
Fターム[3D244AD21]の内容
Fターム[3D244AD21]に分類される特許
101 - 120 / 424
ドライバ状態検出装置、車載警報装置、運転支援システム
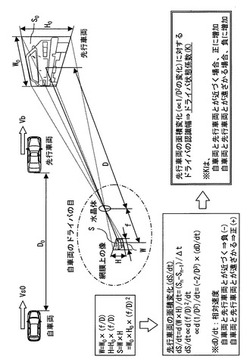
【課題】ドライバの運転状態を総合的に検出することができるドライバ状態検出装置を提供する。
【解決手段】自車両の進行方向に先行車両が存在する場合、ドライバからみた先行車両の像の大きさの変化度合いを示すドライバ状態係数Kを算出し、このドライバ状態係数Kからドライバの運転状態を検出する。このドライバ状態係数Kは、自車両に先行車両の画像を撮影する撮像手段を備えておき、その撮像手段の撮影した先行車両の画像の面積の単位時間当たりの変化度合いから算出する。
(もっと読む)
車間距離制御装置

【課題】運転者による加減速操作に応じて目標車間距離を変更した場合にドライバビリティの悪化を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置であって、運転者の加速操作を検出する加速操作検出手段と運転者の減速操作を検出する減速操作検出手段の少なくとも1つの操作検出手段と、自車と先行車との車間距離を取得する車間距離取得手段と、運転者の加速操作又は減速操作に応じて車間距離に基づいて目標車間距離を変更する目標車間距離変更手段と、自車と先行車との相対速度を取得する相対速度取得手段とを備え、目標車間距離変更手段は、加速操作終了が検出された後又は減速操作終了が検出された後に、自車と先行車との相対速度が零になったときの車間距離に基づいて目標車間距離を変更することを特徴とする。
(もっと読む)
車間距離検出装置および車速制御システム
【課題】超音波を用いた車間距離検出装置において、計測の精度を向上させる。
【解決手段】自車200の前部に設置され、先行車300に対して超音波Sを送信するとともに、先行車300で反射して戻った超音波S′を受信する超音波送受信機10と、超音波Sが超音波送受信機10から送信されてから、反射波としての超音波S′が受信されるまでの経過時間ΔTを計時する計時手段30および経過時間ΔTに基づいて先行車300との間の車間距離Lを算出する距離演算部50を有する距離算出装置20と、を備え、距離算出装置20は、反射波として受信した超音波S′のうち、路面(500)から反射して受信したノイズ成分(S2′)を除去するノイズ信号除去手段40を備え、距離演算部50は、ノイズ信号除去手段40によって除去された後の超音波S′についての経過時間ΔTに基づいて、車間距離Lを算出する。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、ACC制御の実行中に、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に、先行車が存在するときは、車間制御ECU20及びブレーキ制御ECU42は先行車の減速度に応じて自車両を減速させる。これにより、運転者が居眠り等の状態にないにも関わらず、運転者の意図に反して速度が低下することが少なくなり、安全性を確保しつつ運転者に与える違和感を軽減することが可能となる。
(もっと読む)
運転支援装置
【課題】安全性を確保しつつ運転者に与える違和感を軽減した運転支援装置を提供する。
【解決手段】
車間制御ECU20が、自車両を設定車速又は設定車間距離に従って走行させるACC制御を実行し、ドライバー意識・状態検出センサ48等が、運転者が運転に不適正な運転不適状態であることを検出し、車間制御ECU20がACC制御を実行しているときに、ドライバー意識・状態検出センサ48等が運転者が運転不適状態であることを検出したときは、自車両の加速を抑制する加速抑制制御を実行し、加速抑制制御中に車間制御ECU20は、運転者のアクセル操作があったときは加速抑制制御を続行し、当該アクセル操作後に再度のアクセル操作があり、運転者が居眠りや意識低下の状態にないことが明らかであるときは加速抑制制御を解除する。これにより、安全性を確保しつつ運転者に与える違和感を軽減することができる。
(もっと読む)
加速度制御装置及び加速度制御プログラム
【課題】車両の走行状態に応じて生じ得る加速度制御の遅れを抑制する。
【解決手段】減速操作を終えた直後にドライバ要求加速度を上回るACC要求加速度で加速度制御(ACC)が開始された場合、従来の制御(a)では、ACC開始時点での実加速度をジャーク制限後要求加速度の初期値としてジャーク制限が行われるため、ACC要求加速度は加速を要求しているにもかかわらす、時刻t1から時刻t2まで不要な減速を行ってしまう。これに対し、本発明の制御(b)では、加速度制御が開始された時点での実加速度及びドライバ要求加速度のうち、ACC要求加速度との差が小さい方をジャーク制限後要求加速度の初期値として設定する。このため、ドライバ要求加速度が初期値として設定されることとなり、実加速度がドライバ要求加速度まで迅速に上昇することの妨げにならない。
