かを判定し、到達可能と判定した場合には(S350:Yes)、低燃費速度を推奨速度として提示し(S355)、ドライバに対し、低燃費速度を目標速度として設定するように促す。
(もっと読む)
車両用走行制御装置
【課題】自車両と先行車両との車間距離を維持する車間制御クルーズ走行において、運転者に与える違和感を抑制可能とする。
【解決手段】駆動輪に駆動力を伝達する駆動源としてエンジン1及びモータ2を備えるハイブリッド車両の走行を制御する車両用走行制御装置であって、運転者による起動操作により作動して、先行車両との車間距離を目標車間距離に自動調整する自動車間距離制御走行手段と、自動車間距離制御走行手段の作動中に、運転者の駆動力増加要求に対する反力を、車間距離に応じて発生させる反力発生手段を備え、反力発生手段が反力を発生させていると判定すると、エンジン1の停止を禁止する処理を行う。
(もっと読む)
運転支援情報提示装置
【課題】減速のみでなく、渋滞を回避して車間距離を維持するための加速を促す情報を提示でき、先行車に衝突することなくかつ低燃費走行のための操作の補助となる情報を提示でき、状況の確認/操作は運転者が行うこととして、システム依存が起こりにくいシステムを提供する。
【解決手段】システムは、車速検出手段と、適正車間距離演算手段と、先行車との車間距離から適正な車間距離に対する先行車との遠近の程度を示す指標を作成する車間距離表示データ作成手段と、作成された指標を表示する車間距離表示手段と、単位時間当たりの先行車との車間距離変化量と車速の変化率に相当する車間距離変化量とを比較して車間距離の変化の段階を判定する車間距離変化段階判定手段と、車間距離の変化段階を表示する車間距離変化段階表示手段とを備える。
(もっと読む)
先行車追従制御方法及び先行車追従制御装置
【課題】個々の運転者のフィーリングに合う先行車追従制御ができ、ヒヤリハットを防止できる先行車追従制御方法及び先行車追従制御装置を提供する。
【解決手段】先行車と自車の車両情報を用いて自車が先行車に追従するための目標加速度を決定する先行車追従制御方法において、自車加速度が先行車加速度に所定の遅れ時間をもって追従できる加速度として演算した加速度要因加速度と、自車速度が先行車速度に所定の遅れ時間をもって追従できる加速度として演算した速度要因加速度と、車間距離を所定の目標車間距離に保てる加速度として演算した車間距離要因加速度とを重み付きで総和して目標加速度とする。
(もっと読む)
油圧無段変速機付き自走式車両
【課題】所望の位置でアクセルを保持することのできるクルーズコントロール機構を備える油圧無段変速機付き自走式車両を提供する。
【解決手段】HST(油圧無段変速機)1と、回動させることによってHST1の変速操作をする前進アクセルペダル(変速操作部材)28と、前進アクセルペダル28の回動位置を保持するクルーズコントロール機構30とを有するHST付きトラクタ(自走式車両)21において、クルーズコントロール機構30が摩擦部材30hを備え、摩擦部材30hによって前進アクセルペダル28の回動位置を保持する。
(もっと読む)
車両用走行制御装置
【課題】運転者に違和感を感じさせず、運転者の志向に合わせることができ、複数の個人が運転者として利用できる車両用走行制御装置を提供する。
【解決手段】先行車情報を検出する先行車センシング部2と、自車情報を検出する自車センシング部3と、過去の先行車情報及び自車情報を蓄積する学習データストア部4と、先行車情報と自車情報とパラメータとに基づいて自車が先行車に追従するための目標加速度をドライバモデル式により算出する目標加速度演算部5と、目標加速度演算部5により算出された目標加速度と運転者が手動で先行車に追従する運転をしたときの加速度との差を最小にするパラメータを同定して運転者固有の個人パラメータとする個人パラメータ部分同定部6とを備える。
(もっと読む)
車両用追従走行制御装置
【課題】 車両用追従走行制御装置において、自車が先行車の発進に追従して自動的に発進する機能を備えていると運転者が誤認するのを防止する。
【解決手段】 停止した先行車Vbに追従して停止しようとした自車Vaの減速中に先行車Vbが発進した場合、自車Vaが先行車Vbに追従してそのまま加速すると、運転者は自車が自動発進機能を備えていると誤認する可能性がある。そこで先行車Vbの停止位置に仮想先行車Vb′を設定することで、実際の先行車Vbが発進した場合でも、停止中の仮想先行車Vb′に追従して自車Vaを一旦停止させる。その結果、運転者が発進スイッチを操作して発進意思を示すまで自車Vaは発進することがなくなり、自車が自動発進機能を備えていると運転者が誤認するのを防止することができる。