(もっと読む)
車間距離制御装置
【課題】自車両が被牽引車両を牽引する場合に安全な制動距離を確保することができると共に、走行安定性を高めることができる車間距離制御装置を提供すること。
【解決手段】自車両と先行車両との車間距離を制御する車間距離制御装置10において、自車両が被牽引車両を牽引しているか否かを判定する判定手段12と、自車両と先行車両との目標車間距離を判定手段12の判定結果に応じて決定する車間距離決定手段14と、自車両の目標加減速度を判定手段12の判定結果に応じて決定する加減速度決定手段16と、目標車間距離及び目標加減速度に基づいて自車両を制御する制御手段18とを備える。
(もっと読む)
車両制御装置
【課題】より快適な運転フィーリングを実現することができる車両制御装置を提供すること。
【解決手段】本発明による車両制御装置1は、車両に制動力を作用させて制動を行う制動手段6aと、車速を設定車速以下に制限するよう制動手段6aを制御する制限手段3aと、車速を検出する車速検出手段3bと、ブレーキペダルの踏み込み量を検出する踏み込み量検出手段6bと、車両の前方に位置する先行車両の有無及び先行車両との車間距離を検出する車間距離検出手段3cと、制限手段3aが制限を実行して、踏み込み量が所定量以内で、車間距離検出手段3cが先行車両は無いと検出して、車速が設定車速に対して所定速度以内となった場合に、制限手段3aの制御に基づいて制動手段6aが制動力を低下させることを特徴とする。
(もっと読む)
レーダクルーズコントロールシステム
【課題】本発明は、レーダクルーズコントロールシステムに関し、自車両が停車禁止区域手前直前で停車した後に運転者による発進操作に従って発進する場合に、自車両が停車禁止区域内で停車するのを防止することにある。
【解決手段】先行車両の停車に伴って自車両を停車させる停車保持制御を少なくとも含む、自車両を先行車両に追従走行させる先行車両追従制御を実行するレーダクルーズコントロールシステムにおいて、自車両が停車禁止区域手前直前で停車されている際に運転者による発進操作が行われた場合、自車両が該発進操作に従って発進しても停車保持制御により停車禁止区域内で停車される状況にあるか否かを判別する。その結果、自車両が発進操作に従って発進しても停車禁止区域内で停車される状況にあると判別した場合、その発進操作に従った自車両の発進を禁止する。
(もっと読む)
走行支援装置
【課題】 一定車速での走行を支援する際に、燃費の向上を図ることができる走行支援装置を提供する。
【解決手段】 走行制御ECU1は、目標車速Vtとする一定車速での走行制御を支援する。このとき、坂路の手前の区間において、坂路走行による車速変化と逆方向の車速変化を許容して支援を行う。たとえば、上り坂路の手前位置では、減速を抑制する制御を行い、下り坂路の手前位置では、加速を抑制する制御を行う。
(もっと読む)
車速制御装置
【課題】運転者の感覚に合った走行が可能な適切な目標車速に変更できる車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて車両の車速を制御する車速制御装置であって、運転者の特性を推定する運転者特性推定手段と、走行中の道路形状を取得する道路形状取得手段と、運転者特性推定手段で推定した運転者の特性と道路形状取得手段で取得した道路形状に基づいて目標車速を変更する目標車速変更手段とを備えることを特徴とする。
(もっと読む)
車両の走行制御装置
【課題】レーダ手段が路面マルチパスによる悪影響を受けて誤検知した自車両と先行車両との相対速度を追従走行制御に適用しないようにし、その際の自車両と先行車両との相対速度を適切に決定し追従走行制御に適用して、安定した追従走行制御を実現することができる、車両の走行制御装置を提供する。
【解決手段】走行制御装置1において、相対速度検知部で検知され且つ追従走行制御に適用された最新の複数の相対速度を相対速度記憶部に記憶し、相対速度変換部により、ミリ波レーダで先行車両からの反射波の受信強度を検出するとともに、その受信強度の低下率が設定値以上か否か判定し、肯定判定した場合に、相対速度記憶部に記憶された最新の相対速度に応じた相対速度を追従走行制御に適用するように変換する。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
車間距離制御装置
【課題】より快適な運転フィーリングを実現することができる車間距離制御装置を提供すること。
【解決手段】本発明による車間距離制御装置1は、自車両の車速を検出する車速検出手段2aと、先行車両を検出するとともに自車両と先行車両との車間距離を検出する車間距離検出手段2bと、車間距離を車速で除して算出された車間時間を設定車間時間に制御する車間距離制御を行う車両制御手段2cと、車線変更の開始及び終了を検出する車線変更検出手段2dと、運転者の顔向きを検出する顔向き検出手段2eとを備えるとともに、車線変更検出手段2dにより車線変更の終了が検出されて、車間距離検出手段2bにより先行車両が検出されずに、顔向き検出手段2eにより検出された顔向きが前方以外である場合に、車両制御手段2cが車間距離制御による加速を禁止することを特徴とする。