(もっと読む)
アクセルペダル反力制御装置
【課題】電気的に制御されるアクチュエータによる消費電力を抑制することが可能なアクセルペダル反力制御装置を提供する。
【解決手段】アクセルペダル反力制御装置12は、電気的に制御されるアクチュエータ28によりアクセルペダル14に反力Frを付与する。アクセルペダル反力制御装置12は、車両10が定速走行しているとき、反力Frを減少させる。
(もっと読む)
車速制御装置
【課題】車両の運転状態に応じて一定速走行を開始することのできる車速制御装置を提供する。
【解決手段】所定時間内における車両の速度Vが所定の車速の範囲内である場合に車速Vを一定に制御する車速制御装置において、所定時間内における車両の運転状態に応じた車速Vの変化幅が所定の変化幅ΔVよりも小さいことを判断する変化幅判断手段(ステップS3)と、所定時間内における車両に対し制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さいことを判断する制動力要求操作頻度判断手段(ステップS4)と、車両の速度の変化幅が所定の変化幅ΔVよりも小さく、かつ制動力を発生させる制動力要求操作の操作頻度が所定頻度よりも小さく、かつ駆動力を発生させる駆動力要求操作がOFFになった場合に、車速が一定になるように制御を開始する一定速制御開始手段(ステップS9)とを備えている。
(もっと読む)
車両
【課題】運転支援を促進する車両を提供する。
【解決手段】車両10のエンジン出力調整装置26は、自車10と隣接車両30a、30bとが並走状態であることを示す対隣接車両車速偏差の閾値TH_ΔVsf、TH_Δを設定し、前記対隣接車両車速偏差が前記閾値よりも小さいとき、前記車線の走行方向において自車10が前記隣接車両30a、30bと重ならない位置に来るように前記エンジンの出力を直接的又は間接的に調整する隣接車両車間確保処理を実行する。
(もっと読む)
車両走行制御装置
【課題】ドライバがアクセルペダルを踏んだままの状態で、自動で追従制御を開始し、ドライバがアクセルペダルを踏み込むと追従制御が解除される車両走行制御装置。
【解決手段】アクセルペダルの操作の変化量が、所定の範囲内に所定の時間以上、留まる場合、通常制御から追従制御へ切替え、先行車との車間距離を所定の距離に保つ自動制御を開始し、アクセルペダルの操作の変化量が、所定値以上増加した場合には、追従制御から通常制御へ復帰する、アクセル操作反力演算部からの指令値に応じて操作反力を前記アクセルペダルに発生させる、また、追従制御から通常制御に切り替わった時に、前記追従制御部のトルク指令値から前記通常制御部のトルク指令値へ所定の傾きをもって切替えること。
(もっと読む)
車速制限装置及び車速制限方法
【課題】ASL制御時に設定リミッタ速度を超えて安全に車両を加速させる車速制限装置を提供する。
【解決手段】ASL制御時においてアクセルペダルの踏み込み量が所定量以上になったことが検知されたとき、車間距離に応じて自車両の加速制御を行うエンジンECUを備える。このエンジンECUは、車間距離が所定距離以上の場合、アクセルペダルの踏み込み量に応じた加速度で自車両を加速させ、車間距離が所定距離未満の場合、アクセルペダルの踏み込み量に応じた加速度よりも制限された加速度で自車両を加速させる。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】定速クルーズ走行中、運転者に違和感を覚えさせない車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】アクセルペダル12に対する反力Frを急増させるペダル操作量Pを、車両100が走行している際の目標スロットル弁開度θtと基準スロットル弁開度θrとの差D1、D2に応じて変化させる。これにより、車両100が坂道に差し掛かった等、車両100に対する外的負荷が変わったため、クルーズ速度Vcrを維持するためにエンジン30の出力を増減させる場合、前記外的負荷に応じてペダル操作量Pを変化させることができる。その結果、エンジン30の出力とペダル操作量Pのずれに起因する違和感が運転手に発生することを防止することができる。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】アクセルペダルへの反力を増大させる速度やクルーズ速度等の目標速度を自動的に設定する場合でも、目標速度の設定に運転者の意思を反映することができる車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】車両の走行環境又は走行状態に応じて設定される推奨速度Vrecの値が変更されると、ECU22は、反力増大基準速度Vrr(推奨速度Vrecに基づいて設定され且つ反力付与機構24からアクセルペダル12に対する反力Frを設定する基準となる速度)の変更の拒否を、スピーカ26を介して運転者に問い合わせる。運転者が許可ボタン28を押すと、当該変更が許可され、反力増大基準速度Vrrは変更後の推奨速度Vrecに設定される。運転者が許可ボタン28を押さないと、当該変更は許可されず、反力増大基準速度Vrrは変更前の推奨速度Vrecに維持される。
(もっと読む)
車両走行制御装置及び車両走行制御方法
【課題】車両の推奨速度が自動的に設定され、車速と推奨速度との間に差が生じた際に運転者の意思を考慮した対応を取ることができる車両走行制御装置及び車両走行制御方法を提供する。
【解決手段】操作量センサ14で検出した実測ペダル操作量θrが、推奨速度Vrecに対応する推奨ペダル操作量θrec及び誤差許容量βの和よりも大きいとき(θ>θrec+β)、アクセルペダル12が戻し中でなければ、反力付与機構24及びアクセルペダル12の組合せと、スピーカ26とにより運転者に警告を行う。これにより、運転者による減速動作としてのアクセルペダル12の戻しがない場合にのみ、すなわち、運転手が減速の必要性を認識していない場合にのみ、警告を行うことで、運転手の意思を考慮した対応を取ることができる。
(もっと読む)
運転支援装置、運転支援方法および運転支援プログラム
【課題】スロットル制御が解除されたときに、運転者自身のアクセルペダルの踏み込み量から予測される車両の挙動と実際の車両の挙動とがスムーズに合致しないと感じることがあった。
【解決手段】自車両のアクセルペダルの位置と駆動源の出力の調整量とについて予め設定された対応関係を適用せずに前記調整量を制御し、前記対応関係を適用せずに前記調整量が制御されることによって前記自車両が基準車速で走行する基準車速走行区間の終了地点を、前記自車両が通過したか否かを判定し、前記自車両が前記終了地点を通過したと判定されると、通過した時点での実際の調整量に対して前記対応関係を適用した場合のアクセルペダルの位置と、通過した時点での実際のアクセルペダルの位置と、のずれを解消する方向に前記アクセルペダルを駆動するための制御を行う。
(もっと読む)
車間距離制御装置
【課題】交通事故を未然に防ぐことができる車間距離制御装置を提供すること。
【解決手段】車間距離制御装置は、自車の位置を示す自車位置情報を衛星通信により取得する。自車の周囲に他車が存在する場合、他車に搭載された車間距離制御装置に対して無線通信を行い、他車の位置を示す他車位置情報を全て取得する。地図を表す地図データベースを参照して、全ての他車位置情報の中から、自車の前後に存在する特定他車の位置を示す特定他車位置情報を特定する。自車位置情報が示す位置と特定他車位置情報が示す位置とに基づいて、自車と特定他車との距離を表す車間距離を算出する。自車の速度を計測し、速度と適切な車間距離とを対応付ける距離データベースを参照して、自車の速度に対応する適切な車間距離として検索適切車間距離を検索する。車間距離が検索適切車間距離よりも短い場合、その旨を表す注意情報を自車の運転手に通知する。
(もっと読む)
追従走行制御装置
【課題】追従走行の発進時に、制御のもたつきや先行車の挙動に起因にした変動のない、スムーズで滑らかな発進を実現する。
【解決手段】判断部22により先行車の発進と判断すると、検出部21の検出に基づき、先行車に対する自車1の追従状況に応じて時々刻々変化するFF制御の目標値を設定部23が設定する。そして、FF制御部24の走行制御により、設定された目標値に基づき、先行車の時々刻々の発進状況に応じたFF制御で自車がもたつきや変動のない、スムーズで滑らかな発進を実現する。
(もっと読む)
1 - 20 / 59
[ Back to top ]