(もっと読む)
車速制御装置
【課題】運転者の意思に応じた目標車速を設定する車速制御装置を提供することを課題とする。
【解決手段】目標車速に基づいて自車の車速を制御する車速制御装置1であって、運転者の減速操作を検出する減速操作検出手段12と、減速操作検出手段12で検出した減速操作に基づいて自車の目標車速を設定する目標車速設定手段34と、自車周辺の物体を検出する周辺物体検出手段10,11,32とを備え、目標車速設定手段34は、周辺物体検出手段10,11,32で自車周辺の先行車以外の物体を検出した場合、減速操作に基づく目標車速の設定を行わないことを特徴とする。
(もっと読む)
車間距離制御装置
【課題】運転者の意図しない目標車間距離の変更を防止する車間距離制御装置を提供することを課題とする。
【解決手段】先行車との車間距離が目標車間距離になるように車両を制御する車間距離制御装置1であって、運転者の加速操作を検出する加速操作検出手段13と運転者の減速操作を検出する減速操作検出手段12の少なくとも1つの操作検出手段と、操作検出手段12,13で検出した運転者の加速操作又は減速操作に基づいて目標車間距離を変更する目標車間距離変更手段35とを備え、目標車間距離変更手段35は、操作検出手段12,13で検出した運転者の操作が先行車への追従走行よりも優先する状況に対応するための操作の場合、操作検出手段12,13で検出した操作に基づく目標車間距離の変更を行わないことを特徴とする。
(もっと読む)
車両用減速制御装置及び車両用減速制御方法
【課題】カーブに対する車両の減速制御を適切に行う。
【解決手段】車両用減速制御装置は、測位部14aが測位した車両位置と記憶媒体14cに記憶された地図情報とを基に、地図情報の地図上の車両位置を特定するマップマッチングを行うマップマッチング部14bと、マップマッチング部14bが特定した地図上の車両位置と地図情報とから、車両前方のカーブ曲率を検出し、検出したカーブ曲率の大きさを基に算出した目標減速度を基に、車両を減速制御する制駆動力コントロールユニット8と、を備える。制駆動力コントロールユニット8は、マップマッチング部14bによるマップマッチングの確度を算出し、算出したマップマッチングの確度が低いほど、目標減速度が小さくなるように補正する。
(もっと読む)
車両の走行制御装置
【課題】後続車の接近中に自車両の目標車速が変更されたときの加減速度を適正に制御することにより乗員の安全性向上を図る。
【解決手段】本発明の車両の走行制御装置は、自車両の走行速度をあらかじめ設定された目標車速に一致させる自動速度制御を行う自動速度制御手段2と、上記目標車速を一定速度刻みで増大または減少させる目標車速変更指示手段(23)と、自車両の後方を走行する後続車を検知する後続車検知手段(11)とを備える。上記自動速度制御手段2は、上記目標車速変更指示手段(23)により目標車速が変更されたときに、上記後続車検知手段(11)からの入力情報に基づき後続車が自車両に対し接近していることが確認されると、上記目標車速の変更に応じて自車両を加速または減速させる際の目標加減速度を、後続車が接近中でないときに設定される通常の目標加減速度βとは異なる値(α,γ)に変更する。
(もっと読む)
走行支援装置
【課題】交通流の円滑化を図ることができる走行支援装置を提供する。
【解決手段】走行支援装置1は、設定車速受信部2、ミリ波レーダ3、クルーズレバー4、車速センサ5、ECU6、エンジン制御部7、ブレーキ制御部8、表示部9、設定車速送信部10を備えている。走行支援装置1では、ECU6によって自車両と先行車両との車間距離が所定の距離以上であり、自車両の設定車速よりも後続車両の設定車速が高い場合に、表示部9によって運転者に後続車両の設定車速が自車両の設定車速よりも高いことが報知される。更に、報知を行ってから所定時間が経過した後に、エンジン制御部7、ブレーキ制御部8によって自車両の設定車速が後続車両の設定車速に変更される。
(もっと読む)
車両走行速度制御方法
【課題】速度制御装置を用いての主として車両停止後の発進時における「ゆっくり加速」あるいは巡航走行時からの「ゆっくり減速」可能な車両走行速度制御方法の提供。
【解決手段】搭載する速度制御装置の設定速度を一定時間T毎に(vo+α・T)、(vo+2・α・T)、・・・(vo+n・α・T)、と順次更新設定することによって車両走行速度vを初期速度voから「ゆっくり加速」あるいは「ゆっくり減速」に対応する一定加速度αで、目標速度vtまで加速あるいは減速する。但しvo:初期速度、α:加速度(加速時においてはα>0、減速時においてはα<0)、T:設定速度更新周期vt:目標速度(加速時においてはvt>(vo+n・α・T)、減速時においてはvt<(vo+n・α・T))、である。
(もっと読む)
101 - 120 / 424
[ Back to top ]